

4. 5. Система кадрової розгортки з переміщенням каретки
В багатьох пристроях барабанного типу, таких як барабанні сканери, імейдж-сеттери, флейт-сеттери тощо, кадрова розгортка здійснюється переміщенням каретки, на якій знаходиться оптичний блок. Функціональна схема системи представлена на рис. 4.15.
На станині 1 закріплена дифракційна лінійка 2, довжина якої рівна діапазону переміщення каретки 4. На дифракційній лінійці з високою точністю нанесені штрихи. На каретці встановлений освітлювач, промінь світла 3 від якого падає на лінійку, відбивається від неї та потрапляє на фотоприймач, також встановлений на каретці.
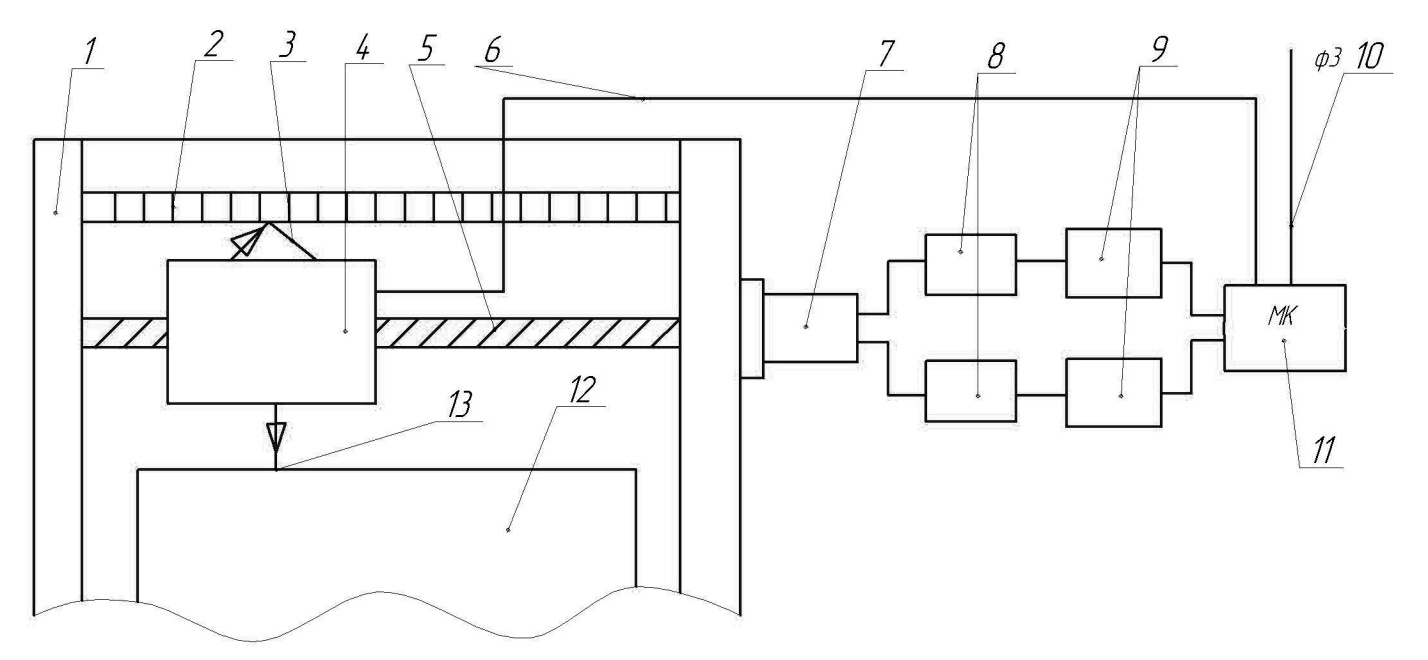
Рис. 4.15 Кадрова розгортка з переміщенням каретки
Каретка
переміщується по ходовому гвинту 5,
котрий приводиться в обертання кроковим
двигуном 7. У той момент часу, коли
світловий промінь 3 потрапляє на штрих
лінійки, на виході фотоприймача
з’являється імпульс. Цей імпульс по
гнучкому кабелю 6 через дискретний порт
вводиться в мікроконтролер 11, на інший
дискретний порт вводяться опорні
імпульси 10, котрі формуються за допомогою
двигуна частоти із напруження кварцового
генератора комп’ютера, який керується
тим пристроєм, на якому використовується
розгортка, що розглядається. В тому
випадку, коли каретка рухається із
заданою швидкістю, фаза φу
імпульсів зворотного зв’язку зміщена
відносно фази φg
опорних імпульсів на постійне значення.
Якщо каретка піде з меншою швидкістю,
ніж задана, то імпульси зворотного
зв’язку почнуть відставати від опорних
імпульсів, а в випадку більш швидкого
руху імпульси зворотного зв’язку будуть
випереджувати опорні. Вимірювання
помилки ε положення імпульсів зворотного
зв’язку відносно опорних здійснюється
згідно алгоритму, описаного в розділі
4. 2., рис 4.6. У керуючому контролері на
основі визначеної помилки розраховується
кутове положення
 поля статора ШД таким чином, щоб
ліквідувати цю помилку ε. За знайденим
кутом
розраховується синусне і косинусне
напруження обмоток статора двохфазного
крокового двигуна, ці напруження
перетворюються в аналогову форму
цифроаналоговими перетворювачами 9,
посилюються посилювачами 8 и живлять
статорні обмотки двигуна 7.
поля статора ШД таким чином, щоб
ліквідувати цю помилку ε. За знайденим
кутом
розраховується синусне і косинусне
напруження обмоток статора двохфазного
крокового двигуна, ці напруження
перетворюються в аналогову форму
цифроаналоговими перетворювачами 9,
посилюються посилювачами 8 и живлять
статорні обмотки двигуна 7.
Помилки в положенні каретки 4 відносно оброблюваного модульованого світловим променем 13 матеріалу 12 (фотоплівка, формна пластина) можуть виникати через похибки виготовлення гвинтової передачі або привідного крокового двигуна. Система, що розглядається, ці помилки компенсує. Точність роботи системи кадрової розгортки визначається точністю виготовлення дифракційної лінійки.
Вихідною для складання математичної моделі кадрової розгортки є наступне рівняння
 (4.49)
(4.49)
Крутним моментом Мкр у даній системі є момент, створюваний ШД, що працює у синхронному режимі:
 ,
(4.50)
,
(4.50)
Де, як зазвичай, Мm – перевертаючий момент, αе – електричний кут повороту валу ШД, р – число пар полюсів двигуна.
Протидіючий момент Мпрот складається з моменту динамічного, моменту в’язкого тертя та моменту сухого тертя:
 ,
(4.51)
,
(4.51)
де J – приведений до валу двигуна момент інерції рухомих частин, g – коефіцієнт в’язкого тертя.
Підставляючи (4.51) та лінеаризовану залежність (4.50) у (4.49), отримаємо
 ,
(4.52)
,
(4.52)
де
 ,
,
 .
.
В системі, що аналізується, пружністю ходового гвинта можна знехтувати, тому фаза імпульсів зворотного зв’язку буде рівна
 ,
(4.53)
,
(4.53)
де k1 – коефіцієнт передачі гвинтової пари і датчика лінійного переміщення, що визначається кроком ходового гвинта и відстанню між штрихами дифракційної лінійки.
Помилка регулювання ε визначається у контролері, як вказувалося раніше, за правилом
 ,
(4.54)
,
(4.54)
із (4.53) та (4.54) знаходимо
 .
.
Підставляючи останній вираз в (4.52), отримаємо
 .
(4.55)
.
(4.55)