

4.4. Система кадровой развертки в фотовыводных устройствах типа капстан
Кадровая развертка в фотовыводных устройствах капстанового типа осуществляется перемещением фотопленки относительно развертывающего элемента строчной развертки. Функциональная схема системы кадровой развертки этого типа приведена на рис. 4.13.
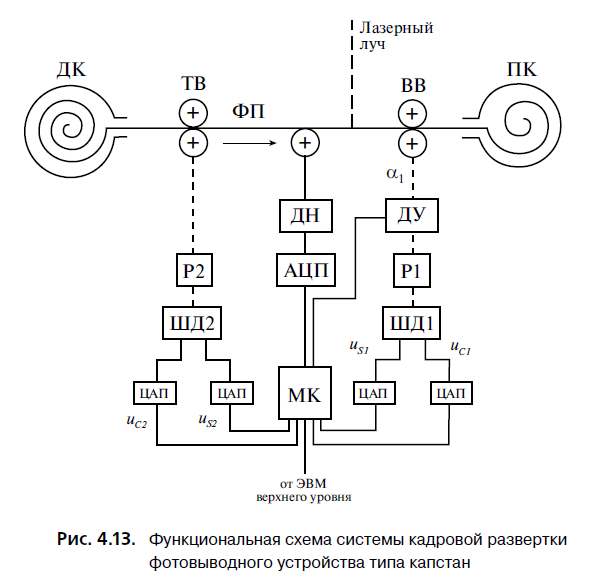
Фотопленка ФП вытягивается из дающей кассеты ДК, проходит через пару тормозных валиков ТВ, затем через пару ведущих валиков ВВ и попадает в приемную кассету ПК. Пленка засвечивается модулированным лазерным лучом, перемещающимся поперек пленки.
В каждом такте работы системы пара ВВ выводит большее количество ФП, чем подает пара ТВ, благодаря этому возникает натяжение ФП силой F в пределах упругой деформации. Сила натяжения измеряется датчиком натяжения ДН, выходной сигнал которого преобразуется в двоичный код АЦП, параллельный двоичный код вводится в управляющий микроконтроллер МК.
Ведущие и тормозные валики приводятся во вращение шаговыми двигателями ШД1 и ШД2 через шариковинтовые редукторы Р1 и Р2. Редукторы являются усилителями момента. В настоящее время не существует ШД приемлемых габаритов, развивающих вращающий момент, достаточный для перемещения пленки, поэтому использование P пока неизбежно. Эти редукторы являются одним из основных источников помехи, приводящей к «полошению» из-за погрешностей изготовления. Для избежания полошения используется система стабилизации скорости перемещения пленки за счет стабилизации угловой скорости угла α1 поворота ВВ. Для измерения истинного значения угла α1 используется датчик угла ДУ, вырабатывающий цифровой двоичный код, который вводится в МК.
Двухфазные шаговые двигатели в рассматриваемой системе работают в синхронном режиме; это означает, что на одну из статорных обмоток двигателя подается напряжение, пропорциональное sinαэ,,а на другую — пропорциональное cosαэ,, при этом магнитный поток
статора будет расположен в пространстве под углом αэ относительно некоторого начала отсчета. Магнитный поток ротора взаимодействует с магнитным потоком статора, в результате ротор занимает такое положение в пространстве, что магнитные потоки ротора и статора совпадают при отсутствии противодействующего момента. Управляя изменением угла αэ во времени, можно обеспечить любое изменение положения ротора. На этом принципе строится система кадровой развертки.
Составим математическую модель объекта управления — кадровой развертки с протягиваемой фотопленкой. Выходными, регулируемыми величинами в этой системе является линейное перемещение пленки
![]() где
α1
— угол поворота ведущего валика, т. е.
угол поворота выходного
где
α1
— угол поворота ведущего валика, т. е.
угол поворота выходного
вала P1, а r — радиус ведущего валика, и сила натяжения F пленки.
Радиус r ведущего валика остается практически постоянным, поэтому вместо выходной величины y принимаем выходную величину

что упрощает построение датчика обратной связи, в качестве которого, как уже указывалось ранее, используется преобразователь угол-код.
В соответствии с третьим законом Ньютона, вращающийся момент Мвр равен моменту противодействующему:
![]() Для
ШД1
Для
ШД1
![]()
где Кр — коэффициент передачи редуктора, Мm — опрокидывающий момент двигателя, p — число пар полюсов, смысл остальных обозначений указан ранее. Противодействующий момент складывается из момента динамического MД, момента вязкого трения МВТ, момента
сухого трения МСТ и момента, создаваемого силой натяжения пленки МН, причем

где J — приведенный момент инерции, g — коэффициент вязкого
трения.