

4.3. Система стабилизации скорости строчной развертки с гистерезисным двигателем
В маломощных приводах, которые используются в системах строчной развертки, бесконтактный двигатель постоянного тока с успехом может быть заменен синхронным гистерезисным двигателем.
Функциональная схема системы стабилизации скорости строчной развертки с гистерезисным двигателем приведена на рис. 4.10.
Ведущим элементом, как и в предыдущей системе, является кварцевый генератор КГ компьютера, из которого выводится изображение. Импульсы КГ проходят через систему фазирования СФ, функционирующую так же, как и в системе, описанной в разделе 4.2. Частота импульсов СФ понижается делителем частоты ДЧ1, выходные импульсы Ug которого вводятся в микроконтроллер МК. В контроллер вводятся также импульсы Uу с дорожки синхронизации датчика обратной связи ДОС.
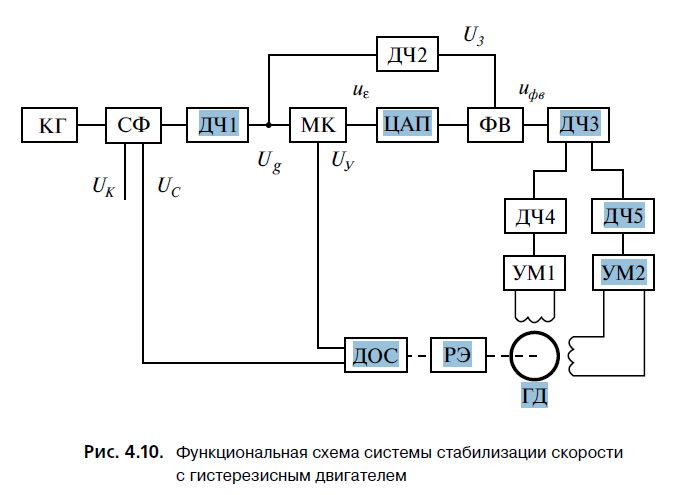
Управляющий контроллер выполняет алгоритм расчета управляющего воздействия uε, которое через ЦАП выводится на управляющий вход фазовращателя (фазового модулятора) ФВ. Запуск ФВ осуществляется выходными импульсами U3 делителя частоты ДЧ2. Фазовращатель, делители частоты ДЧ3, ДЧ4, ДЧ5, усилители мощности УМ1
и УМ2 образуют блок управления гистерезисного двигателя ГД.
Импульсы запуска U3 с выхода ДЧ2 запускают генератор пилообразного напряжения, в момент встречи напряжения пилы с управляющим напряжением вырабатывается импульс uфв на выходе фазовращателя. Импульсы uфв поступают на вход ДЧ3, имеющего коэффициент
деления частоты, равный 2. На выходе ДЧ3 появляется последовательность прямоугольных импульсов, фазовый сдвиг которых пропорционален напряжению u. С разных плеч ДЧ3
снимаются импульсы для запуска делителей частоты на два ДЧ4 и ДЧ5.
На выходах этих делителей появляются последовательности прямоугольных импульсов, сдвинутых друг относительно друга на 90°, фазовое положение которых относительно импульсов U3 пропорционально управляющему напряжению u. Усилители УМ1 и УМ2 убирают постоянные составляющие выходных сигналов ДЧ4 и ДЧ5 и усиливают их по амплитуде и по мощности. Выходные напряжения УМ1 и УМ2 прикладываются к синусной и косинусной обмоткам гистерезисного двигателя. В результате средняя скорость вращения магнитного поля статора ГД является строго постоянной и определяется постоянством частоты следования импульсов U3, которые получаются из выходных импульсов КГ. Вследствие работы ФВ угловое положение вектора поля статора несколько смещается вперед или назад относительно вектора поля ротора, в результате качаний поля статора изменяется угол рассогласования θ, следовательно, изменяется вращающий момент двигателя, компенсирующий изменения противодействующего момента. В результате ротор ГД вращается с постоянной скоростью практически без качаний.
В этом случае фазовый сдвиг импульсов Uу относительно импульсов Ug в среднем равен половине периода следования импульсов Ug,а среднее значение управляющего напряжения u равно половинеамплитуды пилообразного напряжения.
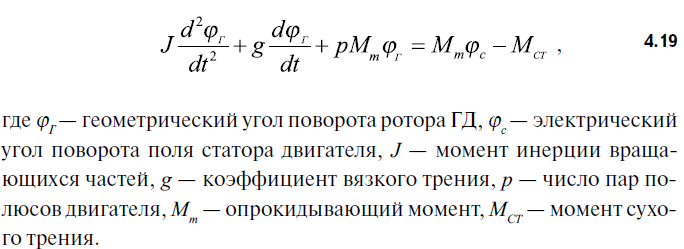
Линеаризованное дифференциальное уравнение гистерезисного двигателя при управлении фазой напряжения питания статора имеет вид [30]:
Системы стабилизации скорости строчной развертки позволяют снизить «качания» вала двигателя (отклонения от идеальной прямой линии) до (1015) угловых секунд, при этом дефект волнистости вертикальных линий составляет единицы мкм и практически не заметен на изображении.