

27. Сила тяжести, центр тяжести, методы определения центра тяжести
Сила тяжести – сила притяжения ТТ.
Центр тяжести – точка приложения параллельных равнодействующих сил тяжести элементарных частиц твёрдого тела.
Практические методы определения ЦТ ТТ:
Метод симметрии
Метод расчленения и отрицательных площадей
1. – если ТТ имеет плоскость симметрии , линия действия силы тяжести будет располагаться в этой плоскости
- если ТТ имеет ось симметрии, линия действия силы тяжести будет совпадать
- если ТТ имеет 2 оси симметрии, то на пересечении осей
2. Плоская фигура разбивается на отдельные части имеющие оси симметрии с известными центрами тяжести.
Xc=

28. Схемы плоских кулачковых механизмов, термины, оценка подвижности
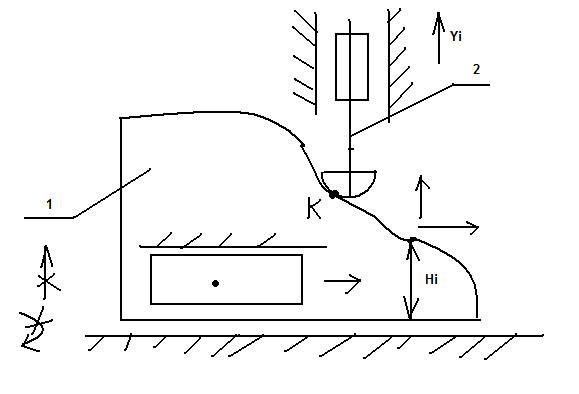
К кулачковым механизмам относятся механизмы, в состав которых входит кулачок, а кулачком называется звено, имеющие элемент высшей пары, выполненный в виде поверхности переменной кривизны. Кулачковые механизмы предназначены для преобразования вращательного или возвратно-поступательного движения входного звена , которым как правило, является кулачок, в возвратно-поступательное или возвратно-вращательное движение выходного звена - толкателя, причём движение толкателя может происходить с остановками заданной продолжительности. Для уменьшения потерь мощности на трение толкатель часто снабжается роликом. Основное достоинство кулачковых механизмов заключается в возможности получения практически любого закона движения толкателя за счёт соответствующего выбора профиля кулачка.
Подвижность механизмов (W) определяется путём сложения связей налагаемых кинематическими парами, входящими в состав данного механизма.
Расчёт подвижности
 i
– число связей налагаемых i-ой КП. Pi –
число КП i-ого класса.
i
– число связей налагаемых i-ой КП. Pi –
число КП i-ого класса.
Формула Чебышева:
 =
3n –
=
3n –

Рассчёт подвижности стержневых механизмов:
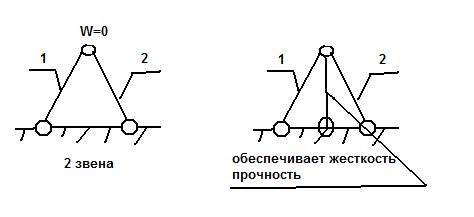
Трёхзвенники W=3*2-3*2=0
 Четырёхзвенники
W=3*3-2*4=1
Четырёхзвенники
W=3*3-2*4=1
КШМ W=3*3-2*3-2*1=1
28. Продолжение
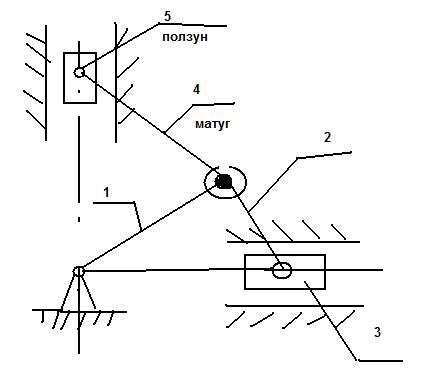
Кулисный механизм W=3*3-2*3-2*1=1 3 – кулиса 2- ползун
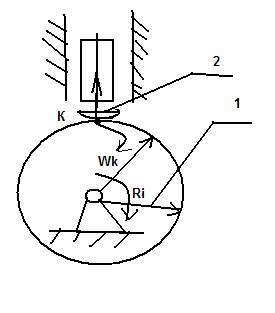
Кулачковый механизм (механизм, у которого одно из звеньев имеет криволинейную форму. W=3*2-2*1-1*1=1
 W=3*3-2*1-2*1-1*1=1
W=3*3-2*1-2*1-1*1=1
Особенности оценки подвижности плоских механизмов
Основные КП: Кулисный механизм W=3*5-2*5-2*2=1
28. Продолжение продолжения
Избыточные связи
В ряде случаев для повышения жёсткости и прочности конструкций вводятся избыточные связи, они не меняют подвижность конструкции.
 W=3*3-2*5=-1
W=3*3-2*5=-1
Мнимые связи – которые не добавляют дополнительной подвижности механизму. Предназначены для повышения работоспособности или улучшения рабочих характеристик механизма.
29. Кинематические характеристики механизмов, передаточное число и отношение, свойства
Входное звено – звено определяющее характер движения всех остальных звеньев механизма
Входная координата – координата определяющая положение всех звеньев механизма.
Закон движения механизмов – зависимость входной координаты от времени
Передаточная функция – математическое выражение описывающее зависимость координаты входного и выходного звена.
Передаточное число – число показывающее во сколько раз меняется одноимённый параметр движения.
Передаточное отношение – алгоритм описывающий характер преобразования движения в механизме.
Передаточная функция:
Xa=l*cosφ
Ya=l*sinφ
ПФ – является основной для кинематического анализа механизмов.
Свойства передаточных отношений:
Передаточное отношение последовательно соединённых механизмов равно произведению передаточных чисел этих механизмов.
При передаче движения в прямом и обратном направлении справедливо отношение I1n=1/in1