1. Понятия теоретической механики: материальная точка, твердое тело, равнодействующая сила
Материальная точка - простейшая физическая модель в механике — абстрактное тело нулевых размеров. Практически под материальной точкой понимают обладающее массой тело, размерами и формой которого в конкретной ситуации можно пренебречь.
Твердое тело - совокупность материальных точек. Основное свойство: абсолютная жесткость, неизменность расстояния между двумя точками.
Равнодействующая сила - сила, действие которой эквивалентно действию на тело нескольких сил. Система сил имеет равнодействующую только в том случае, если для нее существует точка, относительно которой главный момент сил системы равен нулю.
Равнодействующая сила равна геометрической сумме всех сил системы и приложена в центре приведения.
2. Определения и понятия механики: система сил, эквивалентная сила, равнодействующая сила
Система сил – совокупность сил, приложенных к данному телу (или системе тел).
Эквивалентная сила - сила, оказывающая на твердое тело такое же влияние как и предыдущая.
Равнодействующая сила - сила, действие которой эквивалентно действию на тело нескольких сил. Система сил имеет равнодействующую только в том случае, если для нее существует точка, относительно которой главный момент сил системы равен нулю.
Равнодействующая сила равна геометрической сумме всех сил системы и приложена в центре приведения.
3. Понятия: Связь тела, опора, виды типовых опор
Связь тела – ограничение, налагаемое на положения и скорости точек тела в пространстве. Опора – поверхность, на которую опирается тело.
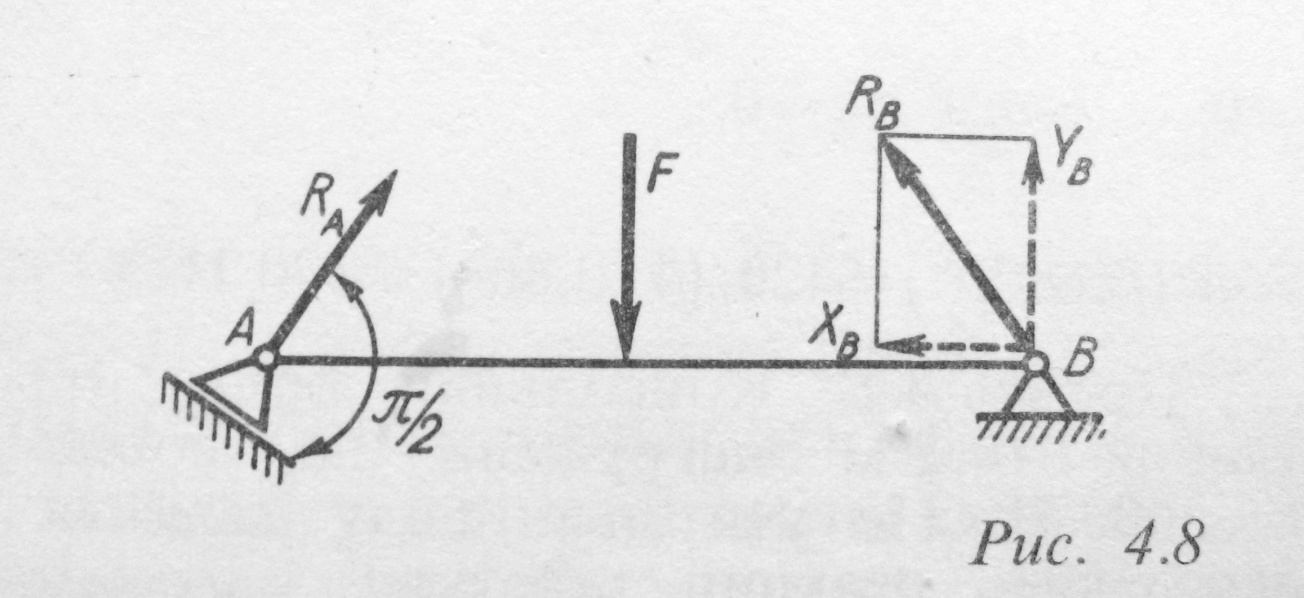
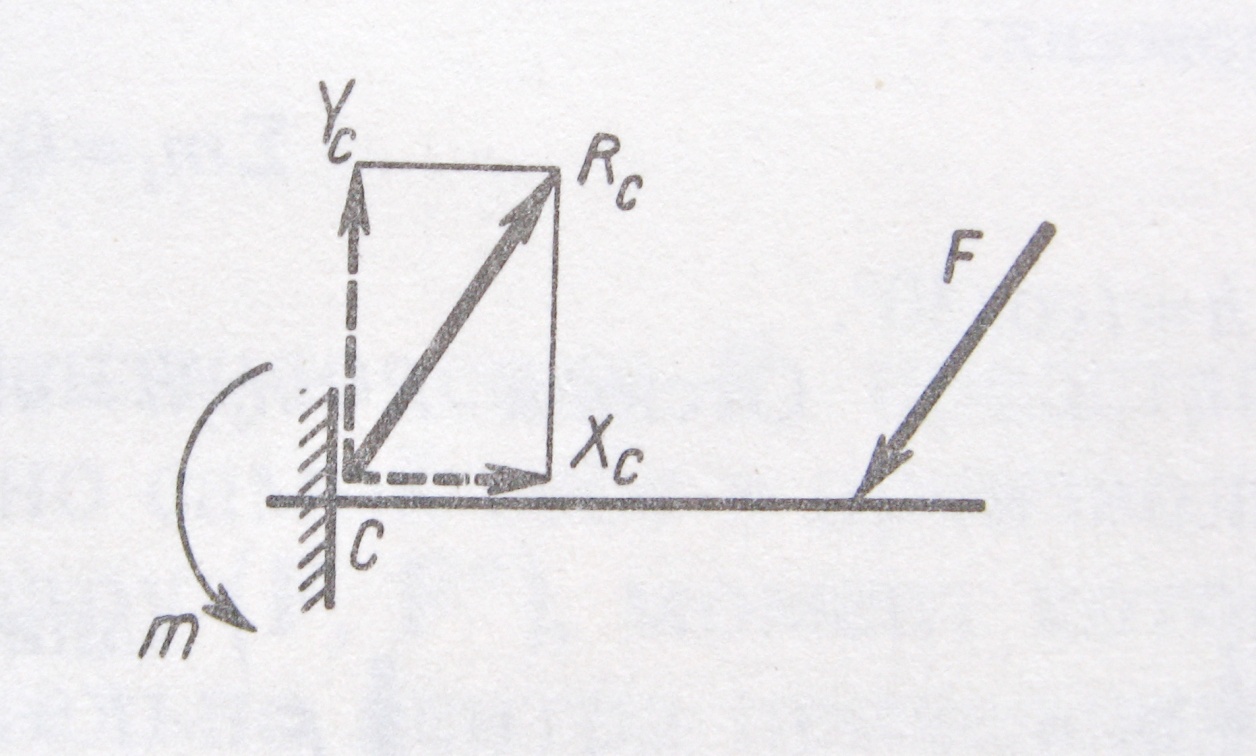
Виды типовых опор: 1) Шарнирно-подвижная опора (НА РИСУНКЕ А) допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. Если пренебречь трением на опоре и в шарнире, то реакция такой связи будет направлена перпендикулярно опорной плоскости и неизвестна только по модулю (одно неизвестное).2) Шарнирно-неподвижная опора (НА РИСУНКЕ В) допускает только поворот вокруг очи шарнира и не допускает никаких линейных перемещений. Реакция такой опоры будет направлена перпендикулярно оси шарнира; модуль и направление её заранее не известны (два неизвестных) Обычно при решении задач такую реакцию разлагают на две взаимно перпендикулярные составляющие, не известные по модулю, но известные по направлению. 3) Жесткая заделка (защемление) (НА РИСУНКЕ С) не допускает ни линейных перемещений, ни поворотов защемленного конца балки.
4. Проекция сил на оси координат, разложение силы по ортогональным осям на составляющие
В тех случаях, когда на тело действует более 3-х сил, так же когда неизвестно направление некоторых сил, удобнее пользоваться методом проецирующей.
Проецирующей силы на ось называется отрезок силы, заключенный между двумя перпендикулярами, опущенными на ось из начала и конца вектора силы. Проецирующей силы на ось есть вел-на алгебраическая, которая может быть положительной и отрицательной, в зависимости от направления. За направление проекции примем направление от проекции начала до проекции конца вектора силы.
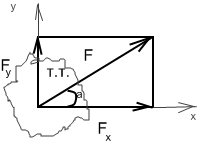
При построении схемы и суммирования сил, принято разлагать их на отдельные составляющие по осям выбранных координат:
|
|
|
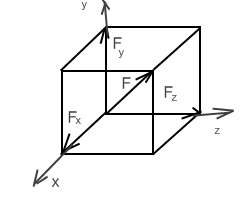
Три ортогональных силы приложенные к одной точке имеют равнодействующую, модуль которой определяется по зависимости:
|