

7.(46) Принципы работы взвешивающих детекторов
Взвешивающие детекторы наиболее привлекательны с точ-ки зрения получения информации как о количестве проходя-щих автомобилей, так и о составе транспортного потока.
Конструкция взвешивающих детекторов содержит, как правило, балку или платформу, встроенную в полотно дороги (рис. 7.2). Опорами для балки служат взвешивающие чувст-вительные элементы. В качестве чувствительных элементов
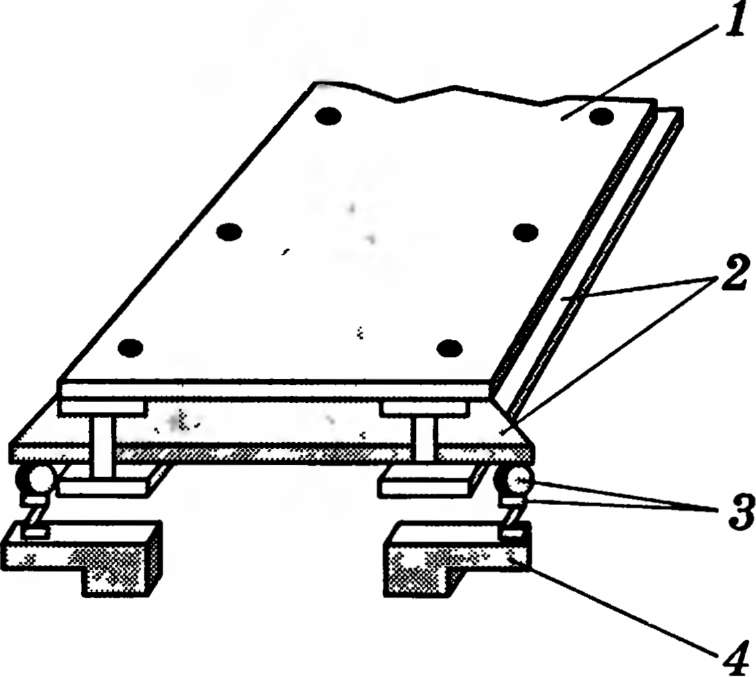
Рис. 7.2. Схема поосевых весов с платформами: 1 — платформа; 2 — рама весов; 3 — шаровая опора; 4 — взвешивающий элемент; 5 — продольный стабилизатор; 6 — поперечный стабилизатор
используют обычно кварцевые (рис. 7.3), пьезоэлектрические (рис. 7.4), тензометрические или магнитоупругие датчики. Тензометрический чувствительный элемент может быть на-клеен на нижнюю поверхность платформы или балки. При наезде автомобиля на платформу сигнал, пропорциональный массе автомобиля (или одной из его осей), поступает во вто-ричную регистрирующую аппаратуру.
Другая разновидность конструкции взвешивающего детек-тора содержит чувствительный элемент, выполненный в виде заполненного жидкостью резервуара, верхняя пластина ко-торого расположена на уровне поверхности дороги. Под на-
грузкой пластина прогибается, давление жидкости воздейст¬вует на мембрану измерительной части, которая замыкает и размыкает контакты, расположенные на различном рас¬стоянии от поверхности мембраны. В цепь каждого контакта включено счетное устройство, оттарированное на соответст¬вующую нагрузку. Сигналы регистрируются автоматически с записью на магнитную ленту.
К недостаткам взвешивающих детекторов следует отнести сложность их установки в дорожное покрытие, разрушение покрытия в местах расположения балок, трудность защиты подвижных узлов от грязи, влаги, снега, замерзания и про¬чих воздействий, тяжелые условия работы чувствительных элементов. Указанные недостатки обусловили ограниченное использование этих устройств.
47.(8 Часть 2) Использование индуктивных петель при учёте интенсивности
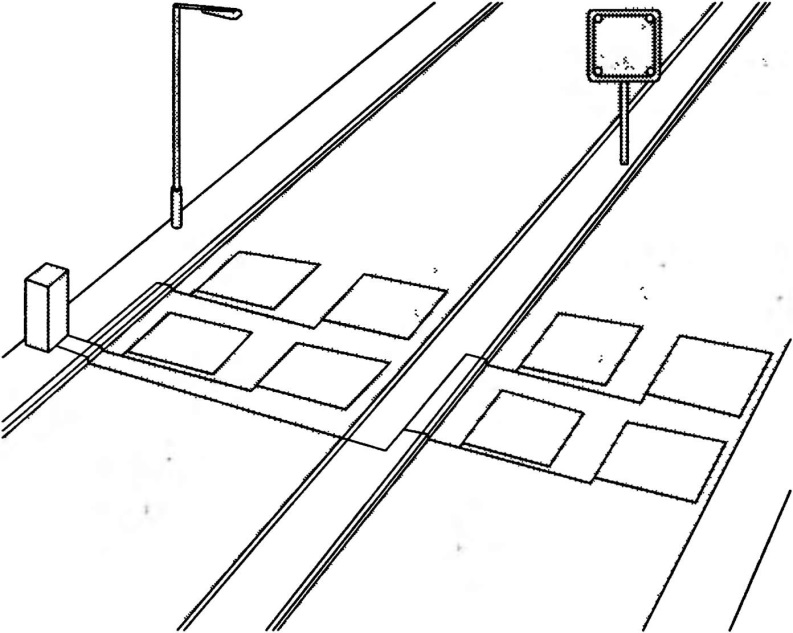
Рис. 7.8. Схема расположения индуктивных петель по полосам
движения автомобильной дороги
Индуктивную петлю включают в колебательный контур генератора высокой частоты, вследствие чего в зоне контура образуется высокочастотное электромагнитное поле. Металлическая масса проходящего автомобиля вызывает изменение индуктивности контура, что может быть зарегистрировано вторичной схемой детектора.
Если рамка располагается по ширине всей проезжей части, то индуктивность ее меняется пропорционально числу одновременно проходящих над ней автомобилей, что может быть зафиксировано схемой измерения.
На рис. 7.9 показана зона фиксации, которая присутствует за границами петли. Вверху изображен легковой автомобиль, который должен въехать в зону фиксации. Внизу показан грузовик, который должен въехать в ту же зону позже, поскольку имеет более высокое шасси. Аналогичные действия происходят, когда транспортные средства покидают зону фиксации: грузовик покинет зону раньше легкового автомобиля. Петли не дают информацию в зависимости от направления движения. Для получения ее необходимо либо добавить еще одну петлю на ту же полосу, либо применить другой тип датчиков.
Петля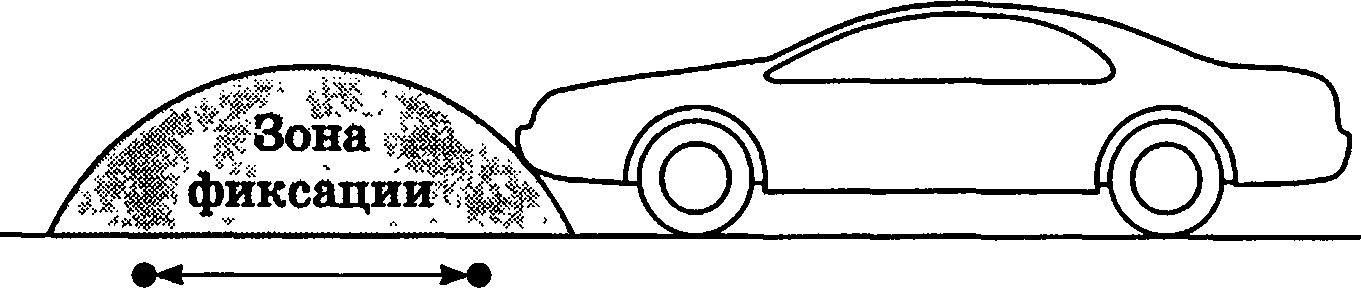
и и
Петля
Рис.
7.9.
Схема фиксации разного типа транспортных
средств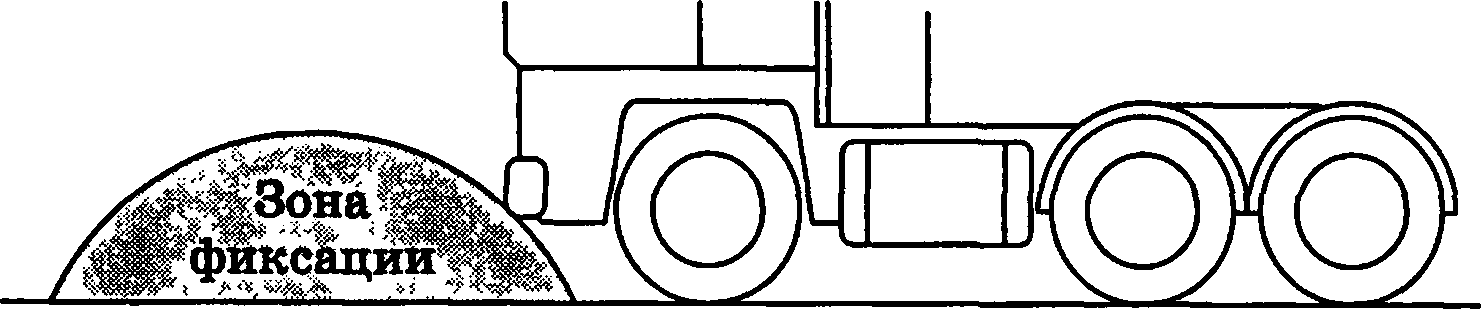
В конфигурациях, где задействовано несколько петель, подключенных к одной плате, каждая петля сканируется последовательно, в то время как другие петли остаются неактивными.