

8.1. Сущность измерения расстояний подвесным мерным прибором
Сущность измерений расстояний подвесными мерными приборами сводится к измерению длины хорды АВ = l0 (рис. 57) с помощью дуги АВ = s цепной линии, которую образует свободно висящая гибкая нерастяжимая тяжелая нить, удерживаемая в равновесии приложенными к ее концам равным силами F (точки А и В лежат на одном уровне). Длина стягивающей хорды мерного прибора при его горизонтальном положении может быть представлена приближенно в виде
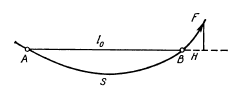
Рис. 57. Схема измерения длины подвесными приборами
![]()
где s – длина цепной линии;
p - вес единицы длины мерного прибора;
H - горизонтальная составляющая силы натяжения мерного прибора.
Если p и H постоянны, и величина хорды l0 будет постоянна. Растяжение мерного прибора под действием силы F будет равно
![]()
где σ - растяжение единицы длины мерного прибора под влиянием веса p,
Длина l0 хорды АВ при положении точек А и В на одной высоте будет согласно формуле (8.1) равна

Формула (8.2) дает нормальную длину хорды при горизонтальном ее положении и натяжении р , называемую длиной мерного прибора.
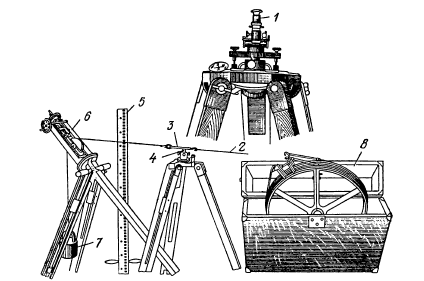
Рис. 58. Базисный прибор БП-2
При измерении расстояний по шкалам производят отсчеты. Если обозначить отсчет по передней шкале буквой П, а по задней буквой 3, то длину интервала, измеренного проволокой, можно подсчитать по формуле
При компарировании на каждый мерный прибор выдается свидетельство, в котором выписывается уравнение прибора при температуре t0
![]()
где l - длина мерного прибора при температуре t и натяжении, равном 10 Н;
l0 = 24 м - номинальная длина мерного прибора;
∆l – поправка за компарирование при темпера-туре t;
α и β - термические коэффициенты расширения прибора.
8.2. Измерение линий светодальномером
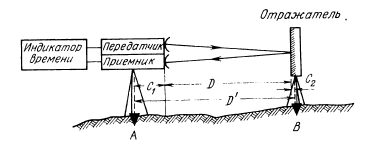
Рис. 59. Схема измерения расстояния
при помощи светодальномера
В момент t1 передатчик, расположенный в пункте А (рис. 59), излучает в направлении к пункту В электромагнитные волны в виде отдельного импульса который затем отражается и в момент времени t2 приходит обратно в пункт А. полагая при этом, что электромагнитные волны распространяются прямолинейно
![]()
И з
формулы (8.4) для определения относительной
ошибки измерения расстояний найдем
з
формулы (8.4) для определения относительной
ошибки измерения расстояний найдем
где τ = t2 – t1;
mD, mv, mτ - средние квадратические ошибки опре-деления величин D, v и τ соответственно.
Найдем с какой ошибкой должны быть определены величины v и τ, если требуется измерить линию длиной D = 1 км с относительной ошибкой 1:400 000 (m = 2,5 мм). Применим к формуле (8.5) принцип равных влияний
![]()
Измерение времени τ может быть выполнено на основе двух методов:
а) при помощи излучения импульсов и приема их после отражения (импульсный или непосредственный метод);
б) по разности фаз посылаемых и принимаемых модулированных колебаний (фазовый, или косвенный, метод).
Гармонические колебания какой-либо величины определяются уравнениями вида
![]()
в![]() которых А амплитуда колебаний; ω
- угловая или круговая частота;
t - время. Величина ωt
называется фазой колебания. Фазы,
отличающиеся друг от друга на величину
2Nπ, (где N
= 0, 1, 2, 3, ...), будут одинаковыми. Фазы,
отличающиеся друг от друга на нечетное
число величин π,
называются противоположными
которых А амплитуда колебаний; ω
- угловая или круговая частота;
t - время. Величина ωt
называется фазой колебания. Фазы,
отличающиеся друг от друга на величину
2Nπ, (где N
= 0, 1, 2, 3, ...), будут одинаковыми. Фазы,
отличающиеся друг от друга на нечетное
число величин π,
называются противоположными
к![]() олебания
происходят в противоположных фазах.
Для любой точки на прямой можно написать
олебания
происходят в противоположных фазах.
Для любой точки на прямой можно написать
где v - скорость распространения колебаний в окружающей среде, образуя волновое поле;
φ0 - начальная фаза в момент времени t = 0.
Выражение вида (8.8) называется уравнением плоской волны гармонического колебания. Колебания высокой частоты характеризуются тремя параметрами: амплитудой, частотой и начальной фазой. Процесс изменения указанных параметров называется модуляцией, она разделяется на амплитудную, частотную и фазовую.
На рис. 60 условно показано распространение колебаний в пространстве вдоль некоторой прямой для двух моментов времени - t1 и t2.
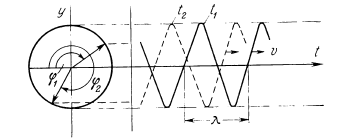
Рис. 60. Схема распространения колебаний
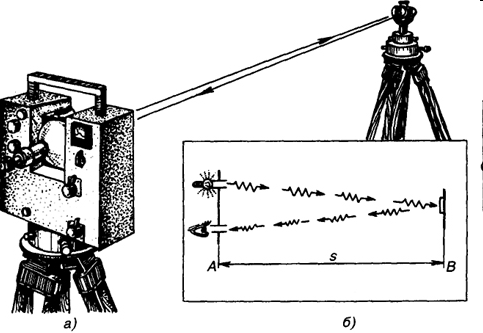
Рис. 61. Светодальномер (а) и ход лучей (б)
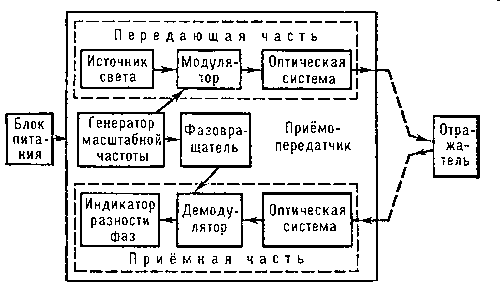
Рис. 63. Блок-схема электрооптического дальномера