

6.4. Требования, предъявляемые к полигонометрии 4 класса, 1 и 2 разрядов
Полигонометрия 4 класса, 1 и 2 разрядов создается в виде отдельных ходов или сетей.
Полигонометрические сети должны содержать избыточное число исходных данных.
Основные показатели полигонометрии 4 класса, 1 и 2 разрядов приведены в табл. 2.
Таблица 2
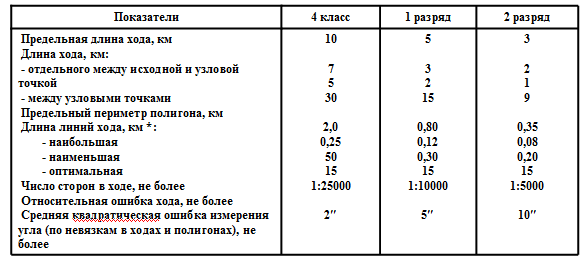
Высоты полигонометрических пунктов должны определяться нивелированием IV класса или техническим. В горной местности при обеспечении съемок с сечением рельефа через 2 и 5 м допускается определять высоты пунктов тригонометрическим нивелированием.
6.5. Действие ошибок угловых и линейных измерений
Допустим, что между двумя пунктами Pн и Pк проложен полигонометрический ход (рис. 1), в котором измерены все n сторон и все (n + 1). левых (или правых) углов. Вследствие измерения углы будут ошибочны на величины dβ1, dβ2, ... , dβ(n+1) и стороны - на величины ds1, ds2, ... , dsn. Исходные дирекционные углы αн, αк и исходные координаты хн, ун и хк, ук известны.
Т![]() огда
в полигонометрическом ходе измеренные
значения углов вместе с исходными
данными позволяют вычислить невязку в
углах fβ.
огда
в полигонометрическом ходе измеренные
значения углов вместе с исходными
данными позволяют вычислить невязку в
углах fβ.
Из формулы (6.1) по правилам теории ошибок получим
![]()
или, предполагая, что углы были измерены равноточно,
![]()
Так как при измерении углов имеют место источники ошибок как случайного, так и систематического характера, то каждая ошибка dβ будет состоять из случайной Δβ и систематической σβ частей:
dβ = Δβ + σβ,
тогда и средняя квадратическая ошибка угла β согласно теории ошибок будет также включать в себя систематическую и случайную части:
![]()
Если считать, что дирекционные углы αн, αк также имеют ошибки, то по (6.1) с учетом выражения (6.2) можно найти
![]()
![]() От
средней квадратической ошибки суммы
углов по формуле (6.2) перейдем к предельной,
которая является ни чем иным, как невязкой
От
средней квадратической ошибки суммы
углов по формуле (6.2) перейдем к предельной,
которая является ни чем иным, как невязкой
пред fβ = пред dβ
П олагая, что пред dβ = 2тβ, запишем
пред fβ = пред 2тβ
Линейная ошибка хода. Для простоты рассуждений положим, что полигонометрический ход имеет вытянутую форму (рис. 24). Для такого хода можно написать
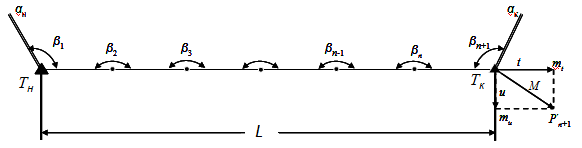
Рис. 24. Вытянутый ход полигонометрии
L = S 1+ S2 + …+ Sn = [S],
где L - расстояние между крайними пунктами Тн и Тк - замыкающая хода.
Ошибка измерения всех линий dL в вытянутом ходе в результате ошибок, допущенных в каждой линии dsi согласно (6.7) будет
dL = ds1 + ds2 + … + dsn.
Переходя к средним квадратическим ошибкам, получим
![]()
Так как при измерении линии действуют источники ошибок случайного и систематического характера и ошибка каждой линии dsi состоит из случайной Δ и систематической σ частей
dsi = Δsi + σsi ,
г![]() де
i = 1, 2, ..., n, то
де
i = 1, 2, ..., n, то
Структура величин mΔ и тσ будет зависеть от метода измерения линий. При измерении линий, например, светодальномером и инварной проволокой она будет совершенно разной.
Е![]() сли
при измерении линий отсутствуют
систематические ошибки, т. е. σsi
= 0, то
сли
при измерении линий отсутствуют
систематические ошибки, т. е. σsi
= 0, то
Систематическим влиянием можно пренебречь и в том случае, если средняя квадратическая систематическая ошибка по своей величине не превышает 1/3 средней квадратической случайной ошибки. Действительно, если принять
![]()
то
т. е. значение ms, если пренебречь систематической ошибкой, уменьшится на 5%. При
![]()
значение ms уменьшится на 2%, следовательно, в этом случае также можно считать, что
![]()