

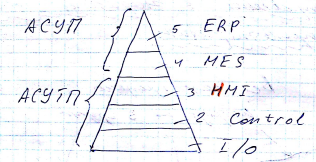
Многоуровневая иерархия АСУ производства электрической и тепловой энергии на АЭС. Разновидности автоматизированных систем управления: АСУП, АСУТП, ИАСУ. Понятие критерия управления АСУТП.
Автоматизированная система управления предприятием (АСУП) — комплекс программных, технических, информационных, лингвистических, организационно-технологических средств и действий квалифицированного персонала, предназначенный для решения задач планирования и управления различными видами деятельности предприятия.
Автоматизированная система управления технологическим процессом (АСУ ТП) — группа решений технических и программных средств, предназначенных для автоматизации управления технологическим оборудованием на промышленных предприятиях. Может иметь связь с более общей автоматизированной системой управления предприятием (АСУП).
Информационная и решающая подсистемы образуют интегрированную автоматизированную систему управление (ИАСУ), которая построена на базе аппаратных средств, их сетей и программного обеспечения. Внутренние и внешние связи в ИАСУ можно представить в виде сложных сетей, отражающих и связывающих физические, информационные и управляющие потоки. Сети, отражающие физические потоки, перерабатывают и содержат данные о движении материальных, трудовых и энергетических ресурсов. Информационные сети обеспечивают разработку технических решений и передачу информации между производственными подразделениями и рабочими местами. Управляющие сети связывают места принятия решений с местами, где эти решения выполняются. ИАСУ предназначена для автоматизированного управления производственными процессами, конструирования изделий, технологической подготовки производства и изготовления изделий с обеспечением технологической подготовки производства и изготовления изделий с обеспечением технологической гибкости, высокой производительности и бесперебойной работы.
ERP (англ. Enterprise Resource Planning, планирование ресурсов предприятия) –система планирования ресурсов предприятия, предназначена для расчета и анализа финансово-экономических показателей , а также для решения административно –логистических задач и тд.
MES (от англ. Manufacturing Execution System, система управления производственными процессами)- нужна для решения задач управления качеством продукции, планирования управления ресурсами предприятия
MMI (man machine interface)- станция оперативного технического персонала. Нужна для опер. управления техн процесс. На этом уровне осуществляется связь оператор-технологический процесс.
Control-средства … управления объектом
I/O-датчики и исполнительные устройства
Для оптимизации процессов прменяют ряд частных критериев:
Поддержание с заданной / необходимой точностью параметров на выходе объекта.
Сведение к минимуму Т, которое соответствует определённому режиму работы.
Сведение к максимуму производительности агрегата при оптимальных параметрах работы этого объекта.
Минимизация расхода сырья /топлва на поизводство энерги
Сведение к минимуму вредных выбросов
Поддержание непрерывного соответствия между потребляемой и вырабатываемой энергией
Минимальная себестомость электроэнерги с учетом надежность и безопасности работы
2. Понятие и структура функционально-группового управления теплоэнергетическим объектом.
 Структурная
схема функционально-группового
управления.
Структурная
схема функционально-группового
управления.
ОП – оператор
БК – блоки коммутации (блок контакта схемы управления, которая воздействует на усилители)
ЛУ – логическое управление
УВК – управляюще-вычислительный комплекс
ТЗ – технологическая защита
ТО – технологический объект
ПП – первичный преобразователь
РО – регулирующий орган
ЗО – запорный орган
Управление сложным объектом связано с проведением большого числа операций по переключению в технологических схемах, вкл/откл регуляторов, по коррекции параметров настройки при переходе с режима на режим. Выполнение вручную перечисленных операций с БЩУ или местного ЩУ достаточно сложная задача в силу большого объема. (например при пуске ЭБ количество таких операций более 400 в час). Для оптимизации все управление блочного оборудования делят на функциональные группы по принципу зависимости от технологии или конструктивных особенностей объектов. Это деление на функциональные группы является условным.
В качестве примера функциональной группы котельной установки:
Питание котла водой,
ФГ подачи топлива,
Группа подачи воздуха и т.д.
Управление объектами выделенной функциональной группы осуществляется по специально разработанной программе группового управления. Эти программы могут меняться в зависимости от режима работы объекта.
Устройство функциональной группы включает следующие операции:
Вкл/откл механизмов собственных нужд,
Откр/закр запорных органов,
Автоматическое регулирование группы и коррекция параметров настройки
Вкл/откл регуляторов
Переключение в контарах системы регулирования
В представленной на рис. схеме ФГУ информация от ПП и БК поступает к оператору и в УВК с помощью системы ЛУ. ФГУ содержит 2 уровня: устройства – 1го уровня ФГУ управляют регулирующими органами и запорными органами, а так же механизмами собственных нужд и т.д. и располагаются непосредственно на объекте. На 2м уровне ФГУ осуществляется формирование команд на включение и отключение оборудования с помощью устройства ЛУ. Кроме того на 2м уровне должна быть предусмотрена ТЗ, предназначенная срабатывать. Если возникают неисправности в оборудовании этой функциональной группы. Переход на управление объектом с помощью ФГУ является на сегодня приоритетным, т.к. позволяет прежде всего сохранить загруженность персонала при пусках и остановах оборудования, а так же при переменных режимах работы.
3. Информационные функции АСУТП энергоблока и электростанции.
Функции АСУ ТП представляют из себя совокупность действий СУ, направленных на достижение частной цели управления.
Все функции АСУ ТП принято делить на 3 группы:
информационные,
управляющие,
вспомогательные.
Информационные функции АСУ ТП объединяет сбор, обработка и представление информации о состоянии объекта управления оперативному персоналу ,передача информации на более высокий уровень АСУ, регистрация информации с помощью различных средств.

ОК – Оперативный контроль. В этой функции осуществляется преобразование физических параметров в сигналы, которые подвергаются последующей обработке. Различают ОК индивидуальный и централизованный.
ТЭП – расчет тепло-экономических показателей, а также других косвенных величин, которые характеризуют качество работы объекта. К расчету ТЭП относятся расчет КПД котла, турбины, ЭБ, расчет удельных расходов топлива на отпуск тепла, электрической энергии и т.д. Для расчета ТЭП утверждается норма отчетности, которая спускается с выше стоящего уровня. Периодичность расчета ТЭП: 15 мин, 8 часов, 24 часа, неделя (редко), месяц, год. Рассчитанный ТЭП позволяет сопоставить фактические показатели качества работы объекта с заданными и утвержденными критериями управления.
ТС – технологическая сигнализация. Эта функция сводится к контролю за состоянием запорных органов и механизмов собственных нужд.
Различают 3 вида ТС:
-предупредительная,
- аварийная,
- технологическая.
Если параметры объекта вышли за допустимые пределы, то должна сработать цветовая или звуковая ТС.
ДИ – достоверность информации. Эта функция предназначена для проверки точности работы информационной цепочки. Реализуется эта функция с помощью дополнительного контроля наиболее важных каналов измерения на объекте. Для этого используются дублирующие приборы, а так же можно использовать расчеты косвенных измерений которые производятся на управляюще-вычислительном комплексе.
Д – диагностика состояния оборудования. Предназначена для достижения целевых назначений:
Требуется определить причину отключения в режиме работы объекта.
Необходимо осуществить прогноз неисправности в состоянии объекта (в качестве аппарата для прогноза используют методы теории вероятности).
Требуется дать прогноз о допустимости эксплуатации объекта при наличии отклонений в режимах работы объекта. В качестве количественного показателя для принятия решений используется разность между текущими параметрами объекта и ожидаемыми параметрами на объекте.
РАП – регистрация аварийных положений. НА объекте ведется специальная регистрация событий и техгнологических параметров в аварийном режиме работы оборудования. (Сброс нагрузки, останов, отключение вспомогательных механизмов и т.д.) Регистрация необходима:
Для обобщения опыта эксплуатации объекта,
Определения экономического ущерба от произошедшей аварии,
Регистрация позволяет предупредить в будущем ошибочные действия персонала. С этой целью в памяти УВК хранится информация о произошедшем аварийном событии и изменении технологических параметров в этот период. Информация зафиксированная в памяти УВК хранится определенное количество времени, до наступления очередной аварийной ситуации
БД – база данных. Формирование БД необходимо для:
Контроля за информацией о работе технологического объекта,
Для обобщения опыта эксплуатации объекта,
Для контроля за документацией о внесении изменения в режим работы объекта,
Получении информации при проектировании новых систем управления.
Для эффективного доступа к БД, а также удобства использования информации разрабатываются СУБД. Назначение СУБД сводится к поиску и анализу, а также обработке необходимой информации которая требуется пользователю.
Информационные функции АСУ ТП станции:
1) Необходимость общестанционного контроля технологических параметров и состояния оборудования.
2) Расчет общестанционных ТЭП. Эта информация используется операторами энергоблоков в ПТО (производственно-технический отдел), а также передается на уровень дирекции станции.
3) Обмен оперативно-диспетчерской информацией с АСУ выше стоящего и нижестоящего уровней.
4. Управляющие функции АСУТП энергоблока и электростанции.
Управляющие функции АСУ ТП предназначены для выработки и реализации управляющего воздействия на объект управления.

ДУ – дистанционное управление. Предназначено для передачи управляющего воздействия от оператора к электроприводам исполнительных механизмов.
АР – автоматическое регулирование. Предназначено для стабилизации технологического параметра на заданном уровне.
ТЗ – технологические защиты. Предназначены для сохранения оборудования при аварийных нарушениях работы агрегатов.
АБ - автоматические блокировки. Предназначены предотвратить аварийные ситуации связанные с ошибочным управлением.
ЛУ – логическое управление. Функция заключается в выработке дискретных сигналов управления на основании логического анализа этих сигналов полученных с объектов (вкл/откл насосов, теплообмен, переключение в контурах системы регулирования и т.д.)
Опт – функция оптимизации. Предназначена для поддержания max или min выбранного критерия управления. Функция оптимизации включает 2 направления: статическая оптимизация, которая предназначена для оптимизации режимов работы объекта и динамическая оптимизация технологических процессов в объекте, rоторая позволяет оптимизировать показатели качества процессов регулированния. (min Y-критерия качества, min Dx – выходной управляемой переменной).
Управляющие функции АСУ ТП на уровне станции:
1) Оптимальное распределение суммарной электрической нагрузки между ЭБ, осуществляется с помощью УВК верхнего уровня (АСУ П).
2) Оптимизация распределения экологической нагрузки
3) Оптимизация выбора состава работающего оборудования. В основе лежит обеспечение задание графика суммарной электрической и тепловой нагрузок при min затрат на выработку энергии.
5. Подсистемы управления второго (нижнего) уровня автоматизации энергоблока АЭС и их назначение
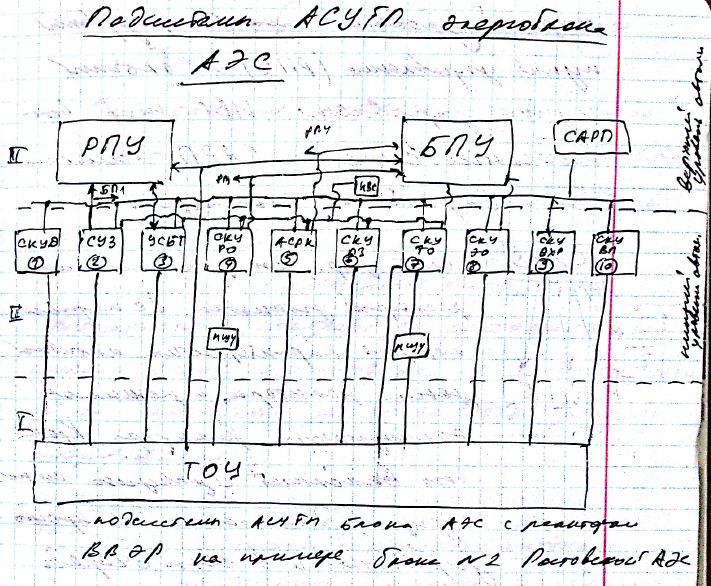
1)СКУД-система контроля, управления и диагностики реакторной установкой. Осуществляет контроль за хар-ми активной зоны реактора и контроль за режимами эксплуатации реактора. Выполняет функцию диагностики, прогнозирования и разделяется на 5 более мелких систем.
А)система внутриреакторного контроля –операт контроль активной зоны
Б) система обнаружения течей теплоносителя
В)система виброшумовой диагностики реактора
Г) система контроля ГЦН и главного циркуляционного контура-обнаруживает предметы в контуре , превыш 50гр
Д) Система комплексного анализа для оперативного контроля за состоянием реакторной установки и всего оборудования с целью прогноза и контроля за выработкой ресурса оборудования
2)СУЗ-система управления и защиты реактора. Контроль плотности нейтронного потока и скорости его изменения. Контроль технических параметров для защиты и управления реактором и мощностью реактора, защита реактора, сигнализация технических параметров.
3)УСБТ-упр система без-ти по технологическим параметрам- реализация функций контроля текущих значений технологических параметров для всех режимов системы контроля. Охватывает 1 и 2 контур энергоблока , выполняет функцию диагностики каналов и технических средств.
4)СКУРО-систем контроля и управления оборудованием реакторного отделения-обеспечивает поддержание основного технического процесса энергоблока в целом совместно с другими подсистемами АСУТП
5)АСРК-автоматическая система радиационного контроля. Обеспечивает оперативный контроль соотв рад. показателей и их нормальных значений.В свою очередь РК представляют подсистемы:
а)радиационный контроль технологический
б)контроль за радиационной обстановкой внутри сооружения АЭС
в)контроль радиационного загрязнения
г)контроль инд. радиоактивных доз
д)контроль радиологической обстановки за пределами станции
6)СКУПЗ-система контроля и управления противопожарной защиты. Тушение и обнаружение пожаров
7)СКУТО- система контроля и управления турбинного отделения. Для контроля и авт. техн процессов во всех режимах работы
8)СКУЭО- система контроля и управления электрической части энергоблока. Контроль и правление энергоблоком и станцией во всех режимах работы
9)СКУВХР- система контроля и управления водно химическим режимом. Теплотехнический контроль параметров воднотехнического режима. Обеспечивает расчет ТЭП по воднотехническому режиму
10)СКУВП- система контроля и управления водоподготовкой. Очистка воды, промывание фильтров…
Принципы автоматического управления технологическим объектом. Управление в режиме «советчика оператора»; супервизорное управление; централизованное цифровое управление на основе ПТК; распределенное цифровое управление
Можно выделить 4 основные разновидности управления объектом с помощью увк:
1)управление в режиме советчика оператора
2)супервизорное управление объектом
3)централиз цифровое управление
4)распределенное цифровое управление
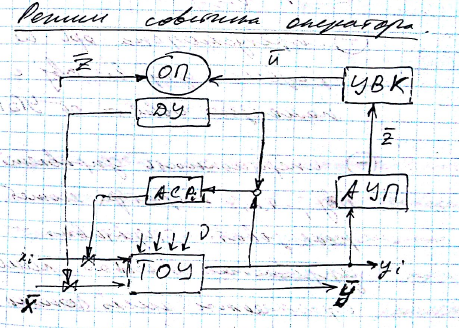
Сигнал z с выхода объекта после преобразования в АЦП поступает на вход УВК, в котором в соответствии с заложенным алгоритмом управления вырабатывает оптимальное решение по управлению объектом. Это решение передается оператору в виде совета. Оператор может воздействовать на объект управления с помощью дистанционного управления или изменяя задания в локальных системах регулирования.
+Предусмотрена оптимизация процессов управления объектом с помощью совета УВК
-инерционность управления объекта.
Использовать лучше всего в базисном или стационарном режиме, когда не требуется перенастройка систем регулирования
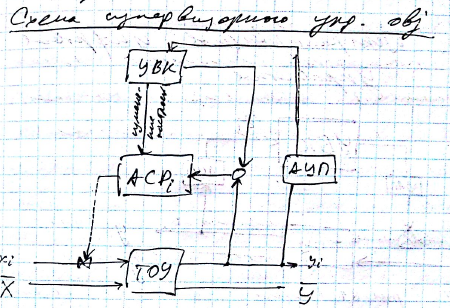
Увк периодически подключается к локальной системе регулирования.
УВК позволяет осуществлять автоматическую коррекцию задания в локальных аср при переходе объекта с 1 режима на другой.
УВК позволяет осуществлять коррекционную настройку параметров локальной АСР
-стат опт
-неэффективность управления из-за распределенности локальных контуров управления
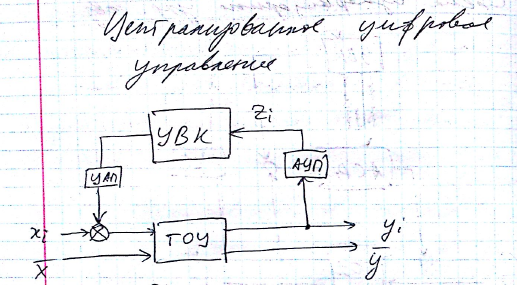
Сигнал через ацп поступает на вход увк,в котором происходит преобразование сигнала с выработкой оптимального решения управления техническим объектом. И далее, через устройство ЦАП осуществляет свое воздействие на объект. Принципиальное отличие –отсутствие локальных систем регулирования нижнего уровня. Т.е. сигнал на исп механизме пост непосредственно с увк.
+отсутствие лишнего звена в системе передачи сигнала управления
+появляется возможность формировать более сложный закон регулирования, кроме типовых П,ПИ, ПИД.
+появляется возможность использовать при управлении объектом одновременно двух принципов :по отклонению и по возмущению, а также изменение алгоритмов управления в зависимости от информации, поступающей на увк
-низкая надежность отдельных элементов системы, что может привести к потере управления объектом в пределах единой асутп.
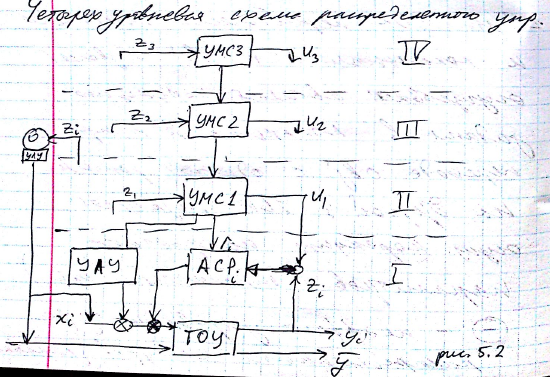
характеризуется наличием нескольких умс.
Такой подход обычно применяют при выделении функциональной группы. на рисунке выделены 4 уровня, назначение каждого из которых:
1)локальная система регулированияb стабилизации техн параметров АСР, кот исп типовые законы регулирования. На этом уровне находится УЛУ,возд на который происходит из уровня 2, отУМС1
2)УМС1 выполняет функцию статической и динамической оптимизации объекта. Статическая-коррекция задания И1
Динамическая- коррекция настроечных параметров r1
Уровень УМС 1 позволяет :
изменять задание локальным АСР
Осуществлять коррекцию настройки параметров регулятора
Осуществлять перевод объекта с 1 режима работы на другой, за счет переключения регулятора и запорных органов с помощью УЛУ
Допустимо вмешательство оператора
3) этот уровень общеблочный
осуществляет оптимизацию общеблочных параметров и режимов работы объекта
4) общестанционный уровень. оптимизация технологических процессов в предела всей электростанции. Это возможно за счет перераспределения электрической и тепловой энергии, перераспределения экологической нагрузки , оптимальный выбор состава работающего оборудования
+УМС на на разных уровнях могут действовать более-менее автономно, что ведет к увеличению надёжности системы.
-система дороже и сложнее
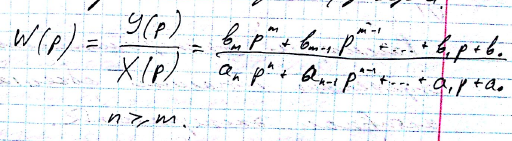
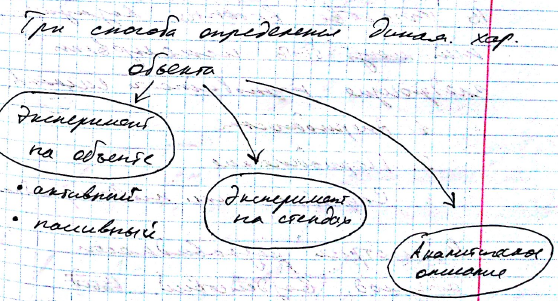
Математические модели динамика объектов управления и методы их определения. Понятия статической и динамической оптимизации технологических объектов управления: методы решения.
Все энергетические объекты являются динамическими и для расчета систем регулирования требуются знания их математических моделей. Введем допущение, что рассматриваемый объект является линейным с сосредоточенными параметрами. Т
Опишем переходные процессы с помощью линейных дифференциальных уравнений

у-выходная переменная с порядком дифференцирования n
х-входная переменная с порядком n,
коэф bm bnи тд константы
Перейдем к передаточной функции
Статическая оптимизация имеет цель определить экстремум целевой функции в зависимости от переменных факторов х и управляющих воздействий. при этом хi и ui не являются функциями времени
Специфика:
обычно целевая функция имеет экстремальную характеристику в зависимости от хi и ui
необходимо учитывать ограничения, накладываемые на факторы и управляющее воздействие
Динамическая оптимизация имеет цель определить такие значения хi и ui,при которых достигается макс критерий управления объектом.
хi и ui являются функциями времени. В качестве методов статической оптимизации используют:
прямой метод оптимизации
метод множителей лагранжа
Энергоблок с реактором ВВЭР, как объект управления
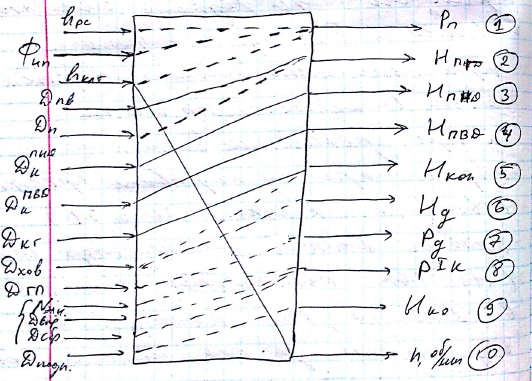
Регулируемые величины:
Рп-давление пара перед турбиной. Стабилизируется за счет изменения мощности реактора с помощью перемещения регулировочных стержней системы управления и защиты реактора hрс. Для более качественной стабилизации дополнительно изменяется сигнал изменения плотности нейтронного потока Фнп. Этот режим называется регулировочным.
Второй вариант регулирования давления –базовый, за счет положения клапанов турбины hклт
Стабилизация уровня в ПГ за счет изменения расхода питательной воды. Изменение расхода питательной воды осущ с помощью изменения частоты турбопитательного насоса и регулировочного клапана.
3,4) Нпнд, Нпвд-уровень в подогревателях. стабилизируется за счет слива конденсата.
Нкон-уровень воды в конденсаторе. За счет слива конденсата из конденсатора Dкт. используется трёхходовой клапан.
Нд-уровень воды в деаэраторе. стаб уровня осуществляется за счет изменения подачи химически очищенной воды(в ряде схем добавляется в деаэратор, в ряде схем-в конденсатор) Dхов
Рд-давление в деаэраторе. за счет отбора из турбины
РIк-стабилизация давления первого контура. за счет компенсатора обема(Nэлн, Dвпр, Dсбр)
Нко-изменение уровня в компенсаторе объёма за счет Dподп
nоб/мин-частота вращения турбогенератора. За счет воздействия на рег клапан турбины hклт
9. Регулирование мощности энергоблока аэс
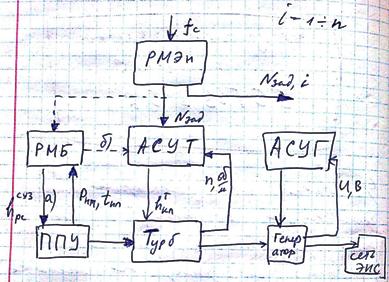
РМЭн – регулир мощности эн системы
РМБ – регулир мощности блока
АСУТ – регулир мощности АСУ турбиной
АСУГ - -||- генератором
ППУ – паропроводящая установка (реактор + ПГ)
Система регулирования мощности энергоблока включает в себя РМБ, который реагирует на изменение давления и t пара перед турбиной, АСУТ – входной сигнал по частоте вращения турбины, АСУГ – с входным сигналом по напряжению на шинах генератора.
Несоответствие между мощностью турбины и мощностью ППУ ведет к отклонению давления и температуры насыщенного пара перед турбиной. Это отклонение может быть устранено с помощью РМБ. Для этого РМБ воздействует: а) на мощность ППУ за счет изменения положения регулирующих стержней реактора, б) воздействие на АСУТ, которое приводит к тому, что РМЭн должен изменить задание регулятору блока.
Мощность турбины зависит от давления насыщенного пара перед турбиной и может быть изменена за счет воздействия на положения регулирующего клапана турбины. Это положение устанавливают в соответствии с поступающим сигналом по частоте вращения ротора турбины. В зависимости от степени участия энергоблоков в регулировании частоты в сети можно выделить 2 режима работы блоков:
Базисный режим работы – в этом режиме вырабатываемая мощность не зависит от отклонений частоты в энергосистеме
Регулирующий режим – режим при котором выработка мощности зависит от частоты в энергосистеме. Регулирующий режим предусматривает режим статического и астатического регулирования.
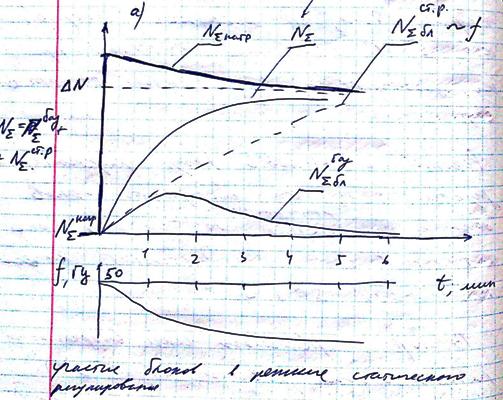
Режим статического регулирования частоты характеризуется тем, что мощность энергоблоков в ЭС должна меняться пропорционально отклонению частоты.
Режим астатического регулирования характеризуется тем, что мощность энергоблоков должна изменяться до тех пор пока частота в сети не достигнет своего номинала 50 Гц.
Выбор первичного(статического) или вторичного(астатического) регулирования зависит от ТЭП блока и ЭС.
Статическое регулирования
![]() -
суммарная мощность, вырабатываемая
блоками
-
суммарная мощность, вырабатываемая
блоками
При статическом режиме каждый из блоков может работать в одном из следующих режимов:
Базисный
Статического регулирования, при котором с увеличением нагрузки частота в сети падает и это приводит к росту мощностей блоков, работающих в режиме статического регулирования.
Режим статического регулирования осущ-ся за счет работы РМБ.
Астатическое
и статическое регулирование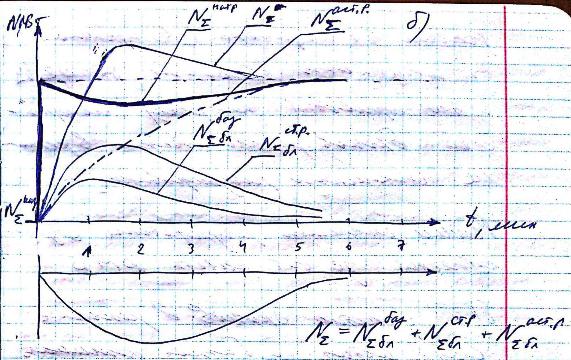
При достижении нагрузки потребителей, равной вырабатываемой мощности, частота сети возвращается к исходному. При этом блоки, работающие в режиме статического регулир изменяют свою мощность пропорционально частоте, т.е. при некотором отклонении возвращаются к исходному значению, а блоки, работающие в режиме астатического регулир переходят на новый . Режим астатич регулирования может быть осуществлен с помощью регулирования мощности энергосистемы, при этом он изменяет задание каждому из энергоблоков энергосистемы
10. Регулирование параметров даэраторной установке.
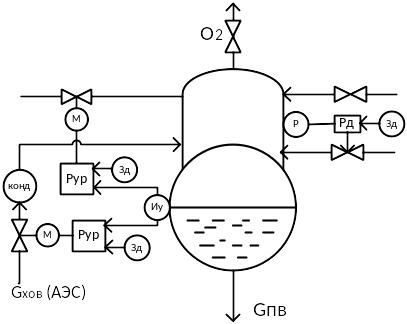

Даэратор предназначен для удаления в питательной воде кислорода. Подвод греющего пара осуществляется в нижнюю часть даэраторной головки. Поток пара стремясь к выходу в атмосферу в верхней части головки Д. нагревает, движущуюся ему на встречу питательную воду до температуры кипения. В процессе кипения из воды выделяется содержащийся в ней кислород (О2) и далее вместе с излишками пара сбрасывается в атмосферу или в расширитель.
Система регулирования уровня в 1м контуре. Входным сигналом является уровень в даэраторе. Динамика объекта может быть аппроксимирована И-звеном или И-звеном с запаздыванием и следовательно алгоритм регулирования должен быть выбран из числа П или ПИ. Стабилизация уровня осуществляется за счет воздействия регулятора на расход холодной воды.
В случае АЭС регулятор уровня воздействует на расход химически очищенной воды, поступающей далее в конденсатор турбины, а после конденсатора через серию установок, в частности в ПНД поступает в даэратор.
Для ТЭС регулируется уровень воздействием на расход химически очищенной воды, поступающей непосредственно в верхнюю часть даэратора.
АСР давления также 1 контурная система. Входной сигнал – давление в верхней части головки Д. и стабилизация давления осуществляется за счет воздействия регулятора на расход греющего пара из отбора турбины. Динамика объекта по каналу давления при возмущении греющим паром может быть аппроксимирована звеньями для объекта с самовыравниванием (комбинация А и З), а следовательно используются регуляторы П, ПИ, ПИД.
11. Регулирование уровня в конденсаторе турбины.
|
1 - конденсатор 2 - линия рециркуляции 3 - трехходовой клапан 4 - конденсатосборник 5 - уровнемер 6 - регулятор уровня 7 - конденсатный насос 8 - холодильники пара пароструйных эжекторов 9 - магистраль питательной воды
|
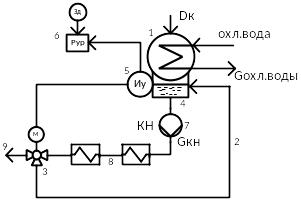
АСР системы уровня в конденсаторе турбины.
Конденсаторный насос 7 откачивает воду из конденсатосборника, при этом температура воды близка к температуре насыщения, что может вызвать явление кавитации при работе КН, что бы избежать этого требуется поддерживать постоянным расход после конденсаторного насоса (Gкн=const) для всех режимов работы ЭБ. И этот расход не должен зависеть от расхода пара из турбины в конденсатор (Dк). Требуется поддерживать уровень в конденсатосборнике регламентированным в пределах ±ΔH. При снижении уровня в конденсатосборнике снижается давление на всасе в КН, что приводит к явлению кавитации. Превышение уровня больше допустимого в конденсатосборнике ведет к затоплению части теплообменной поверхности конденсатора и как следствие снижению экономической эффективности блока, что бы избежать перечисленных замечаний по снижению и увеличению уровня вводится линия резервирования и трехходовой клапан.
Регулятор уровня 6 получает сигнал по уровню в конденсатосборнике и воздействует на трехходовой клапан. При этом при любом положении трехходового клапана расход воды Gкн является постоянным, но при этом меняется соотношение расходов через линию рециркуляции 2 и магистраль питательной воды 9. При этом должно быть обеспечено выполнение условие – расход питательной воды в магистрали 9 должен быть равен сумме расхода химически очищенной воды поступающей в конденсатор и расходу пара из турбины в конденсатор.
12. Регулирование уровня воды в подогревателях низкого и высокого давления.

Рис. Принципиальная схема регулирования уровня в ПНД
Снижение уровня в подогревателе ведет к нарушению работы насоса откачивающего конденсат, а увеличение уровня выше допустимого может привести к нарушению теплообмена, а так же к возможности вскипания воды и аварийному забросу паро-водяной смеси в турбину.
В подогревателях, как низкого, так и высокого давления, конденсат и питательная вода подогреваются паром из не регулируемых отборов турбины, причем для 2х подогревателей (2 и 4) конденсат отводится в паровое пространство предыдущих подогревателей, те из 2 в 1, из 4 в 3, а для системы регулирования уровня в ПНД-1 и ПНД-3 конденсат отводится в питательную линию. С точки зрения динамики, может быть аппроксимировано И-звеном или И-звеном с запаздыванием, т.е. имеем дело с объектом без самовыравнивания и выбираем закон регулирования П или ПИ. Стабилизация уровня осуществляется за счет воздействия регулятора на регулировочные дроссельные клапаны, расположенные на линии сброса конденсата из подогревателя.