

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Уфимский государственный технический университет»
Кафедра автоматизации производственных процессов
Курсовой проект
По курсу
«Теория систем»
Вариант-9
Выполнил: ст. гр.
Проверил: Гаевская О.И.
Уфа 2013
Содержание
Выделение подсистем на основе некоторой меры.……..……………….3
Построение графа………………………………………………….. 4
Определение матриц смежности, инцидентности и контуров…..4
Определитель системы…………………………………………….. 5
Определитель передаточной функции из узла Х в узел Y…..……5
Выделение 2-3 несвязанных контура …………………………….6
Расчет изменения энтропии системы…………………………...…7
Определение типа шкал измерений……………………………………...9
Определение порядка проведения работы……………………………..10
Построение моделей системы……………………………………………14
Анализ иерархий……………………………………………….................15
5.1. Составление матрицы критериев………………………………....15
5.2. Определение приоритетов альтернатив…………………………..18
Список используемой литературы…………………………...............................19
Приложения
Цель курсового проекта.
Целью курсового проекта является комплексная проработка системотехнических аспектов разработки сложных систем.
Студенты должны получить практические навыки, необходимые для применения основных понятий системного анализа.
1 Выделение подсистем на основе некоторой меры
Исходной информацией для выполнения данной части является структура системы в виде взвешенного ориентированного графа, соответствующего варианту (таблица 1).
Таблица 1 – Дуги графа
Вариант № 9 |
Дуги графа |
|
||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
||
х = 1 |
Исх. Вх. |
1 2 |
2 3 |
2 4 |
2 1 |
3 6 |
4 5 |
5 4 |
5 6 |
6 7 |
7 1 |
7 3 |
|
|
у = 6 |
Вес |
0,8 |
0,2 |
0,1 |
-0,9 |
0,3 |
0,8 |
-0,9 |
0,2 |
-0,9 |
0,4 |
0,5 |
|
|
Для заданной системы требуется:
- построить граф системы;
- определить матрицы смежности, инцидентности и контуров;
- найти определитель системы;
- определить все элементарные пути из узла х в узел у;
- определить передаточную функцию системы по пути от х к у по формуле Мезона;
- выделить 2 – 3 несвязных контура как подсистемы и определить их связность;
- рассчитать изменение энтропии системы и вероятности нахождения в каждом из узлов.
Указание 1: Считать, что интенсивности переходов системы из одного состояния в другое равны весам дуг, взятых по модулю.
Указание 2: Первоначально считать, что все состояния системы равновероятны.
1.1. Построить граф системы
По исходным данным строится граф системы (рисунок 1). Матрица смежности определяется как матрица размером nn, где n – количество вершин графа.
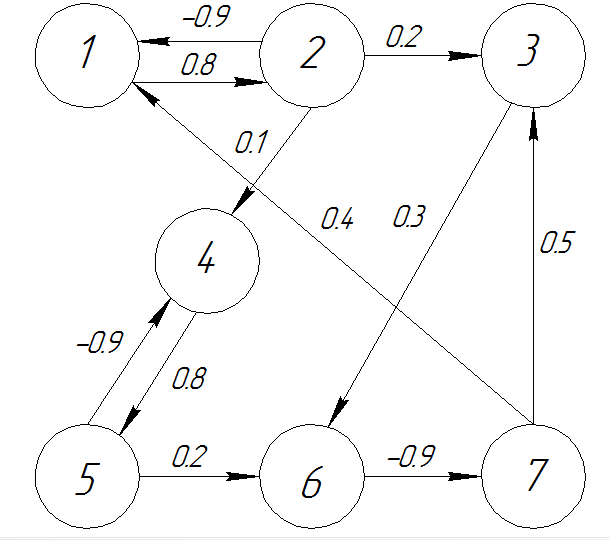
Рисунок 1 – Граф системы
1.2. Определить матрицы смежности, инцидентности и контуров.
Матрицы смежности, инцидентности и контуров определяется по графу системы и имеют вид:
Таблица 2 – Матрица смежности
|
V1 |
V2 |
V3 |
V4 |
V5 |
V6 |
V7 |
V1 |
|
1 |
|
|
|
|
1 |
V2 |
1 |
|
|
|
|
|
|
V3 |
|
1 |
|
|
|
|
1 |
V4 |
|
1 |
|
|
1 |
|
|
V5 |
|
|
|
1 |
|
|
|
V6 |
|
|
1 |
|
1 |
|
|
V7 |
|
|
|
|
|
1 |
|
Таблица 3 – Матрица инцидентности
|
R12 |
R24 |
R45 |
R56 |
R67 |
R73 |
R36 |
R71 |
R21 |
R54 |
R23 |
V1 |
1 |
|
|
|
|
|
|
-1 |
-1 |
|
|
V2 |
-1 |
1 |
|
|
|
|
|
|
1 |
|
1 |
V3 |
|
|
|
|
|
-1 |
1 |
|
1 |
|
-1 |
V4 |
|
-1 |
1 |
|
|
|
|
|
|
-1 |
|
V5 |
|
|
-1 |
1 |
|
|
|
|
|
1 |
|
V6 |
|
|
|
-1 |
1 |
|
-1 |
|
|
|
|
V7 |
|
|
|
|
-1 |
1 |
|
1 |
|
|
|
Матрица контуров определяется по количеству контуров графа (рисунок 4).
Табица 4 – Матрица контуров
|
R12 |
R24 |
R45 |
R56 |
R67 |
R73 |
R36 |
R71 |
R21 |
R54 |
R23 |
K1 |
1 |
1 |
1 |
1 |
1 |
|
|
1 |
|
|
|
K2 |
|
|
|
|
1 |
1 |
1 |
|
|
|
|
K3 |
|
|
1 |
|
|
|
|
|
|
1 |
|
K4 |
1 |
|
|
|
|
|
|
|
1 |
|
|
K5 |
1 |
|
|
|
1 |
|
1 |
1 |
|
|
1 |