

Тема 1.3 Выбор законов регулирования на объектах, расчет и установка параметров настройки регуляторов.
1.3.1. Автоматическая система управления и её элементы.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления рис 1.64.

Рис.1.64. Система автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.
1.3.2.Разработка асу.
Факторы, определяющие необходимость системного подхода к разработке АСУ:
Многосвязность процессов и задач.
Необходимость обеспечения взаимодействия система различного уровня.
Большое количество случайных факторов.
Разнообразие критериев, использованных на различных уровнях.
Необходимость обеспечения информационной, программной и технической совместимости с др. системами.
Создание любой системы:
Выделение проблемы.
Определение цели функционирования систем.
Выбор и определение критериев для сравнения вариантов.
Формализация процессов и задач на математическом уровне.
Декомпозиция системы на подсистемы и компоненты рис 1.65.
Разработка компонент.
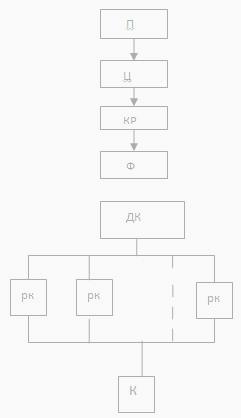
Рис.1.65. Композиция компонент.
Классический индуктивный подход состоит в строго последовательном выполнении всех этапов и простом суммировании компонент на этапе композиции. Такая разобщённость решения задач при разработке АСУ недопустима. Особенность системного подхода состоит в совместном и взаимосвязанном решении всех этапов разработки АСУ.
Принципы СП при разработке АСУ:
- зависимость и автономность;
- качественное различие целого и части;
- иерархичность исследования, при котором сама система исследуется как элемент более широкой системы;
- интеграция исследования, заключается в изучении общих свойств и закономерности систем;
- формализация исследования, т.е. получение количественных характеристик.
Исследование и разработка АСУ осуществляется в 2 этапа:
1.Макропроетирование.
2.Микропроектирование.
Макропроектирование рис.1.66.(цель создания, концептуальное и логическое проектирование) и микропроектирование (средства реализации системы, физическое проектирование).

Рис.1.66. Блок-схема этапов проектирования.
Системный подход базируется на системном анализе, который включает следующие группы методов:
Эвристическое программирование – методы экспертных оценок, которые основаны на математическом обеспечении мнений группы экспертов.
Семиотический подход – употребление средств естественного языка для описания объектов и их свойств.
Аналитические методы – мат. методы теории исследования операций и ТПР.
Имитационное моделирование – средства исследования АС. Имитируется модель и деятельность системы.
ГОСТ 34.601-90 – определяет стандарты технологических стадий и этапов создания экономических информационных систем.
Стадия 1: Формирование требований к системе.
Стадия 2: Разработка концепции системы.
Стадия 3: Техническое задание.
Стадия 4: Эскизное проектирование.
Стадия 5: Технический проект.
Стадия 6: Рабочая документация.
Стадия 7: Ввод в действие.
Стадия 8: Сопровождение системы.
Стадия 0: Оценка реализуемости.
Стадия 1: Предпроектное обследование.
Стадия 2: Выбор варианта автоматизации.
Стадия 3: Разработка технического задания.
Стадия 4: Выбор варианта тех. реализации.
Стадия 5: Разработка проекта.
Стадия 6: Физическое проектирование.