

Ход работы: Теоретические сведения.
Мембранный дифманометр системы ГСП.
Мембранный дифманометр системы ГСП представляет собой измерительный преобразователь разности давлений с унифицированным выходным параметром взаимной индуктивности.
Мембранные дифманометры предназначены для применения в качестве: расходомеров - для измерения расхода жидких и газообразных сред по перепаду давления в сужающем устройстве; расходомеров - для измерения разности давлений, а также вакуумметрического и избыточного давления; уровнемеров – для измерения уровня жидкости, находящейся под атмосферным, избыточным или вакуумметрическим давлением.
Дифманометры работают в комплекте с взаимозаменяемыми измерительными дифференциально - трансформаторными приборами и другими устройствами, способными принимать стандартный параметр в виде взаимной индуктивности.
Выходными параметрами дифманометров типа ДМ являются взаимная индуктивность с диапазоном 10-0-10 мГ или 0-10 мГ, а также постоянный ток с диапазоном 0 - 5 мА и 4 -20 мА.
Электрическое питание первичной обмотки дифференциально-трансформаторного преобразователя дифманометра осуществляется переменным током 125 мА от измерительного прибора, в комплекте с которым работает дифманометр. Частота тока питания (50 ± 1) или (60± 1) Гц. Предельные номинальные перепады давления дифманометров устанавливаются при сообщении "минусовой” камеры с атмосферой и прит создании перепада давления
путем подачи избыточного давления в "плюсовую" камеру. В зависимости от модели и исполнения они составляют от 1,6 до 25 кПа и от 0,04 до 0,63 МПа.
На рис. 1.55 приведена типовая схема мембранного дифманометра системы ГСП.

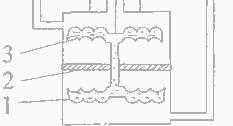
Рис.1.55 Типовая схема мембранного дифманометра системы ГСП.
Внутренние полости мембранных коробок соединены между собой и заполнены рабочей жидкостью дистиллированной водой.
Мембранная коробка 1 размещается в “плюсовой” рабочей камере дифманометра, а мембранная коробка 3 - в “минусовой” камере. "Плюсовая” и "минусовая" камеры разделены диафрагмой 2.
Профили мембран в каждой мембранной коробке совпадают по направлению. Если фактический перепад давления превысит предельный номинальный перепад давления дифманометра, то мембранная коробка 1 в "плюсовой" камере сложится по профилю и вода из нее перетечет в мембранную коробку 3 "минусовой" камеры.
Под действием разности давлений Р\ ~ Рг мембранная коробка 1 сжимается и вода из нее перетекает в мембранную коробку 3, которая расширяется. Вследствие этого центр верхней поверхности мембранной коробки 3 перемещается вверх. Деформация мембранной коробки 3 через поводок 4 вызывает перемещение сердечника (плунжера) дифференциально-трансформаторного преобразователя 5. При этом изменяется значение выходного параметра преобразователя в виде параметра взаимной индуктивности.
Предел допускаемой основной погрешности дифманометров в процентах от предельного номинального перепада давления равен 1 % для дифманометров класса точности 1;1,5 % для дифманометров класса точности 1,54; 2,5 % для дифманометров класса точности 2,5.
Вариация выходного параметра не превышает значения предела допускаемой основной погрешности.
Выходной параметр в виде изменения взаимной индуктивности 0-10 мГ.
В таблице 1 приведены значения предельного номинального перепада давления дифманометров системы ГСП.
Таблица
11
Модель
Предельный
номинальный перепад давления
Чувствительный
элемент
кПа
кгс/м2
кПа
МПа
кгс/см*
1,6
160
23573
2,5
250
Мембранный
23574
4,0
400
-
-
-
блок
из двух
(измеряемая
6,3
630
мембранных
среда
- газ)
10
1000
коробок
16
1600
25
2500
23573
0,04
0,4
23574
0,063
0,63
23582
-
-
-
0,1
1,0
Мембранный
(измеряемая
0,16
1,6
блок
из двух
среда
- газ,
0,25
2,5
мембранных
водяной
пар,
0,4
4,0
коробок
жидкость)
0,63
6,3
23578
6,3
630
Мембранная
16
1000
-
-
-
коробка
25
1600
2500
1600
40
1.0
0,4
2500
63
1,6
0,63
100
1,0
Мембранный
160
1,6
блок
из двух
23579
250
2,5
мембранных
400
4,0
коробок
630
6,3
10
I
16
I
Лабораторная работа № 14 «Поверка комплекта дифманометра системы ГСП и вторичного прибора»
Цель работы: Провести поверку дифманометра системы ГСП и вторичного прибора.