

2.Динамическая погрешность
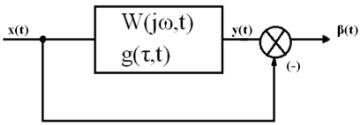 W(jωt)
– общая нестационарная передаточная
ф-ия, g(τ,t)
– импульсная. Динамическая
погрешность – разность между выходными
и входными величинами при отсутствии
других погрешностей. β(t)=y(t)-x(t).
Если есть изменяющийся во времени
входной СП, то есть динамическая
погрешность. Для стационарного процесса:
Mβ(t)=
W(jωt)
– общая нестационарная передаточная
ф-ия, g(τ,t)
– импульсная. Динамическая
погрешность – разность между выходными
и входными величинами при отсутствии
других погрешностей. β(t)=y(t)-x(t).
Если есть изменяющийся во времени
входной СП, то есть динамическая
погрешность. Для стационарного процесса:
Mβ(t)= Можем показать, что на входе мат ожидание
const:
Mβ(t)=0,
так, если x(t)
является const
или медленно меняется с ф-ей, то мат
ожидание: M[x(t)]=x(t),
M[y(t)]=x(t),
тогда: M[β]=M[y(t)-x(t)]=0.
При этом: M[y(t)-x(t)]=
y(t)-x(t).
Дисперсия β(t)
будет представлять его алгебраическую
сумму, если W(jω)=e^(jωτ0)-идеальная
задержка. Поэтому дисперсия: Dβ=2[RХ(0)-
RХ(τ0)].
Если на входе будет белый шум, то:
Dβб.ш.=2Dб.ш.
x(t)-белый
шум на входе, y(t)-
белый шум на выходе: они некоррелированы,
следовательно алгебраическая сумма
двух белых шумов. Динамич. и случайная
погрешность характеризуется дисперсиями,
следовательно важно найти оптимум,
т.е. случайная погрешность должна быть
минимальна. DСЛУЧ.ПОГР→
D/(n-1);(n-1)=tУСРЕДНЕНИЯ;
DβДИНАМИЧ.ПОГР.→tУСРЕДНЕНИЯ
Можем показать, что на входе мат ожидание
const:
Mβ(t)=0,
так, если x(t)
является const
или медленно меняется с ф-ей, то мат
ожидание: M[x(t)]=x(t),
M[y(t)]=x(t),
тогда: M[β]=M[y(t)-x(t)]=0.
При этом: M[y(t)-x(t)]=
y(t)-x(t).
Дисперсия β(t)
будет представлять его алгебраическую
сумму, если W(jω)=e^(jωτ0)-идеальная
задержка. Поэтому дисперсия: Dβ=2[RХ(0)-
RХ(τ0)].
Если на входе будет белый шум, то:
Dβб.ш.=2Dб.ш.
x(t)-белый
шум на входе, y(t)-
белый шум на выходе: они некоррелированы,
следовательно алгебраическая сумма
двух белых шумов. Динамич. и случайная
погрешность характеризуется дисперсиями,
следовательно важно найти оптимум,
т.е. случайная погрешность должна быть
минимальна. DСЛУЧ.ПОГР→
D/(n-1);(n-1)=tУСРЕДНЕНИЯ;
DβДИНАМИЧ.ПОГР.→tУСРЕДНЕНИЯ
3.Фазометр с перекрытием
![]() Это
двухполупериодная схема. U1=A1sinωt,
U2=A2sin[ωt+ϕ];
1-инвертор; &-двухкодовые линии; на
выходе - широтно-импульсный сигнал. В
ШИМ можно преобразовать в напряжение
или в цифру. Для преобразования в
напряжение необходима следующая
цепочка: ШИМ→нормализатор амплитуды
цифрового сигнала→ФНЧ(сглаживает
сигнал)→U(
Это
двухполупериодная схема. U1=A1sinωt,
U2=A2sin[ωt+ϕ];
1-инвертор; &-двухкодовые линии; на
выходе - широтно-импульсный сигнал. В
ШИМ можно преобразовать в напряжение
или в цифру. Для преобразования в
напряжение необходима следующая
цепочка: ШИМ→нормализатор амплитуды
цифрового сигнала→ФНЧ(сглаживает
сигнал)→U( ).
).
 ,
где Т-оператор сглаживания. Функция
нормализатора – логическим уровням 0
и 1 присваивать жесткие или нормированные
значения. Фазовый сдвиг:
=360оn/N,
где n-кол-во
импульсов нашей частоты через сигнал,
N-частота
заполнения. Фазовая
характеристика фазометра с перекрытием:
,
где Т-оператор сглаживания. Функция
нормализатора – логическим уровням 0
и 1 присваивать жесткие или нормированные
значения. Фазовый сдвиг:
=360оn/N,
где n-кол-во
импульсов нашей частоты через сигнал,
N-частота
заполнения. Фазовая
характеристика фазометра с перекрытием:
 0-180о
– растущий, 180о
-360о
– падающий. Она неоднозначна на цикле(2π
или 360о
период) фазы (нельзя сказать, где
находится эта точка). Плюсы: хорошо
работает при малых соотношениях
сигнал/шум. Временная диаграмма,
квазигармонический сигнал: (с инвертора
– прямой опорный инвертированный)
0-180о
– растущий, 180о
-360о
– падающий. Она неоднозначна на цикле(2π
или 360о
период) фазы (нельзя сказать, где
находится эта точка). Плюсы: хорошо
работает при малых соотношениях
сигнал/шум. Временная диаграмма,
квазигармонический сигнал: (с инвертора
– прямой опорный инвертированный)

Билет №4 1.Эргодичность и стационарность СП
Стационарность – это неизменность характеристик СП во времени по аргументу. Стационарным СП в узком (строгом) смысле называют такой случайный СП, у которого все конечные функции распределения инвариантны относительно сдвига во времени, те при любом n и t0 справедливо: F(x1,x2…xn; t1,t2…tn)= F(x1,x2…xn; t1+t0,t2+t0…tn+t0)
Стационарность в широком смысле: СП называют стационарным в широком смысле (или по Хинчину, или слабо стационарный) - это такой СП, у которого мат ожидание=const, дисперсия=const, а ковар ф-ия инварианта относительно времени, а зависит только от сдвига времени равного τ=t2-t1: Kx(t1,t2)= Kx(τ), Rx(t1,t2)= Rx(τ). Таким образом стационарный в широком смысле СП является частным случаем СП в узком смысле. Стационарность в широком и узком смысле совпадает для нормальных СП.
Стационарный
процесс называется
эргодическим
в строгом смысле, если с вероятностью
P=1
все его характеристики могут быть
получены по одной реализации (результаты
усреднения по времени совпадают с
результатами усреднения по ансамблю).
Стационарный процесс не всегда является
эргодическим, например квазигармонический
стационарный процесс: x(t)=A(t)cos[ωt+φ(t)].
Если φ(t)
неограничен, то это неэргодический СП.
Если 0 2π,
те задано на цикле, то это эргодический
СП.
2π,
те задано на цикле, то это эргодический
СП.