

Билет №1 1.Определение первичного преобразователя, преобразователя, прибора и системы
Прибор состоит из первичного преобразователя (это датчик - преобразовывает физическую величину в электрический сигнал), устройства отображения информации (шкала, интерфейс, табло). Приборы измеряют прямые измерения. Системы содержат тысячи каналов – многоканальные прямые измерения. Системы измерения: косвенные и совокупные. Первичный измерительный преобразователь — измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина. Первичный измерительный преобразователь является первым преобразователем в измерительной цепи измерительного прибора. Измерительный прибор — средство измерения, предназначенное для получения значений измеряемой физической величины в установленном диапазоне. Измерительная система — это совокупность средств измерений и вспомогательных устройств, соединенных между собой каналами связи, размещенных в разных точках контролируемого пространства с целью измерения одной или нескольких физических величин, свойственных этому пространству (контролирующие, управляющие системы с ЭВМ).
2.Теорема Хинчина-Винера
Спектральная плотность S(w) стационарного случайного процесса в широком смысле х(t) есть интеграл Фурье от ковариационной функции стационарного случайного процесса.
 .
Или на основании обратного преобразования:
.
Или на основании обратного преобразования:

ω=2πf, при переходе из временной области в частотную появляется 1/2π
Эта
пара преобразований Фурье называется
теоремой Хинчина-Винера. Дисперсия
стационарного СП = площади под кривой
спектральной плотности, и это значит,
что процесс центрированный.
Нецентрированный:
 ,
где
,
где
 можно заменить на 1. Это вытекает из
замены корр ф-ции на ковар. Спектральную
плотность следует трактовать, как
мощность сигналов, приходящихся на
интервал
можно заменить на 1. Это вытекает из
замены корр ф-ции на ковар. Спектральную
плотность следует трактовать, как
мощность сигналов, приходящихся на
интервал
 или как мощность, приходящуюся на каждую
частоту
или как мощность, приходящуюся на каждую
частоту →0.
→0.
3.«Горячее» резервирование аппаратуры
«Горячее»
резервирование: параллельно основному
комплекту аппаратуры работает резервный
комплект. Если один комплект работает,
а остальные в отключенном состоянии,
то это «холодное» резервирование. Общее
«горячее» резервирование. Вероятность
безотказной работы: P ,
тогда Q
,
тогда Q .
Если отказ – внезапное, случайное и
независимое событие, то
.
Если отказ – внезапное, случайное и
независимое событие, то
 – вероятность отказа резервной
аппаратуры.
– вероятность отказа резервной
аппаратуры.
 (если учитывать, что дублируемая
аппаратура одинакова с основной)
(если учитывать, что дублируемая
аппаратура одинакова с основной)
 .
Тогда вероятность исправной работы:
.
Тогда вероятность исправной работы:
 ,
где n
– кол-во элементов, входящих в один
комплект аппаратуры. Для экспоненциального
закона распределения интенсивности
отказа справедливо:
,
где n
– кол-во элементов, входящих в один
комплект аппаратуры. Для экспоненциального
закона распределения интенсивности
отказа справедливо:
 где
где
 .
Тогда, учитывая, что
.
Тогда, учитывая, что
 ,
получаем:
,
получаем:


Вероятность безотказной работы стремится к 1.
Поэлементное
«горячее» резервирование. Два
транзистора, включенные параллельно
не работают (один призакрывается, другой
приоткрывается), пока один из них не
сгорит. Отказ аппаратуры произойдет,
если откажут все m+1
элементов в любой итой группе:
 .
Тогда вероятность исправной работы:
.
Тогда вероятность исправной работы: Так как все элементы в группе равны,
то:
Так как все элементы в группе равны,
то:
 .
Группы элементов подчиняются законам
основного соединения, поэтому:
.
Группы элементов подчиняются законам
основного соединения, поэтому:
 ,
где n
– количество элементов. Рост m
незначительно влияет на время безотказной
работы.
,
где n
– количество элементов. Рост m
незначительно влияет на время безотказной
работы.
Билет №2
1.Статические и динамические характеристики приборов
Статические характеристики: В установившемся режиме работа прибора характеризуется алгебраическими уравнениями, выражающими статические характеристики прибора: y=f(x). x→прибор→у. Оно является основным уравнением прибора. Желательно, чтобы у=f(х) была линейной.
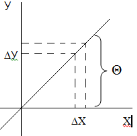
S=lim(∆y/∆x)=dy/dx=mУ/mХ*tgΘ, где чувствительность S – предел отношения выходной величины к входной, my и mx – масштабные множители, Θ – характеристика тангенса угла наклона касательной.
Порог чувствительности это минимальное приращение измеряемой величины Х (входное значение) при которой У (выходное значение) начнет изменятся.
 ,
где * - зона нечувствительности
,
где * - зона нечувствительности
Общетехническое определение порога чувствительности: минимальное значение входной величины различимое на уровне помех и шумов (или на уровне аддитивной смеси помех и шумов).
Динамические характеристики средств измерения определяются переходными процессами, происходящими в них, в результате действия ступенчатых, импульсных или колебательных возмущений на входе измерителя. Наиболее часто используемыми динамическими характеристиками являются время установления показаний, а также рабочий диапазон частот.