

3.7 Построение системы логических уравнений для описания функций переходов_и_выходов_ц.А._Мура
S(t) = {S(t-1),x(t)}
Y(t) = {S(t-1),x(t)}
T1= Q1-Q2Q3-X1 V Q1Q2Q3X1-X2 V Q1-Q2-Q3 V -Q1-Q2Q3X1 V –Q1-Q2-Q3
T2= -Q1Q2Q3X1 V -Q1Q2-Q3 V Q1-Q2Q3-X1 V Q1-Q2-Q3 V Q1Q2-Q3 V Q1Q2-Q3 V-Q1-Q2Q3X1 V –Q1-Q2-Q3
T3= -Q1-Q2Q3-X1 V –Q1Q2Q3X1 V –Q1Q2-Q3 V-Q1Q2Q3X1X2 V Q1-Q2Q3-X1 V Q1Q2Q3X1X2 V Q1-Q2-Q3 V Q1Q2-Q3 VQ1Q2-Q3-X1 V -Q1Q2Q3X1 V -Q1-Q2-Q3
Y0 = -Q1-Q2Q3-X1 V –Q1Q2Q3X1
Y1 = -Q1Q2-Q3 V Q1Q2-Q3 V Q1Q2Q3-X1 V –Q1Q2Q3X1
Y2 = -Q1Q2Q3X1X2 V Q1-Q2Q3-X1 V Q1Q2Q3X1-X2 V Q1Q2-Q3
Y3 = Q1-Q2-Q3
Y4 = Q1Q2-Q3 V Q1Q2Q3
3.8 Построение минимизированной системы логических уравнений ц.А.
T1= -Q2Q3-X1 V Q1Q2Q3X1-X2 V –Q2-Q3 V –Q1Q2Q3-X1
T2= -Q1Q2Q3X1 V Q2-Q3 V-Q2Q3-X1 V Q1-Q3 V -Q1-Q2-Q3
T3= -Q2Q3-X1 V -Q1Q2Q3X1 V Q2-Q3 V -Q1-Q2-Q3X1X2 V Q1Q2Q3X1- X2 V Q1Q2-Q3-X1
Y0 = -Q1-Q2Q3-X1 V -Q1Q2Q3X1
Y1 = Q2-Q3 V -Q1-Q2Q3-X1 V -Q1Q2Q3X1
Y2 = -Q1Q2Q3X1X2 V Q1-Q2Q3-X1 V Q1Q2Q3X1-X2 V Q1Q2-Q3
Y3 = Q1-Q2-Q3
Y4 = Q1Q2
3.9 Оптимизация_функций_схемы_ц.А.
Запишем оптимизацию функций схемы Ц.А. Мили в виде таблицы (таблица 3.3).
Таблица 3.3 – Оптимизация функций
|
T1 |
T2 |
T3 |
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
k1 |
+ |
+ |
+ |
|
|
|
|
|
k2 |
+ |
|
+ |
|
|
+ |
|
|
k3 |
+ |
|
|
|
|
|
|
|
k4 |
+ |
|
|
|
|
|
|
|
k5 |
|
+ |
|
+ |
+ |
|
|
|
k6 |
|
+ |
+ |
|
+ |
|
|
|
k8 |
|
+ |
|
|
|
|
|
|
k9 |
|
+ |
|
|
|
|
|
|
k13 |
|
|
+ |
|
|
|
|
|
k15 |
|
|
+ |
|
|
|
|
|
k16 |
|
|
|
+ |
+ |
|
|
|
k21 |
|
|
|
|
|
+ |
|
|
k22 |
|
|
|
|
|
+ |
|
|
k24 |
|
|
|
|
|
+ |
|
|
k25 |
|
|
|
|
|
|
+ |
|
k26 |
|
|
|
|
|
|
|
+ |
k1 = -Q2Q3-X1
k2 = Q1Q2Q3X1-X2
k3 = -Q2-Q3
k4 = -Q1Q2Q3-X1
k5 = -Q1Q2Q3X1
k6 = Q2-Q3
k7
= -Q2Q3-X1
k8 = Q1-Q3
k9 = -Q1-Q2-Q3
k10
= -Q2Q3-X1
k11
= -Q1Q2Q3X1
k12
= Q2-Q3
k13 = -Q1-Q2-Q3X1X2
k14
= Q1Q2Q3X1-X2
k15 = Q1Q2-Q3-X1
k16 = -Q1-Q2Q3-X1
k17
= -Q1Q2Q3X1
k18
= -Q2-Q3
k19
= -Q1-Q2Q3-X1
k20
= -Q1Q2Q3X1
k21 = -Q1Q2Q3X1X2
k22 = Q1-Q2Q3-X1
k23
= Q1Q2Q3X1-X2
k24 = Q1Q2-Q3
k25 = Q1-Q2-Q3
k26 = Q1Q2
На основе полученных функций возбуждения и функций выходов построим функциональную схему управляющего автомата Мура (рисунок 3.4).
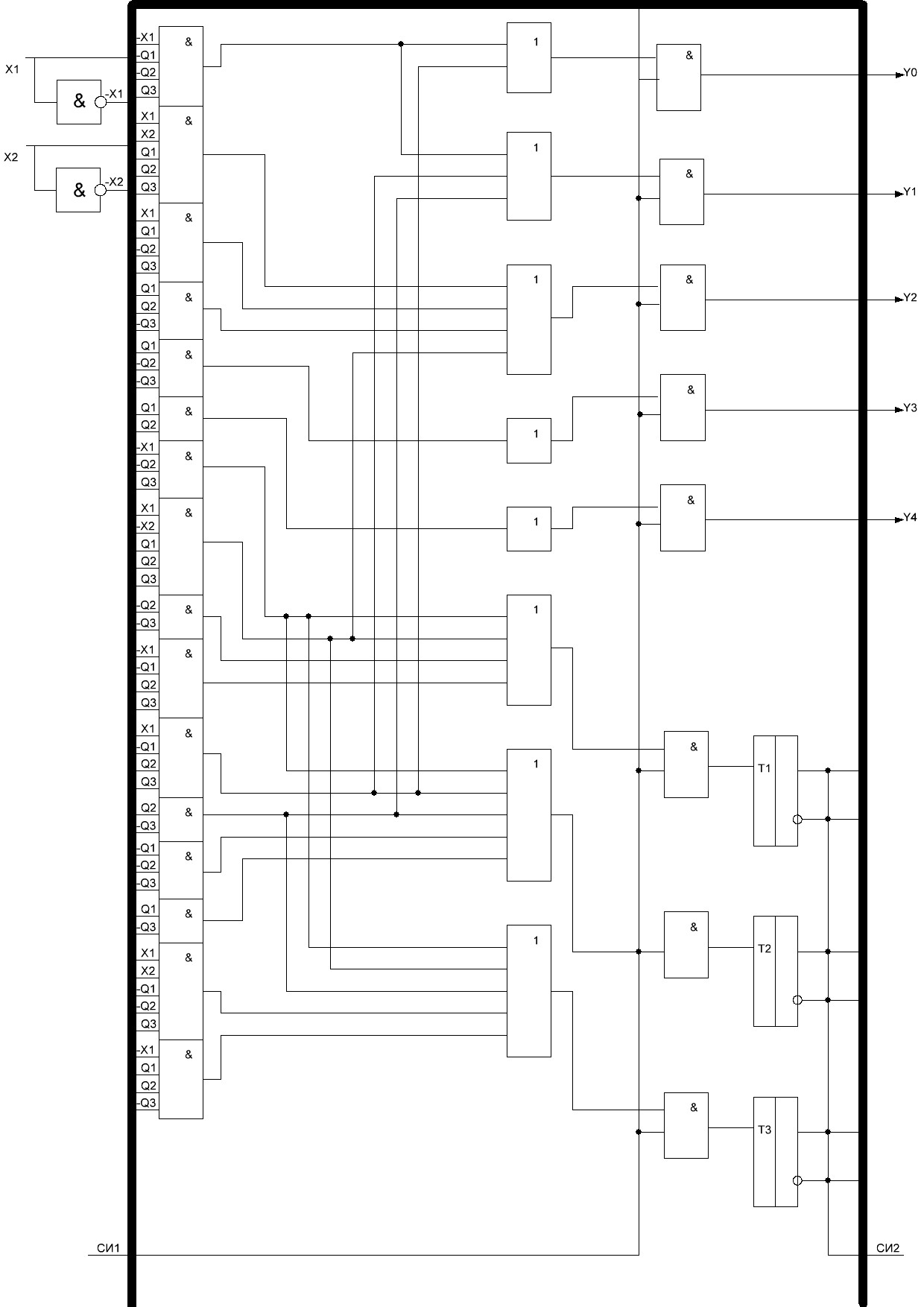
Рисунок 3.4 - Функциональная схема управляющего автомата Мура