

2.13 Расчет блока динамического торможения
Во многих установках эффект от применения рекуперативного торможения оказывается незначительным, в то время, как динамическое торможение обеспечивает удовлетворительные показатели при меньших капитальных затратах.
При динамическом торможении рассеивается энергия вследствие эффекта Джоуля в сопротивлении торможения RT через тормозной транзистор VTT, включенный параллельно с диодом и работающий в импульсном режиме (рис. 2.6а). Этот резистор включается к цепи постоянного тока, когда ее напряжение, вследствие подзаряда сглаживающего конденсатора, повышается до некоторого значения. Управление транзистором, включающим тормозной резистор, может быть организовано автономно от управления АИН с контролем абсолютного значения напряжения Ud (рис.2.6б), где Uвкл и Uоткл — уровни срабатывания порогового элемента, управляющего тормозным транзистором, tвкл и tоткл — соответственно время его включенного и отключенного состояний.
Величина сопротивления резистора динамического торможения может быть рассчитана
![]()
гдеUd – максимальное напряжение в звене постоянного тока;
Рэ.mах - максимальная мощность, возвращаемая в звено постоянного тока [Вт].
Ток, коммутируемый ключем (транзистором) динамического торможения, находится
![]()
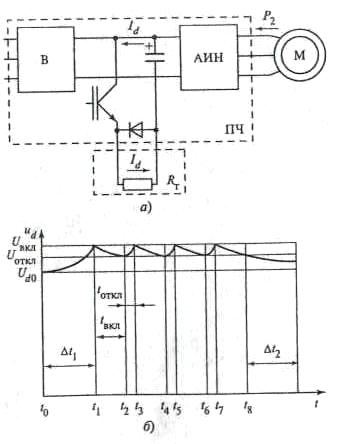
Рисунок 2.6 - Процесс торможения в ЭП, выполненный на основе ПЧ с АИН:
а – включение тормозного резистора;
б – входное напряжение АИН при релейном управлении
тормозным транзистором.
Мощность тормозного резистора
![]()
Если в ПЧ со звеном постоянного тока не предусмотрено рекуперативное или динамическое торможение, то генерируемая двигателем энергия повышает напряжение на конденсаторе. При этом увеличивается напряжение на входе инвертора, а, следовательно, и на асинхронном двигателе, что приводит к перевозбуждению и насыщению его магнитопровода. В результате потери в асинхронном двигателе увеличиваются, что в какой-то степени равносильно режиму динамического торможения, причем без усложнения схемы электропривода.
Выбираем блок тормозного резистора типа 6SE7028 – 0EA87 – 2DA0, для осуществления реостатного частотного торможения. Технические характеристики блока 6SE7028 – 0EA87 – 2DA0 представлены в таблице. 3.3.
Таблица 2.11 -Технические характеристики блока тормозного резистора 6SE7028 – 0EA87 – 2DA0.
Тип БТР |
RT, Ом |
|
U, В |
6SE7028 – 0EA87 – 2DA0 |
8 |
50 |
510 - 650 |
Заключение
В ходе выполнения работы, мной были усвоены методы расчета и выбора электрической аппаратуры управления в схемах электропривода постоянного и переменного тока.
В первом задании был произведен расчёт и выбор электрических аппаратов для системы ТП-Д .
Во втором задание произведен расчет и выбор аппаратуры в релейно-контакторной схеме управления электроприводом асинхронного двигателя с короткозамкнутым ротором.
Все выбранные аппараты обеспечивают стабильную работу электропривода в наиболее экономичном режиме, с наименьшими капитальными затратами, а также бесперебойную работу двигателей и защищают его от протекания нежелательных токов.