

Адаптивные системы автоматического управления техническими объектами с контурами моделирования и идентификации
Изучение теоретических и практических положений математического моделирования и идентификации технических систем важно и полезно с позиции приобретения навыков проектирования и исследования элементов систем автоматического управления. Современные достижения теории автоматического управления, вычислительной техники и программирования, систем связи и телекоммуникаций, способствовали внедрению методов математического моделирования и идентификации в практику управления сложными техническими объектами, подверженными действию внешних возмущений и помех.
Принципы использования методов моделирования и идентификации в системах автоматического управления
На рисунке 2.1 изображена структура схемы управления технологическим объектом [9].
В реальных условиях эксплуатации технических объектов их свойства и параметры не остаются постоянными, что приводит к функционированию систем управления подобными объектами в условиях неопределенности. Обеспечение работоспособности систем управления в условиях неопределенности достигается с помощью использования принципа адаптации [32], который позволяет искусственно создавать эффект приспособления к изменяющимся условиям в автоматических системах за счет того, что часть функций по получению, обработке и анализу недостающей информации об управляемом процессе осуществляется самой системой в процессе ее нормальной эксплуатации с помощью адаптивного управляющего устройства (АУУ), а не проектировщиком на предварительной стадии разработки систем. Это позволяет существенно снизить влияние неопределенной степени недостатка априорной информации об управляемом процессе на стадии проектирования.
Автоматические системы, в которых параметры управляющих воздействий или алгоритмы управления автоматически и целенаправленно изменяются для осуществления в каком-либо смысле наилучшего управления объектом (причем характеристики объекта или воздействий внешней среды могут изменяться заранее непредвиденным образом), называют адаптивными автоматическими системами.
Обобщенная функциональная схема адаптивной автоматической системы показана на рисунке 2.2, где АУУ в общем случае представляет собой комплекс измерительных, преобразовательных и вычислительных устройств, а также усилительных и исполнительных элементов.
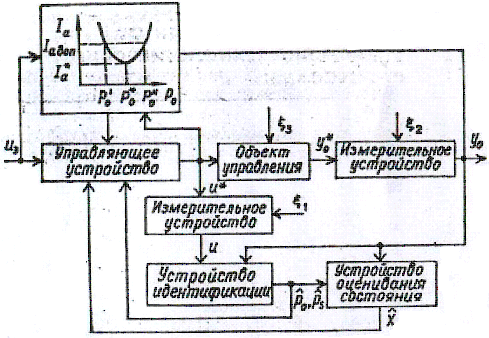
Рисунок 2.1
Принцип адаптации применяется в тех случаях, когда сложность управляемого процесса достигает такого уровня, при котором ощущается сильное влияние системы к изменяющимся непредвиденным образом условиям функционирования объекта.
В классификации адаптивных систем выделяют два класса: самонастраивающиеся и обучающиеся.
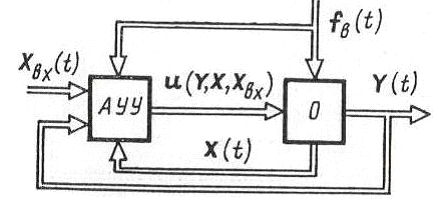
Рисунок 2.2
Обучающиеся системы – это такие системы, в которых пополнение недостающей информации осуществляется в процессе обучения, производством, как правило, путем внешней корректировки алгоритма системы человеком или специальным автоматическим устройством, заранее знающим способ оптимального функционирования в данной ситуации.
Другим наиболее распространенным классом адаптивных систем являются самонастраивающиеся системы (СНС), отличающиеся от обучающихся тем, что не содержат элементов обучения.

Рисунок 2.3
Работу СНС в общем виде можно представить как процесс автоматического измерения основных показателей функционирования объекта управления и автоматической настройки характеристик управляющего устройства для достижения наилучшего качества. Структурная схема СНС показана на рисунке 2.3, где в отличие от обычных систем автоматического управления, содержащих объект О и управляющее устройство УУ, появляется блок определения характеристик и настройки БОХН. Источниками информации, необходимой для настройки управляющего устройства системы, могут быть:
контролируемое возмущение V;
выходные переменные объекта Y;
управляющие воздействия на объект U;
настроечные воздействия v.
Кроме того, на систему действуют неконтролируемые возмущения.
При оптимизации сложных технологических объектов обычно требуется знание их динамических характеристик независимо от того, проводится оптимизация для статических или динамических режимов. Определение математической модели объекта может быть осуществлено известными способами, рассмотренными выше.
Эффективным является определение динамических характеристик объекта с помощью некоторой настраиваемой динамической модели, что позволяет использовать полученную модель также для решения задач управления.
Применение модели в САУ позволяет решать следующие задачи:
1) определение математического описания (динамических характеристик объекта) и использование этого описания для проектирования системы автоматического управления, настройки регуляторов и других целей – модель как датчик характеристик объекта;
2) изменение характеристик системы управления в желаемом направлении – модель как корректирующее устройство;
3) измерение действительного или желаемого динамического состояния объекта в настоящем или будущем времени и использование этих данных для установления оптимальных в определенном смысле параметров управления – модель как датчик динамического состояния объекта.
На рисунке 2.4 приведена обобщенная схема СНС с использованием модели, где в целях наглядности обобщенная схема СНС (см. рисунок 2.3) изменена таким образом, что модель, входящая в управляющее устройство, вынесена за его пределы.
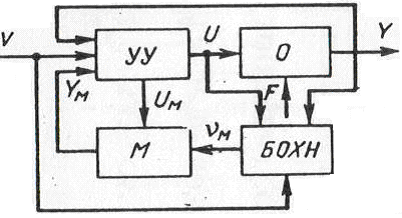
Рисунок 2.4
Под объектом моделирования здесь понимается некоторый объект наблюдения, который в частных случаях может быть объектом управления (или его частью), элементом управляющего устройства или замкнутой системой регулирования. На рисунке 2.4 приняты обозначения: вектор управляющих моделью воздействий Uм, вектор выходных величин модели Yм, вектор настроек модели vм (в общем случае эти величины могут быть векторными).
Если Yм
определяется
только динамической характеристикой
объекта (Uм=0),
то модель является датчиком динамических
характеристик объекта. Для моделей,
выполняющих функцию корректирующего
устройства или датчика динамического
состояния объекта (ДСО), Uм 0.
Различие двух последних функций
заключается в том, что если модель
является датчиком ДСО в настоящем или
будущем времени, то выходные величины
модели и объекта совпадают хотя бы на
некоторых интервалах времени Ti
, Tj.
Например, в частном случае, когда
рассматривается модель объекта
управления, выполняющая функции датчика
ДСО, имеем:
0.
Различие двух последних функций
заключается в том, что если модель
является датчиком ДСО в настоящем или
будущем времени, то выходные величины
модели и объекта совпадают хотя бы на
некоторых интервалах времени Ti
, Tj.
Например, в частном случае, когда
рассматривается модель объекта
управления, выполняющая функции датчика
ДСО, имеем:
Yм(ts,
Ti)
= Y(t+ ,
Tj),
( 2.1)
,
Tj),
( 2.1)
где s
– масштабный коэффициент времени модели
(s ),
при этом
=0
для модели – датчика ДСО в настоящем
времени;
>0
для модели – датчика ДСО в будущем
времени.
),
при этом
=0
для модели – датчика ДСО в настоящем
времени;
>0
для модели – датчика ДСО в будущем
времени.
Условие (2.1) означает, что
Uм(ts, Ti) = U (t+ , Tj). ( 2.2)
Во всех случаях, когда выходные величины объекта и его модели не совпадают хотя бы на некоторых интервалах времени, модель выполняет функцию корректирующего устройства.