

Адаптивные системы с моделью – эталоном
Системы с моделью – эталоном были одними из первых адаптивных систем. Их появлению способствовало бурное развитие авиационной и космической техники. Дело в том, что при полетах со сверхзвуковыми скоростями и в различных аэродинамических условиях изменяются весьма значительно. В то же время требуется, чтобы качество процессов управления аппаратами соответствовало некоторому стандарту. В связи с этим возникла идея управления объектами таким образом, чтобы процессы в реальном объекте приближались к процессам в некотором идеальном (номинальном) объекте, который реализуется с помощью модели – эталона.
В зависимости от рассогласования между желаемым состоянием объекта, получаемым от модели – эталона, и действительным состоянием объекта происходит подстройка управления объектом (формирование дополнительной составляющей управления или структуры системы управления). Этот принцип – управление по образцу (эталону), широко и зачастую бессознательно применяемый нами в повседневной жизни, с успехом был применен в САУ различными процессами, в том числе и технологическим. В настоящее время известно несколько модификаций указанного принципа, некоторые из которых рассмотрим.
В схеме управления
скоростью
 летательного аппарата в плоскости
тангажа эталонная модель служит для
выработки установки системы управления
(рисунок 2.7), давая желаемый характер
изменения переменной
.
При достаточно высоком коэффициенте
усиления прямого тракта выход системы
с определенным приближением повторяет
выход модели в широком диапазоне
аэродинамических характеристик аппарата.
Подстройка коэффициентов усиления
системы производится по ошибке между
желаемой и действительной переменной
летательного аппарата в плоскости
тангажа эталонная модель служит для
выработки установки системы управления
(рисунок 2.7), давая желаемый характер
изменения переменной
.
При достаточно высоком коэффициенте
усиления прямого тракта выход системы
с определенным приближением повторяет
выход модели в широком диапазоне
аэродинамических характеристик аппарата.
Подстройка коэффициентов усиления
системы производится по ошибке между
желаемой и действительной переменной
 .
Недостаток системы такого типа –
требование больших коэффициентов
усиления и возникающая при этом проблема
устойчивости.
.
Недостаток системы такого типа –
требование больших коэффициентов
усиления и возникающая при этом проблема
устойчивости.
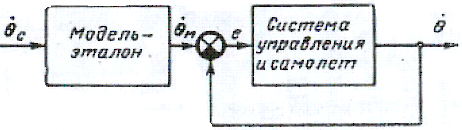
Рисунок 2.7
Большое распространение получила схема, реализованная в автопилоте Массачусетского технологического института (рисунок 2.8). Основная часть системы (нижний контур) рассчитывается из условий устойчивости и оптимальности характеристик для номинальных характеристик О и при отсутствии сигнала коррекции uк. Верхний контур, включающий в себя модель – эталон, передаточная функция которой соответствует номинальной передаточной функции основной системы, проявляет свое действие только в том случае, если характеристики объекта управления отличаются от номинальных. В этом случае ошибка е, на основе которой в корректирующем устройстве (КУ) вырабатывается дополнительная составляющая uк к основному управлению u, осуществляемому регулятором P. Система удовлетворительно работает лишь при сравнительно медленном изменении характеристик объекта.

Рисунок 2.8
Адаптивные сау с идентификацией моделей по результатам мониторинга средствами scada-систем
Представим структуру и алгоритмы работы адаптивных САУ техническими объектами с учетом следующих допущений, гипотез и условий (см. рис. 2.9).
Основным режимом работы технического объекта и его САУ является характеризуемый в общем случае как стохастический процесс с нормальными законами распределения основных возмущений, помех и физических координат на выходе объекта и элементов САУ.
В режимах пуска, остановки и экстренных отключений технический объект и элементы САУ могут рассматриваться как детерминированные, подверженные действию воздействий, идентифицируемых как ступенчатые, импульсные, и (или) гармонические входные сигналы.
Существует возможность технической реализации системы автоматического контроля реально наблюдаемых физических координат объекта и выходных координат элементов САУ в реальном масштабе времени.
Средствами SCADA-систем массивы измеряемых координат сохраняются в базе данных адаптивной САУ.
В структуре адаптивной САУ присутствует блок идентификации режимов работы объекта в смысле гипотез, сформулированных выше в пп. 1 и 2 (на схеме рис. 2.9 это блок «иден. реж. – Б. № 1»).
В структуре адаптивной САУ существует подсистема идентификации структуры и параметров математических моделей объекта и элементов САУ (подсистема — «П. иден.»). В зависимости от идентификации режима (см. пп. 5) в подсистеме «П. иден.» активизируются группы блоков стохастической (блок «стох. иден.» – Б. №2) или детерминированной (блок «детер. иден.» – Б. № 3) идентификации.
В структуре адаптивной САУ существует подсистема эталонных моделей объекта и элементов САУ (подсистема «Эталон» – Б. № 4).
В структуре адаптивной САУ существует подсистема «Банк диагностируемых неисправностей технического объекта и элементов САУ (на рис. 2.9 это подсистема «Банк неисправностей»: «П. неиспр.» – Б. № 5).
В структуре адаптивной САУ присутствует подсистема «П. прогноз»—(Б. № 6) прогнозирующая показатели надежности (достигнутого ресурса на момент анализа объекта), рассчитываемые по информации из базы данных SCADA-системы (по «историческим» трендам технического объекта и элементов САУ).
В структуре адаптивной САУ присутствует подсистема адаптации, включающая блок автоматической адаптации (блок «БАА» – Б. № 7), блок нечеткой логики и рекомендуемых алгоритмов управления (блок «БНЛ» – Б. № 8), блок автоматизированной адаптации (блок «БААЧ» – Б. № 9). В работе блока БААЧ участвует человек—администратор адаптивной САУ, утверждающий решения, генерируемые блоками БАА, БНЛ, или предлагающий свое решение по работе адаптивной САУ.
Программно-алгоритмическое обеспечение адаптивной САУ состоит из системной, специализированной и специальной частей. Системная часть это операционная система (например, ОС Windows ХР) и входящие в нее компоненты. Специальная часть — это пакеты прикладных программ (ППП) MatLAB и SCADA-система. Специализированной частью будет оригинальное программно-алгоритмическое обеспечение выполняющее функцию диспетчера—супервизора адаптивной САУ. Определим в виде отдельного блока адаптивной САУ, собственно и выполняющего функции супервизора, блок — ядро САУ: «БЯСАУ»—(Б. № 10).
Взаимодействие компонентов SCADA-система, ППП MatLAB, элементов технологического объекта осуществляется под управлением БЯСАУ в режимах разделенного или реального времени. В последнем случае подключается подсистема ППП MatLAB — Real Time Windows Target и Work Shop [28, стр. 529] — средство управления реальными объектами и системами. Кроме того это расширение MatLAB позволяет создавать исполняет коды моделей элементов технического объекта.
На рисунке 2.9 приводится структура адаптивной САУ, соответствующая пп. 1 — 12, а на рисунке 2.10 алгоритм работы БЯСАУ.
 Рисунок 2.9
- Структура адаптивной САУ
Рисунок 2.9
- Структура адаптивной САУ

Рисунок 2.10 - Алгоритм работы БЯСАУ