

Модуль нормального ускорения точки
![]() (7)
(7)
Если
радиус кривизны траектории![]() в рассматриваемой точке неизвестен, то
в рассматриваемой точке неизвестен, то
![]() можно определить по
формуле:
можно определить по
формуле:
![]() .
(8)
.
(8)
При движении точки в плоскости формула (8) принимает вид:
![]() (8')
(8')
Модуль нормального ускорения можно определить и следующим образом:
![]() .
(9)
.
(9)
После того, как найдено нормальное ускорение по формулам (8) или (9), радиус кривизны траектории в рассматриваемой точке определяется из выражения:
![]() (10)
(10)
Результаты
вычислений по формулам (3 –6), (8) и(10) для
заданного момента времени
![]() приведены в таблице 9.
приведены в таблице 9.
Таблица 9
х |
у |
vх |
vу |
v |
ах |
ау |
а |
аτ |
ап |
ρ |
2,0 |
3,0 |
4,0 |
16,0 |
16,5 |
0 |
32,0 |
32,0 |
31,0 |
7,8 |
35,0 |
На
рисунке 15 показано положение точки
в заданный момент времени. Вектор
![]() строим по составляющим,
строим по составляющим,
![]()
![]() Причём
этот вектор должен по направлению
совпадать с касательной к траектории.
Вектор
Причём
этот вектор должен по направлению
совпадать с касательной к траектории.
Вектор
![]() строим по составляющим
и
и затем раскладываем
на составляющие
и
.
Совпадение величин
и
найденных из чертежа,
с их значениями, полученными аналитически,
служит контролем правильности решения.
строим по составляющим
и
и затем раскладываем
на составляющие
и
.
Совпадение величин
и
найденных из чертежа,
с их значениями, полученными аналитически,
служит контролем правильности решения.

Рисунок 15
4. Определение абсолютной скорости и абсолютного ускорения точки
Точка М движется относительно тела D. По заданным уравнениям относительного движения точки M и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки М. Схемы механизмов показаны на рисунках 17 – 19. А необходимые для расчёта данные приведены в таблице 10.
Пример выполнения задания: Дано: схема механизма рисунок 19,
![]() ;
;
![]()
![]()
РЕШЕНИЕ: Будем
считать, что в заданный момент времени
плоскость чертежа рис.16 совпадает с
плоскостью треугольника D.
Положение точки М на теле D
определяется расстоянием
![]()
При
![]()
![]()
Абсолютную скорость точки М найдём как геометрическую сумму относительной и переносной скоростей:
![]()
 .
.
Модуль относительной скорости:
![]() ;
;
где
![]() ;
;
при
![]()
![]() ;
;
![]() .
.
Рисунок 16

Рисунок 17

Рисунок 18

Рисунок 19
Таблица 10
Номер варианта |
Уравнение относительного движения точки М
|
Уравнение движения тела |
t1, см |
R, см |
а, см |
α, град |
Дополнительные данные |
|
|
|
|||||||
1 |
|
|
- |
2/3 |
- |
25 |
- |
|
2 |
|
|
- |
5/3 |
20 |
- |
- |
|
3 |
|
|
- |
2 |
- |
30 |
- |
|
4 |
|
|
- |
1 |
- |
- |
60 |
|
5 |
|
|
- |
2 |
30 |
- |
- |
|
6 |
- |
- |
|
10/3 |
15 |
- |
- |
|
7 |
|
|
- |
3/8 |
- |
40 |
60 |
|
8 |
|
|
- |
2 |
- |
- |
30 |
|
9 |
|
|
- |
1/8 |
- |
- |
- |
|
10 |
|
|
- |
4/3 |
20 |
20 |
- |
|
11 |
|
|
- |
4 |
- |
25 |
- |
|
12 |
|
|
- |
2 |
30 |
30 |
- |
|
13 |
|
|
- |
1/3 |
40 |
- |
- |
|
14 |
|
|
- |
2/3 |
- |
- |
30 |
|
15 |
|
|
- |
2 |
- |
60 |
45 |
|
16 |
|
|
- |
1/3 |
- |
20 |
- |
|
17 |
|
|
- |
1 |
- |
|
- |
|
18 |
|
|
- |
2 |
- |
- |
60 |
|
19 |
|
|
- |
2 |
40 |
- |
- |
|
20 |
|
|
- |
3 |
60 |
- |
- |
|
21 |
|
|
- |
1/2 |
25 |
- |
- |
|
22 |
|
|
- |
2/3 |
30 |
- |
- |
|
23 |
|
- |
- |
1 |
18 |
- |
- |
О1О=О2А=20cм |
24 |
|
|
- |
1 |
30 |
- |
- |
|
25 |
|
|
- |
5 |
- |
- |
- |
|
26 |
|
|
- |
3/2 |
- |
- |
45 |
|
27 |
- |
- |
|
2 |
75 |
- |
- |
|
28 |
|
|
- |
2 |
40 |
- |
- |
|
29 |
|
- |
- |
2 |
30 |
- |
- |
|
30 |
|
- |
|
2 |
48 |
- |
- |
|
Примечание к
таблице 10: Для каждого варианта
положение точки М на схеме соответствует
положительному значению sr;
в вариантах 5, 10, 12, 20-24, 28-30
![]() – дуга окружности; на схемах
5,10,12,21,24 ОМ – дуга, соответствующая
меньшему центральному углу. Относительное
движение точки М в вариантах 6 и 27 и
движение тела D в
вариантах 23 и 29 определяется уравнениями,
приведёнными в последнем столбце таблицы
10.
– дуга окружности; на схемах
5,10,12,21,24 ОМ – дуга, соответствующая
меньшему центральному углу. Относительное
движение точки М в вариантах 6 и 27 и
движение тела D в
вариантах 23 и 29 определяется уравнениями,
приведёнными в последнем столбце таблицы
10.
Положительный
знак у
![]() показывает, что вектор
показывает, что вектор
![]() направлен в сторону возрастания
направлен в сторону возрастания
![]() .
Модуль переносной скорости:
.
Модуль переносной скорости:
![]() ,
(1)
,
(1)
где
![]() – радиус окружности
– радиус окружности
![]() ,
описываемой той точкой тела, с которой
в данный момент совпадает точка
,
,
описываемой той точкой тела, с которой
в данный момент совпадает точка
,
![]() ;
;
![]() модуль
угловой скорости тела:
модуль
угловой скорости тела:
![]()
![]()
При
![]()
![]() ;
;
![]()
Отрицательный
знак величины
![]() показывает, что вращение треугольника
происходит вокруг оси
показывает, что вращение треугольника
происходит вокруг оси
![]() вниз (рисунок 20,а).
вниз (рисунок 20,а).
Модуль переносной скорости, по формуле (1)
![]()
Вектор
![]() направлен по касательной к окружности
в сторону вращения тела. Так как вектора
и
направлен по касательной к окружности
в сторону вращения тела. Так как вектора
и
![]() взаимно перпендикулярны, модуль
абсолютной скорости точки
взаимно перпендикулярны, модуль
абсолютной скорости точки
![]() .
.
или
![]() .
.
Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений:
![]() ,
,
или в развёрнутом виде:
![]() ,
,
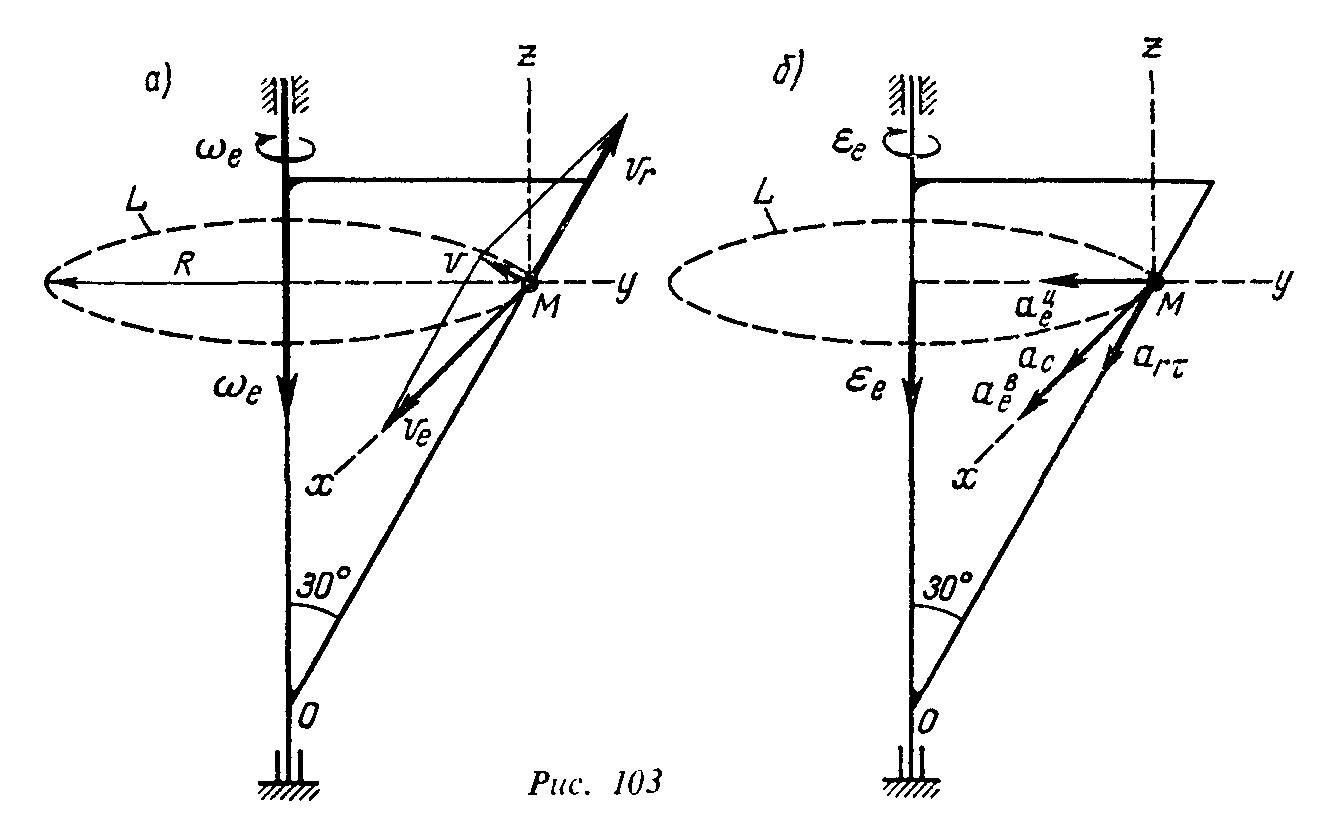
Рисунок 20
Модуль относительного касательного ускорения:
![]() ;
;
где
![]()
При
![]() ,
,
![]() .
.
Отрицательный
знак
![]() показывает, что вектор
показывает, что вектор![]() направлен в сторону отрицательных
значений
.Знаки
и
одинаковы: следовательно, относительное
движение точки
ускоренное.
направлен в сторону отрицательных
значений
.Знаки
и
одинаковы: следовательно, относительное
движение точки
ускоренное.
Относительное нормальное ускорение:
![]() ,
,
так как траектория
относительного движения – прямая
![]() .
.
Модуль переносного вращательного ускорения
![]() ,
(2)
,
(2)
где
![]() -
модуль углового ускорения тела
-
модуль углового ускорения тела
![]() :
:
![]() .
.
При
![]() ,
,
![]() .
.
Знаки
![]() и
одинаковы; следовательно, вращение
треугольника D
ускоренное, направления векторов
и
одинаковы; следовательно, вращение
треугольника D
ускоренное, направления векторов
![]() и
совпадают (рисунки 20 а, б)
и
совпадают (рисунки 20 а, б)
Согласно (2):
![]() вектор
вектор
![]() направлен в туже сторону, что и
.
направлен в туже сторону, что и
.
Модуль переносного центростремительного ускорения
![]() или
или
![]() .
.
Вектор
![]() направлен к центу окружности L.
направлен к центу окружности L.
Кориолисово ускорение
![]() ,
,
модуль кориолисова ускорения
![]() ,
,
где
![]() .
.
С учётом найденных выше значений и , получаем
![]() .
.