1.Классификация систем по цели управления. Характеристика следящих систем управления. Пример следящей сау.
В зависимости от основной цели задачи управления САР классифицируются следующим образом: системы стабилизации, система программного управления, следящие системы.
В системах стабилизации рабочий параметр объекта (регулируемая величина) поддерживается постоянным во времени при постоянном задании.
В системах программного управления рабочий параметр объекта изменяется во времени по заранее известному закону, в соответствии с которым изменяется задание.
В следящих системах рабочий параметр объекта изменяется во времени по заранее неизвестному закону, который определяется каким-то внешним независимым процессом.
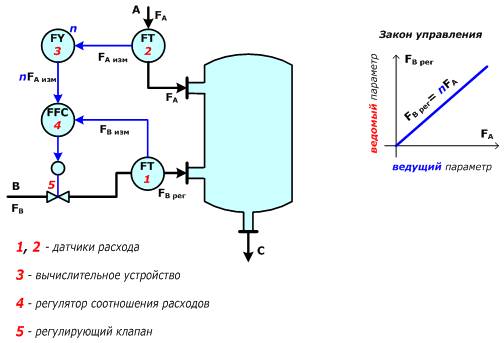
Следящие системы, в которых задающее воздействие представляет собой неизвестную заранее функцию времени, связанную с внешним, по отношению к системе управления параметром, который может изменяться случайным образом. Целью управления является воспроизведение этого случайного закона управляемой величиной y(t). Такие САУ применяются для управления одним технологическим параметром (ведомым) в зависимости от значения другого технологического параметра (ведущего), изменяющегося произвольно – например, управление расходом воздуха, подаваемого на горелку, в зависимости от расхода топлива; воспроизведение одним устройством перемещения другого устройства без механической связи между ними и т.п. Пример следящей САУ соотношением расходов показан на рис. Управляемым (ведомым) параметром является величина расхода FB рег входного потока В на подаче в аппарат, регулирование которой осуществляется в заданном соотношении n с ведущим расходом – расходом потока А (см. Error: Reference source not found ). В рассматриваемом примере величина соотношения n жестко задается функцией вычислительного устройства 3. Если величина соотношения по условиям процесса может изменяться, используют регуляторы соотношения расходов с настраиваемой при помощи органов настройки регулятора велич. соотношения, или регуляторы с внеш заданием n [1].
2. Регулирование уровня
Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю.
Важно! «приток» и «сток» здесь являются обобщенными понятиями. В случае, когда в аппарате (смесители, промежуточные емкости, жидкофазные сооружения и др) не происходит фазовых превращений, приток равен расходу жидкости, подаваемой в аппарат, а сток – расходу жидкости, отводимой из аппарата.
Изменение уровня L в аппарате с const по высоте площадью поперечного сечения А( в общем случае) уравнение:
, |
|
где Fвх и Fвых – приток и сток вещества соответственно с учетом химических и фазовых превращений.
В зависимости от требуемой точности поддержания уровня применяют один из двух способов регулирования:
позиционное, при кот. уровень в аппарате поддерживается в заданных ;
непрерывное, при кот. обеспеч. стабилизация уровня на заданном значении L=Lзд.
Регулирование уровня применяют для автоматизации водонапорных, подпиточных, расширительных и других баков и резервуаров, а также для сигнализации переполнения или опорожнения емкостей.
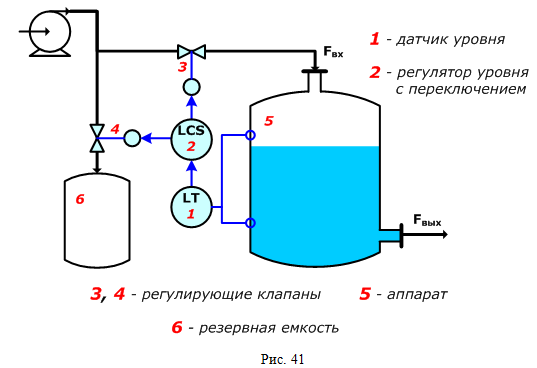
Системы позиционного регулирования уровнем чаще всего устанавливают на сборниках жидкости (например, башенных водокачек) или на промежуточных емкостях (например, в резервуарах водоотливных насосных станций). Пример схемы позиционного регулирования показан на Error: Reference source not found. При достижении уровнем верхнего предельного значения поток автоматически переключается на резервную емкость: регулятор закрывает регулирующий клапан 3 и открывает клапан 4.
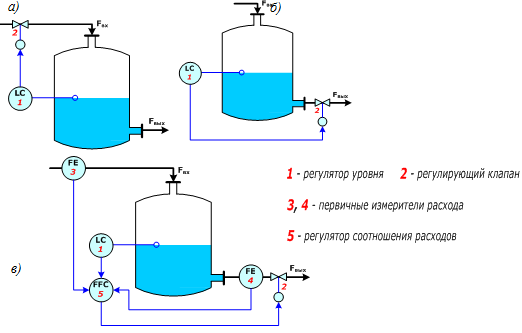
При отсутствии фазовых превращений в аппарате непрерывное регулирование уровня осущ. одним из трех способов:
изменением расхода жидкости на входе в аппарат (регулирование «на притоке», Рис. 1–а);
изменением расхода жидкости на выходе из аппарата (регулирование «на стоке», Рис. 1–б);
каскадным регулированием соотношения расходов жидкости на входе в аппарат и выходе из него, с коррекцией по уровню (Рис. 1–в).
Когда процессы в аппарате сопровождаются фазовыми превращениями, уровень можно регулировать изменением подачи теплоносителя. В таких аппаратах уровень взаимосвязан с другими параметрами (например, давлением), поэтому выбор способа регулирования должен выполняться с учетом основных контуров регулирования. Особенно высокие требования предъявляются к точности регулирования уровня в теплообменных аппаратах, в которых уровень жидкости существенно влияет на тепловые процессы: например, в паровых теплообменниках уровень конденсата определяет фактическую поверхность теплообмена.
Рис. 1
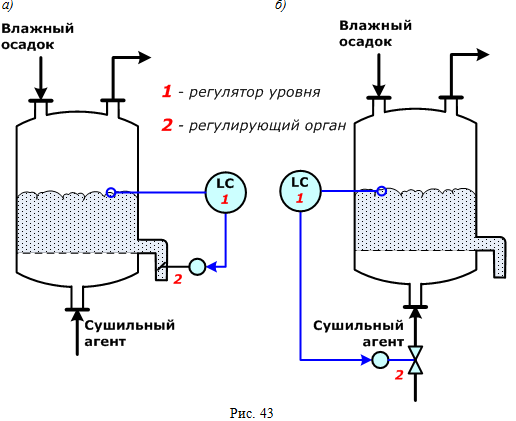
Особое место в системах регулирования уровня занимают САУ аппаратов с кипящим (псевдосжиженным) слоем сыпучего зернистого материала. Устойчивое поддержание уровня в сушилках кипящего слоя при сушке осадков сточных вод возможно в достаточно узких пределах соотношения расхода газа и массы слоя. При значительных колебаниях расхода газа или расхода зернистого материала наступает режим уноса слоя или его оседания. Поэтому к точности регулирования уровня кипящего слоя предъявляют особо высокие требования. В качестве управляющих воздействий используют расход зернистого материала осадка на входе или выходе из аппарата (Error: Reference source not found–а), или расход газа на ожижение слоя (Error: Reference source not found–б).