

С одержание
Техническое задание на курсовой проект…………………………….стр3
Принцип работы механизма …………………………………………..стр4
Расчёт механизма: ……………………………………………………...стр6
Расчет параметры ОУ… …………………………………………...стр6
Кинематический расчет механизма ………………………………стр7
3.2.1 Определение передаточных отношений между валиками…….Стр7
3.2.2 Расчёт зубчатых колес……………………………………………стр8
Силовой расчет………………………… ……………………….....стр9
3.3.1. Определение статических моментов на валиках……………...стр9
3.3.2. Выбор материала и допуска напряжения колес………………стр11
1. Рассчитываем удельную нагрузку ……………………………стр11
2. Расчет зубьев на контактную прочность……………………...стр11
3. Расчет зубьев на изгиб…………………………………………стр12
3.3.3 Определение сил действующих на зубья колес……………….стр13
3.3.4 Проверочный расчет наиболее нагруженного валика………...стр14
1. Определяем реакций опор………………………………………….стр14
2.Определяем наибольший изгибающий момент на опорах А и B...стр16
3.Определяем набольший приведенный момент МПР ……….……..стр16
4.Определяем напряжение δИ (МПа) в опасном сечений вала 3…...стр16
3.3.5 Выбор подшипников качения………………………………….стр17
3.3.6 Расчет ошибки мертвого хода механизма на валике………....стр18
Список использованной литературы………………………………...стр19
Спецификация…………………………………………………………стр20
1 Техническое задание на курсовой проект. Механизм сельсинной следящей системы дистанционного управления.
Цены оборотов валиков (в отчетных единицах) сельсин - датчика и шкалы грубого отсчета:
АСД = 2 о.е
AШГО = 200 о.е
Параметры ШТО: цена деления HШТО = 0,2 о.е.; число делений NШТО = 50, число оборотов nШТО = 10÷16 об/мин.
Тип электродвигателя: УАД 12 – n = 2700 об/мин, MН = 25 Н*мм, МПУ = 25 Н*мм, D = 40 мм, L = 58мм, l = 13 мм, a = 15,5 мм, вес = 250 г.
Сельсин – датчик (СД) – тип НД – 404, МСД = 2,5 Н*мм.
Тип волнового зубчатого редуктора (ВЗР) – НГЖ.
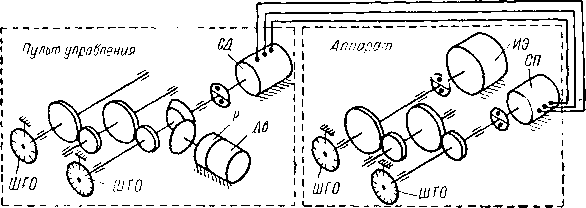
2 Принцип работы механизма. Структурная схема.
Угловые перемещения валика сельсина - датчика СД, устанавливаемого на пульте управления, осуществляются вручную или от электродвигателя ДВ через зубчатый редуктор Р. Для контроля точной установки валика СД в заданное положение используется отсчетное устройство с двумя шкалами для грубого и точного отсчета – ШГО и ШТО. На аппарате смонтирован такой же механизм, как на пульте управления, но без электродвигателя и редуктора. Он приводиться в движение сельсином – приемником электрической схемой, обеспечивающей синхронное вращения их валиков. Валик ШГО механизма аппарата связан муфтой с валиком исполнительного элемента, при вращений которого осуществляется настройка аппарата.
Рисунок №1

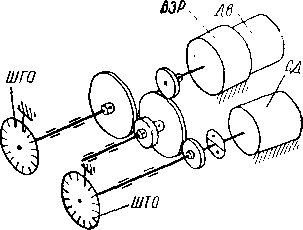
Комбинированный волновой зубчатый редуктор ВЗР с неподвижным гибким колесом 9 и зубчатой передачей имеет цилиндрический корпус 2, который винтами прикреплен к детали 15 корпуса механизма. Вращение валика двигателя ДВ передается колесами 8, 7 и 10 на генератор волн 11 принудительной деформаций гибкого колеса. Колесо 7 вращается на оси 6, которая прикреплена винтом 5 к стакану 4. Жесткое колесо 12, закрепленное на выходном валике 14 ВЗР, связано с валиком 25 ШТО зубчатыми колесами 16, 24 и 26. Крепление и центровка двигателя в корпусе ВЗР осуществляется деталями 1,3 и 4.
Для регулировке при сборке величины боковых зазоров между зубьями колес 17, 22 и 24, 26 с целью уменьшения мертвого хода между валиками 25 ШТО и 20 ШГО средний кронштейн 23 установлен в отверстие платы 18 с зазором. Сельсин – датчик СД закреплен на панели 15 посредством стакана 28 и соединен муфтой 27 с валиком 25. Лицевая деталь корпуса 19 с двумя стеклами 21 имеет форму коробки с прямоугольным фланцем для крепления механизма на пульте управления. Предусмотрена консистентная смазка шарикоподшипников и зубчатых зацеплений.
Рисунок №2
2
1

3
3э
4
4в
3
1
