

7. УРАВНОВЕШИВАНИЕ И БАЛАНСИРОВКА
ВРАЩАЮЩИХСЯ МАСС.
ВИБРОЗАЩИТА МАШИН
7.1. Цели уравновешивания и балансировки
При движении звеньев с переменными скоростями (с ускорением) возникают силы инерции и их моменты, которые принято называть динамическими нагрузками. Их возникновение приводит к вибрации и шуму, которые устраняются уравновешиванием звеньев при проектировании механизма. Это достигается соответствующим подбором масс и моментов инерции.
Для устранения малой неуравновешенности, возникающей после изготовления звеньев и их монтажа из-за несоблюдения размеров в процессе изготовления, неточности сборки, неоднородности материала, звенья балансируют.
7.2. Условия уравновешенности ротора
Деталь, вращающаяся
в опорах, называется ротором.
При вращении какой-либо i-й
массы m
на нее действует сила инерции, которую
можно разложить
на нормальную
![]() и тангенциальную
и тангенциальную
![]() составляющие (рис. 7.1).
составляющие (рис. 7.1).
Величины этих сил можно вычислить по формулам
 (7.1)
(7.1)
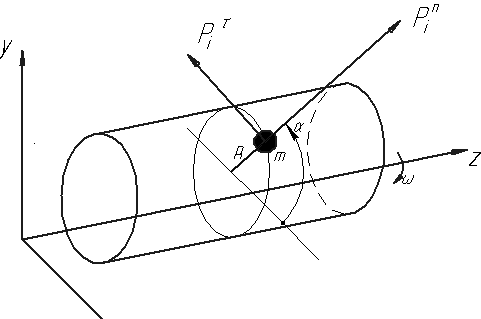
Рис. 7.1. Схема ротора
Спроектируем эти силы на оси х, у, z и определим моменты этих сил относительно осей:
 (7.2)
(7.2)
Подставив (7.1) в
(7.2) и просуммировав, получим (учитывая,
что
![]() ,
,![]() )
)
 (7.3)
(7.3)
Последнее уравнение
в (7.3) можно исключить, так как момент
![]() не создает дополнительной реакции в
опорах ротора.
не создает дополнительной реакции в
опорах ротора.
Силы
![]() и
и
![]() ,
моменты
,
моменты
![]() и
и
![]() равны нулю в том случае, если координаты
x
и y
массы m
расположены на оси вращения z
(т.е. центр масс ротора неподвижен):
равны нулю в том случае, если координаты
x
и y
массы m
расположены на оси вращения z
(т.е. центр масс ротора неподвижен):
![]() (7.4)
(7.4)
Это есть условие статической уравновешенности ротора.
Моменты и равны нулю, если центробежные моменты инерции ротора равны нулю:
![]() (7.5)
(7.5)
Это есть условие динамической уравновешенности ротора.
Выводы: ротор статически уравновешен, если его центр тяжести расположен на оси вращения; ротор динамически уравновешен, если его ось вращения является главной центральной осью инерции.
Уравновешенность
ротора можно охарактеризовать и силовыми
параметрами. Он статически уравновешен,
если главный вектор сил индукции
![]() .
Ротор динамически уравновешен, если
главный вектор моментов сил инерции
.
Ротор динамически уравновешен, если
главный вектор моментов сил инерции
![]() .
.
При проектировании роторов используют условия (7.4) и (7.5). При проверке уравновешенности изготовленных роторов используют условия и . Устранение остаточной неуравновешенности уже изготовленного ротора, возникшей по причинам неточности изготовления, монтажа, из-за неоднородности материала, из которого изготовлен ротор, называется балансировкой. Техника статической и динамической балансировки жестких роторов изложена в [6] и входит в содержание лабораторного практикума по дисциплине «Теория механизмов и машин».
7.3. Уравновешивание вращающихся масс
7.3.1. Уравновешивание масс, находящихся в одной плоскости
Положения отдельных
неуравновешенных масс
![]() ,
расположенных на роторе, можно
охарактеризовать величинами радиус-векторов
,
расположенных на роторе, можно
охарактеризовать величинами радиус-векторов
![]() относительно оси его вращения. Система
вращающихся масс будет уравновешена,
если главный вектор сил инерции,
действующих на эти массы при их совместном
вращении, равен нулю:
относительно оси его вращения. Система
вращающихся масс будет уравновешена,
если главный вектор сил инерции,
действующих на эти массы при их совместном
вращении, равен нулю:
![]() ,
,
где
![]() – сила инерции, действующая на i-ю
массу;
– сила инерции, действующая на i-ю
массу;
![]() – сила инерции уравновешивающей массы
– сила инерции уравновешивающей массы
![]() ,
расположенной на расстоянии
,
расположенной на расстоянии
![]() от оси вращения ротора.
от оси вращения ротора.
Сила инерции,
действующая на i-ю
массу, вращающуюся с постоянной скоростью
![]() ,
равна
,
равна
![]() .
.
Рассмотрим систему, состоящую из трех неуравновешенных вращающихся масс m1, m2 и m3 (рис. 7.2).
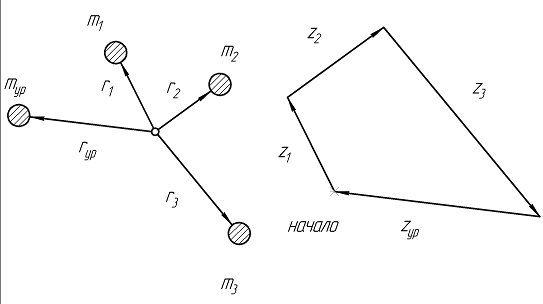
а б
Рис. 7.2. Система неуравновешенных масс (а) и план сил инерции (б)
Условием уравновешенности данной системы масс является уравнение
![]() .
.
Так как , то это уравнение можно записать в виде
![]() .
.
Так как
![]() (мы рассматриваем вращающуюся
систему масс), то
(мы рассматриваем вращающуюся
систему масс), то
![]() .
(7.6)
.
(7.6)
Уравнение (7.6) можно решить аналитическим и графическим методами.
При аналитическом методе решения составляются уравнения проекций сил на координатные оси, из которых находят являющееся неизвестным последнее слагаемое.
Найдем
![]() и
и
![]() графическим методом, то есть построением
векторного многоугольника (см. рис.
7.2б), являющегося графической интерпретацией
векторного уравнения (7.6). Предварительно
выбираем масштаб сил
графическим методом, то есть построением
векторного многоугольника (см. рис.
7.2б), являющегося графической интерпретацией
векторного уравнения (7.6). Предварительно
выбираем масштаб сил
![]() ,
,
где z1
– длина вектора, изображающего силу
![]() ,
(мм).
,
(мм).
Размерность
масштаба
![]() (если масса задана в кг,
радиус – в м).
(если масса задана в кг,
радиус – в м).
Переведем масштабом
![]() другие известные слагаемые уравнения
(7.6) в векторные отрезки:
другие известные слагаемые уравнения
(7.6) в векторные отрезки:
![]()
Тогда векторное уравнение (7.6) запишется в виде
![]() .
.
Построив векторный
силовой многоугольник (см. рис. 7.2б) в
масштабе
,
из него определим длину вектора
![]() .
Выбрав из конструктивных соображений
величину
,
вычисляем уравновеши-вающую массу
.
Выбрав из конструктивных соображений
величину
,
вычисляем уравновеши-вающую массу
![]() .
.
Поместив ее на роторе в направлении вектора на расстоянии от оси вращения, равном длине этого вектора, уравновесим ротор.