

Формат команд
Формат команд обработки данных группы ARM приведен на рис. 7. Эта команда будет выполнена, если условие Cond истинно, в противном случае команда будет пропущена. Все различные условия перечислены в табл. 2; если суффикс условия опущен, то команда выполняется безусловно.

Рис. 7. Команда обработки данных группы ARM
Команда формирует результат, выполняя указанную арифметическую или логическую операцию с одним или двумя операндами.
Первый операнд – всегда регистр (Rn). Второй операнд (shifter_operand) (табл. 3) может быть регистром со сдвигом (Rm), или 8-битной константой с циклическим сдвигом (#imm8) (в зависимости от значения бита "I" в команде). Следует отметить, что формат команды не позволяет записать константу боле 8 бит и, поэтому недопустимыми являются значения #0x1FF, #0x1FE, #0x1234. Однако, эта записанная в поле команды константа может автоматически циклически сдвигаться на любое четное значение (0, 2, 4, 6, .., 30) и, таким образом, программист может написать константы #0x12, #0xFF, #0x2FC0, #0xC000003F – значение поля сдвига формируется компилятором автоматически. Кроме того, следует знать, что команды, например, ADD и SUB, AND и BIC эквивалентны (комплементарны) за исключением соответственно отрицания и инвертирования операнда 2. Если циклически сдвинутая константа не может быть представлена в 8-битном поле, то используется комплементарная команда, если это не приводит к успеху – выдается сообщение об ошибке.
Флаги CPSR могут оставаться без изменений (S = 0) или выставлены в зависимости от результата выполнения этой команды (S = 1). Некоторые команды (ТSТ, TEQ, CMP, CMN) не записывают результат в регистр Rd. Они используются только для того, чтобы в зависимости от результата установить/сбросить флаги CPSR и, поэтому не включают поле S (предполагается S = 1).
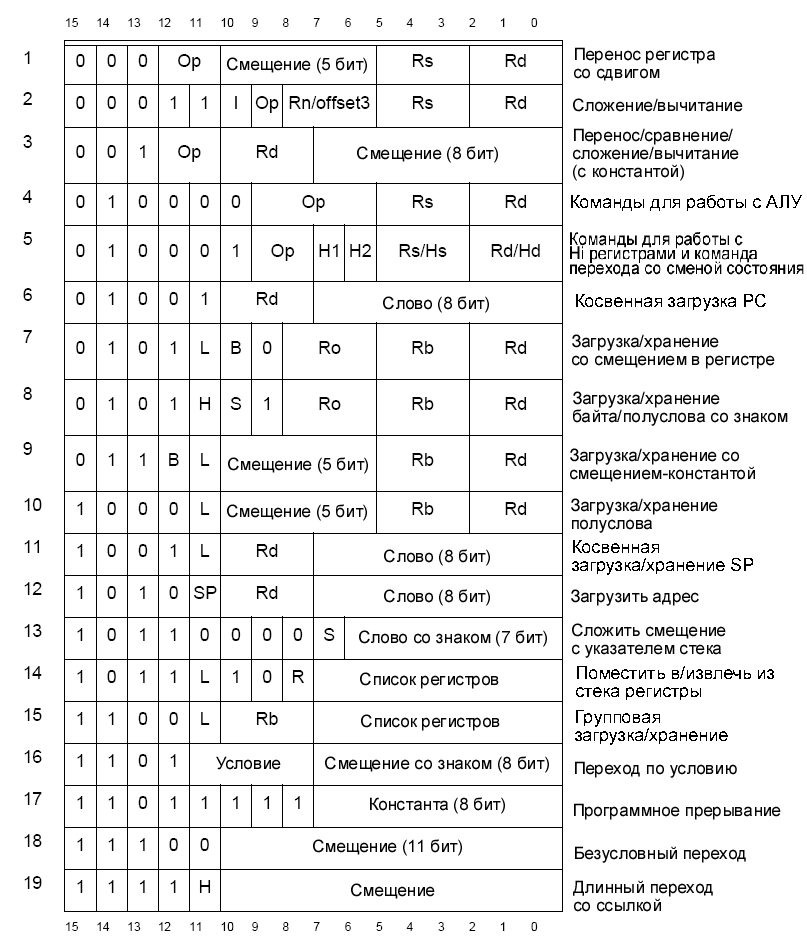
Ниже приведена полная таблица форматов команд набора инструкций ARM

Ниже приведены форматы команда обработки данных группы THUMB
Система команд
Далее приведена таблица 4, которая включает в себя краткое упрощенное описание команд ARM рассматриваемого микроконтроллера. Рассмотрены режим команды, мнемоника в ассемблере, способы адресации, действие команды, число циклов и слов (ЧС). В таблице приведены лишь основные режимы использования команд, она наглядна и понятна для восприятия – в большинстве случаев этого достаточно для использования команд; поле второго операнда Op2 заменяется любым выражением из последней колонки таблицы 3. Для простоты в командах обработки опущены поля {<cond>} (таблица 2, суффикс) и {S} (символ как таковой), если они присутствуют оба. Еще раз напомним, что команда не выполняется, если значение поля <cond> не соответствует полю флагов регистра состояния CPSR, а сгенерированный флаги не запоминаются, если отсутствует символ S. Полное описание каждой команды, включающее все детали и нюансы ее применения, содержится в учебном пособии “Справочник по системе команд”. Кроме того, удобно пользоваться справочной системой, открыв вкладку Books в окне Project Workspace и далее Complete User Guide – здесь Вы найдете информацию и об ассемблере, включая псевдо операторы организации программного кода, и о системе команд – последнее в разделе ARM Instruction Set User’s Guide.
В таблице 4 использованы следующие обозначения:
Rd, Rn, Rm, Rs – угловые скобки в адресах <Rd>, <Rn>, <Rm>, <Rs> этих регистров будут опускаться с целью экономии места в таблице;
cond – условие выполнения команды <cond> из табл. 2 (угловые скобки будут опускаться);
Op2 – один из способов представления операнда 2 <shifter_operand> из табл. 3 (угловые скобки будут опускаться);
* b – число машинных тактов, необходимых для выполнения пустых тактов сопроцессора, а S, I и C зависят от типа машинных тактов (информация взята с сайта http://www.gaw.ru)
Н – Непосредственная адресация
П – Прямая адресация
К – Косвенная адресация
И – Индексная адресация
cad – Command Address – метка, указывающая команду в ассемблерной программе, к выполнению которой следует перейти при определенных условиях. Фактически cad представляет собой 32-х разрядный адрес команды, но этот адрес автоматически преобразуется в относительной смещение со знаком rel и в таком виде храниться в формате команды
rel – относительное смещение со знаком между командой к выполнению которой следует перейти и командой перехода; диапазон возможных переходов зависит от формата команды – для команд B – ±32 Мбайта
#imm, #imm8, … – 8-битная константа (число бит определяется) с автоматическим циклическим сдвигом на любое четное значение (0, 2, 4, 6, .., 30)
РС (= R15) – Program Counter – счетчик команд
НС – непосредственное смещение
РгС – регистровое смещение
Таблица 4. Краткое представление инструкций ARM
|
Мнемоника |
Адр. |
Содержание |
Число циклов |
ЧС |
Примечание |
|
ADD R2, R4, Op2 |
П, Н |
(R2)← (R4) + (Op2) |
1S* |
1 |
Сложение |
|
ADC R5, R3,Op2 |
П, Н |
(R5) ← (R3)+(Op2) + (C) |
1S* |
1 |
Сложение с переносом |
|
AND R2, R4,Op2 |
П, Н |
(R2) ← (R4) & (Op2) |
1S* |
1 |
Логическое «И» , поразр. |
|
B{cond} Rn B{cond} cad B{cond} cad |
П Н Н |
(PC) ← (Rn) (PC) ←rel Если (cond), то (PC)←rel |
2S+1N |
1 |
Команда перехода |
|
BIC Rd,Rn,Op2 |
П, Н |
(Rd) ← (Rn) & (Op2>) |
1S |
1 |
Bit Clear поразрядно |
|
BL{cond} cad |
Н |
(R14) ← (R15); (R15) ← rel |
2 |
1 |
Branch with Link |
|
BX{cond} Rm |
П |
(R15) ← (Rm); еслиRm[0]=0, переключение вARMрежим; еслиRm[0]=1 – то вTHUMB. |
2S+1N |
1 |
Перейти и сразу переключить ядро в другой режим |
|
BLX{cond} Rm |
П |
(R15)← адрес след. истр. BXRm |
|
1 |
Запомнить адрес возврата |
|
CDP{cond} <coproc>, <opcode_1>, Rd, Rn, Rm {, <opcode_2>} |
П |
Сообщение сопроцессору (если он есть) выполнить операции (opcode_1), (opcode_2) |
1S+bI |
1 |
Coprocessor Data Processing |
|
CMP Rn, Op2 |
П, Н |
(Rn) – (Op2); установка флагов |
1S |
1 |
Rd не меняется |
|
CLZ{cond}Rd,Rm |
П |
(Rd) ← число нулевых битов до первого единичного бита в регистре (Rm) |
1 |
1 |
|
|
CMN{cond}Rn, Op2 |
П, Н |
(Rn) + (Op2); установка флагов |
|
1 |
Rd не меняется |
|
EOR Rd, Rn, Op2 |
П, Н |
(Rd) ← (Rn) (Op2) |
1S |
1 |
Исключающее ИЛИ поразрядно |
|
LDC{cond}{L} Coproc, CRd, [Rn] |
|
Передача данных между памятью и сопроцессором |
|
|
|
|
LDM | STM {cond} <mode> Rn{!}, <registers_without_pc> |
П.-И Пр.-И |
Загружает подмножество регистров. Поддерживает различные режимы стека. Эффективна для сохранения / восстановления контекста и передачи больших массивов данных |
nS+1N+ +11 |
1 |
Load Multiple |
|
LDR{cond}Rd, [Rn] |
П, К |
(Rd) ← ((Rn)) |
1S + 1N + 1I |
1 |
Load register |
|
LDR{cond} Rd, [Rn,#imm5] |
П, К |
(Rd) ← ((Rn)+imm5) |
1S + 1N + 1I |
1 |
Load register |
|
LDR{cond}Rd, cad |
П |
(Rd) ← (R15)+rel |
|
1 |
Загрузить адрес команды |
|
LDR{cond}B LDR{cond}H LDR{cond}SB LDR{cond}SH |
П |
Команды аналогичны LDR, но загружают соответственно байт (суффикс “B”), полуслово (суффикс “H”) и с расширением знака (суффикс “S”) |
|
1 |
|
|
MCR{cond} p6,0,R4,c5,c6
|
П, К |
(c6) ← p6 execute (opcode 0) with (R4) |
1S+(b+1)*I+1C |
1 |
Регистровый обмен с сопроцессором |
|
MLA Rd, Rm, Rs, Rn |
П |
(Rd) ← (Rm)*(Rs) + (Rn);
|
1S+I* *(m+1) |
1 |
Умножение с накоплением |
|
MOV Rd, Op2 |
П, Н |
(Rd) ← (Op2) |
1 |
1 |
Move |
|
MRC<cond> <coproc>, <opcode_1>, Rd, <CRn>, <CRm> {, <opcode_2> |
П, К |
Передача данных из сопроцессора в ARM регистр |
1S+ +(b)I+1C |
1 |
|
|
MRS Rd, SPSR MRS Rd, CPSR |
П |
(Rd)← (SPSR) (Rd) ← (CPSR) |
1 |
1 |
Чтение статусного рег. |
|
MSR{cond} SPSR_<fields>, Rm MSR{cond} CPSR_<fields>, Rm MSR{cond} SPSR_<fields>, #imm8 MSR{cond} CPSR_<fields>, #<immed_8r> |
П |
(SPSR) ← (Rm)
(CPSR) ← (Rm)
(SPSR) ← imm8
(CPSR) ←imm8
|
1 |
1 |
Move to Status Register –Запись в статусный регистр |
|
MUL Rd,Rm,Rs |
П |
(Rd) ← (Rm)*(Rs) |
2 |
1 |
Умножение |
|
MVN Rd, Op2 |
П, Н |
(Rd) ← (Op2>) |
1 |
1 |
Загрузка инверсного значения |
|
NOP |
П |
Нет операции; не может использоваться с cond |
1 |
1 |
No OPeration |
|
ORRRd, Rn, Op2 |
П, Н |
(Rd) ← (Rn) OR (Op2) |
1 |
1 |
Поразрядно |
|
RSB Rd,Rn, Op2 |
П, Н |
(Rd) ← (Op2)– (Rn) |
|
|
Reverse subtract |
|
RSС Rd Rn Op2 |
П, Н |
(Rd)←(Op2)–(Rn)– (C) |
|
|
with carry |
|
SBCRd,Rn, Op2 |
П, Н |
(Rd) ← (Rn)–(Op2)– (C) |
1 |
1 |
Вычитание с учетом переноса |
|
SMULBB{cond} Rd,Rm,Rs SMULBT{cond} Rd,Rm,Rs SMULTB{cond} Rd,Rm,Rs SMULTT{cond} Rd,Rm,Rs |
П |
(Rd)←Rm[15:0]*Rs[15:0]
(Rd)←Rm[15:0]*Rs[31:16]
(Rd)←Rm[31:16]*Rs[15:0]
(Rd)←Rm[31:16]*Rs[31:16] |
4 |
1 |
Умножение знаковых 16-битных операндов с 32-битным знаковым результатом |
|
SMLAL<x><y><cond><RdLo>,<RdH1>, Rm,<Rs> |
Пост-И, пред-И |
(RdHi):(RdLo)← (Rm)*(Rs)+(RdHi):(RdLo) |
1S+I* *(m+2) |
1 |
Умножение знаковых 16-битных операндов с 64-битным аккумулированием |
|
STC{cond}{L} <coproc>, <CRd>, <addressig_mode> |
П-И, Пр-И |
Сохранение регистров сопроцессора непосредственно в памяти |
(n-1)S+ +2N+bl |
1 |
|
|
STR{cond} Rd, [<Rb>, #Imm] |
К с НС |
((Rb)+Imm)←(Rd) |
2N |
1 |
Store register |
|
STR{cond} Rd, [<Rb>,<Ro>] |
К с РгС |
((Rb)+(Ro)) ←(Rd) |
2N |
1 |
|
|
STR{cond}Rd,cad |
П |
(R15)+rel ←(Rd) |
2N |
1 |
Сохранить адрес команды |
|
STR{cond}B |
|
Аналогично STR, но сохраняет байт, аRdможет быть только R0, R2, R4, R6, R8, R10, R12 |
2N |
1 |
|
|
STR{cond}H |
|
Аналогично STR, но сохраняет полусловоRd[15:0] |
2N |
1 |
|
|
SUBR2,R4, Op2 |
П |
(R2) ← (R4) – (Op2) |
1 |
1 |
Вычитание |
|
SUB Rd,PC,#imm3 |
П, Н |
(Rd)← (PC) – imm3 |
2S+1N+ +1I |
1 |
Вычесть смещение, заданное в # imm3 из содержимого рег-ра PC |
|
SWI{cond} <imm24> |
Н |
(PC) ←0x08; (SPSR_svc) ← (CPSR); переключение в режим Supervisor |
2S+1N* |
1 |
Прогр. прерывание |
|
SWP{cond} Rd, Rm, [Rn] |
П, К |
(Rd) ← ((Rn)); ((Rn)) ← (Rm) |
2S+1N+1I* |
1 |
Обмен между регистрами и памятью словами |
|
SWP{cond}BRd,Rm, [Rn] |
П, К |
Аналогично SWP, но пересылаются байты без знака |
2S+1N+1I* |
1 |
|
|
TEQ{cond}Rn,Op2 |
П, К |
(Rn)(Op2) ; установка флагов |
1 |
1 |
Тестирование по исключающему ИЛИ |
|
TST{cond}Rn,Op2 |
П, К |
(Rn) & (Op2), установка флагов |
1 |
1 |
|
Список литературы по LPC2000
Интегрированная среда Keil μVision3: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”/ Сост.: М. С. Куприянов, И. С. Зуев, Д.А.Варакин.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С., Варакин Д.А. Порты ввода/вывода микроконтроллеров семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С. Архитектура микроконтроллеров семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Справочник по системе команд микроконтроллера LPC2000 на базе ARM-ядра. Учебное пособие к лабораторным работам по дисциплине “Микропроцессорные системы”/ Сост.: М. С. Куприянов, И. С. Зуев.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С., Варакин Д.А.. Система прерываний микроконтроллеров семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С. Таймеры микроконтроллеров семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С. Модуль ШИМ семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С. Аналого-цифровой преобразователь семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С., Варакин Д.А. Универсальный асинхронный приемопередатчик семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы””.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.
Куприянов М. С., Зуев И.С., Варакин Д.А. Интерфейс SPI семейства LPC2000: Методические указания к лабораторным работам по дисциплине “Микропроцессорные системы”””.– СПб.: СПбГЭТУ “ЛЭТИ”, каф. ВТ, в электронном виде, 2008.