7. Курсовое проектирование
Курсовое проектирование по ОТУ подразумевает законченную процедуру проектирования устройства управления подвижным объектом. В него входят все составные части реальной разработки системы управления (СУ):
разработка блок - схемы системы управления;
описание объекта управления (ОУ);
определение наблюдаемых и управляемых переменных;
создание математической модели ОУ;
построение математической модели системы;
анализ характеристик СУ;
синтез корректирующих устройств.
7.1. Разработка блок-схемы системы управления
В настоящем разделе формулируется проблема, которую должна решить система автоматического управления, определяются входные и выходные переменные ОУ, составляется структурная схема предполагаемой системы управления.
В качестве примера рассмотрим задачу обеспечения вертикальной устойчивости велосипеда. Подобные объекты принадлежат к классу неустойчивых объектов, получившему название «перевернутый маятник».
Чтобы удержать велосипед в вертикальном положении, велосипедист поворачивает руль в направлении падения. Примем руль за управляющую (входную) переменную. Выходной переменной будет угол у отклонения от вертикальной плоскости. Этот угол легко измерить: для этого достаточно, например, на ось потенциометра повесить грузик, а ось расположить горизонтально. Получилось звено обратной связи. Чтобы поворачивать руль, закрепим на нем шестеренку, сцепленную с шестерней, сидящей на валу электродвигателя постоянного тока. Сам электродвигатель закрепим на раме - на втулке переднего колеса. Вместе с рулем это будет исполнительный механизм (рис. 7.1).
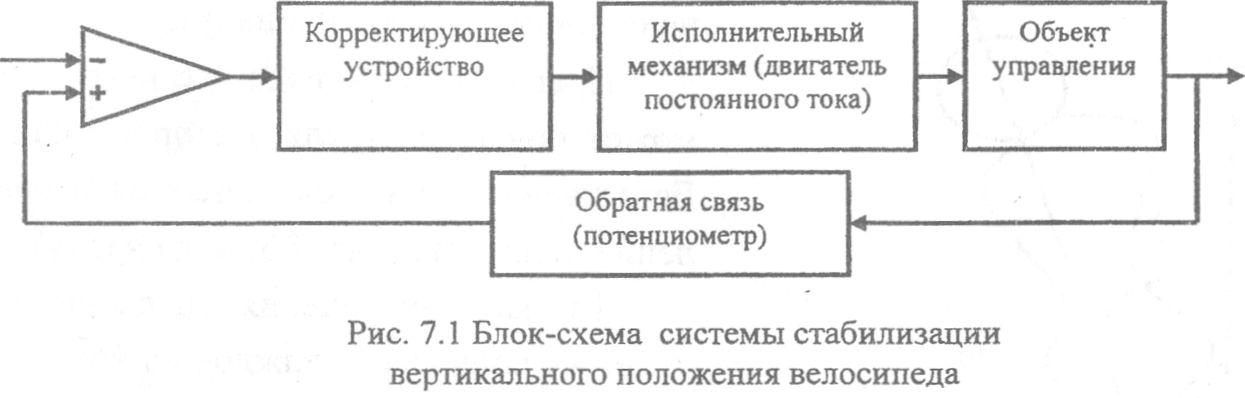
Устройством управления в такой системе будет дифференциальный усилитель, на прямой вход которого подается сигнал задающего устройства (велосипедиста), а на инверсный - напряжение потенциометра обратной связи. Тогда усилитель одновременно будет выполнять функцию устройства сравнения. Но для управления неустойчивым объектом этого мало: в замкнутом состоянии такая система останется неустойчивой. Поэтому главной задачей курсового проекта является синтез корректирующего устройства, способного обеспечить заданное качество управления. Для решения этой задачи необходимо получить математическую модель всех блоков системы и провести анализ ее динамических характеристик. Разработанная блок-схема приведена на рис. 7.1.
7.2. Составление математической модели оу
Для построения математической модели динамических звеньев используются дифференциальные уравнения, получаемые на основе физических законов механики, термодинамики, оптики.
Примеры составления таких дифференциальных уравнений можно найти, например, в рекомендованной литературе. Как правило, это классические объекты автоматического управления: ракета, самолет, спутник, торпеда. Авторы рассмотрят более простой и знакомый пример - велосипед.
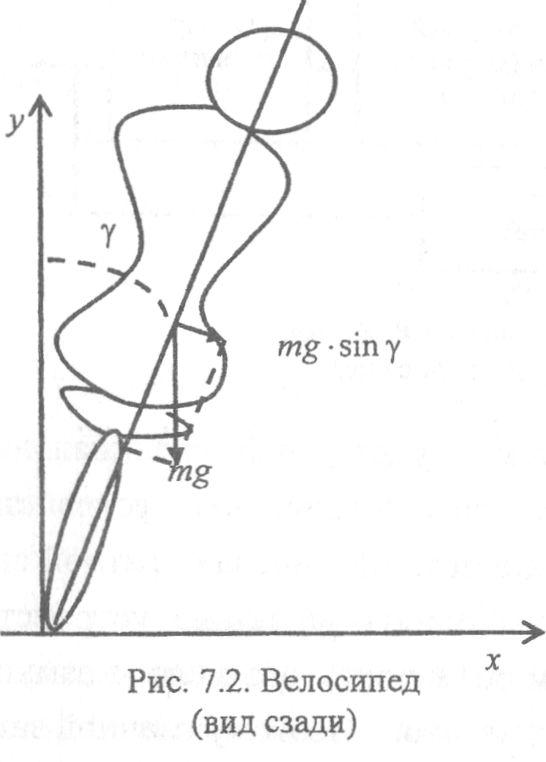
Математическая модель системы «велосипед + велосипедист». При смещении центра тяжести велосипедиста относительно вертикальной оси возникает крутящий момент, приводящий к падению:
![]()
где h — расстояние от центра масс до точки касания с землей; т — масса
велосипеда; g - ускорение свободного падения; у - угол наклона (рис. 7.2).
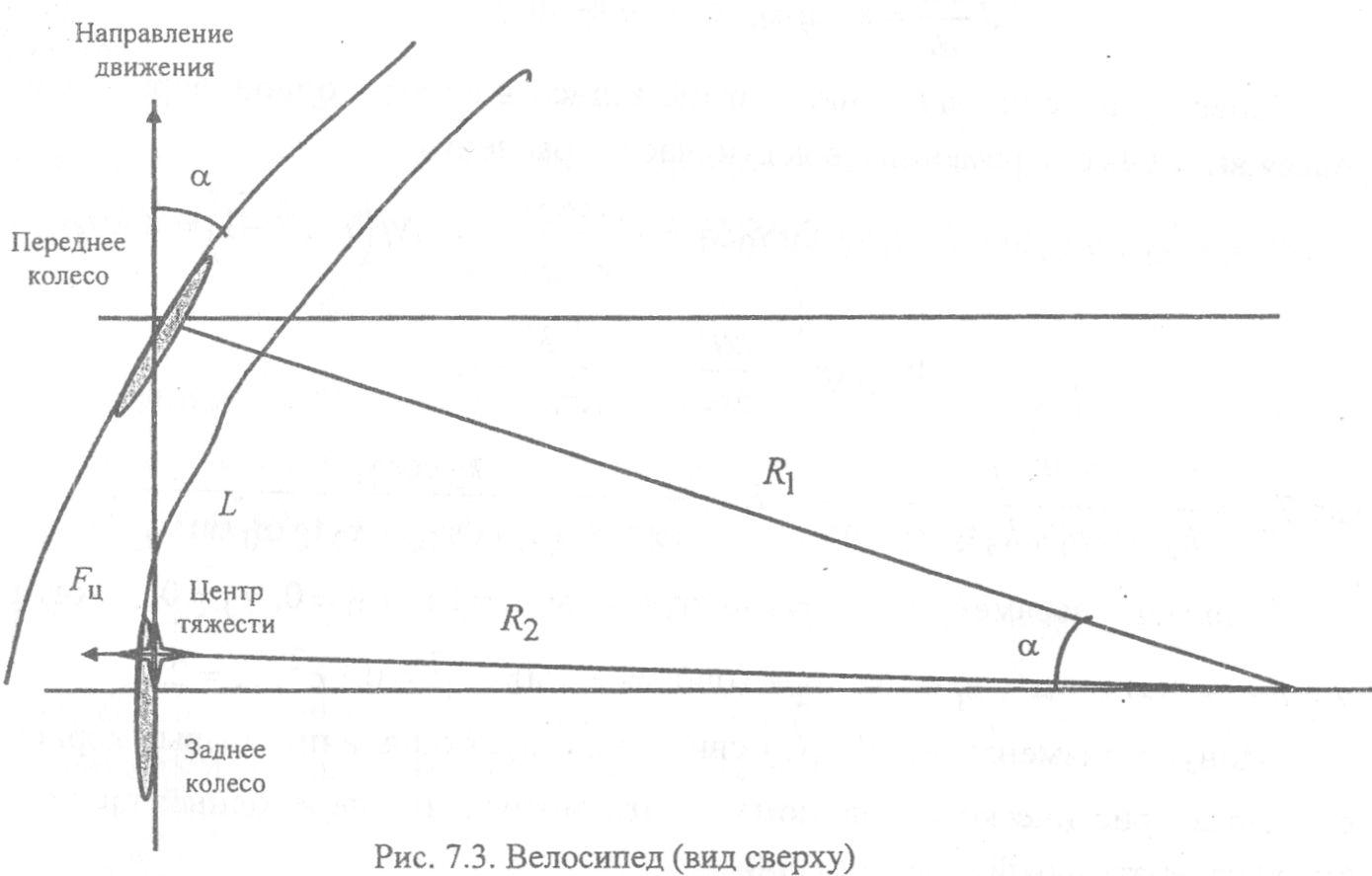
Препятствовать падению велосипедист может поворотом руля в сторону падения. Естественно, при этом меняется и направление движения (рис. 7.3, вид сверху).
Так как направления движения обоих колес не совпадают, каждое из колес должно двигаться по траекториям, касательные к которым в точках контакта с землей совпадают с плоскостью колеса. Поскольку такое несогласованное движение невозможно, поворот переднего колеса вызовет поворот рамы и с нею - поворот заднего. Заднее колесо при этом получает боковое проскальзывание, что можно наблюдать по фонтану брызг при повороте на луже. Это же является причиной заноса автомобиля, поворачивающего на большой скорости.
В
результате траекторией движения обоих
колес будет окружность с одним и тем
же центром, но с разными радиусами: у
переднего колеса радиус поворота больше,
чем у заднего![]()
Если
расстояние между точками касания колес
с землею обозначить L,
то![]() Вращение
приведет к появлению центробежной
Вращение
приведет к появлению центробежной
силы![]() ,
приложенной к центру тяжести.
,
приложенной к центру тяжести.
Положение центра тяжести зависит от наклона тела велосипедиста. Для варианта «мастер» эта точка близка к середине расстояния между точками
касания с землей, для варианта «чайник» центр тяжести (точнее, его проекция на горизонтальную плоскость) практически совпадает с точкой касания земли вторым колесом. Вернемся теперь в вертикальную плоскость и определим радиус вращения центра тяжести велосипедиста.
При
малых углах наклона:![]() Возникающая
Возникающая
Положив
в уравнении (7.1)![]() ,
имеем:
,
имеем:
при
таком вращении центробежная сила![]() Теперь уравнение движения будет иметь
вид
Теперь уравнение движения будет иметь
вид
Согласно рис. 7.1, выходная величина ОУ - угол наклона велосипеда у, входная - угол поворота руля а. Разделить переменные в несепарабельном уравнении можно, если воспользоваться первыми членами разложения в ряд Тейлора:
![]()
Теперь уравнение движения можно записать в операторной форме, перенеся выходные переменные в левую часть уравнения:
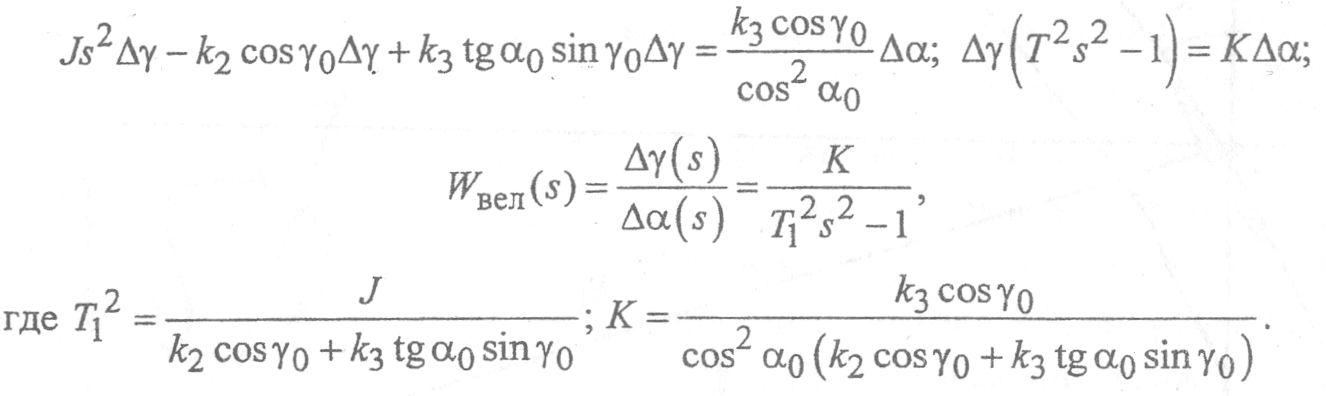
Зададим
параметры:![]() тогда
тогда
![]()
Минус
в знаменателе![]() свидетельствует
о наличии правых корней
свидетельствует
о наличии правых корней
его характеристического полинома. А это значит, что переходный процесс будет колебательный и расходящийся.
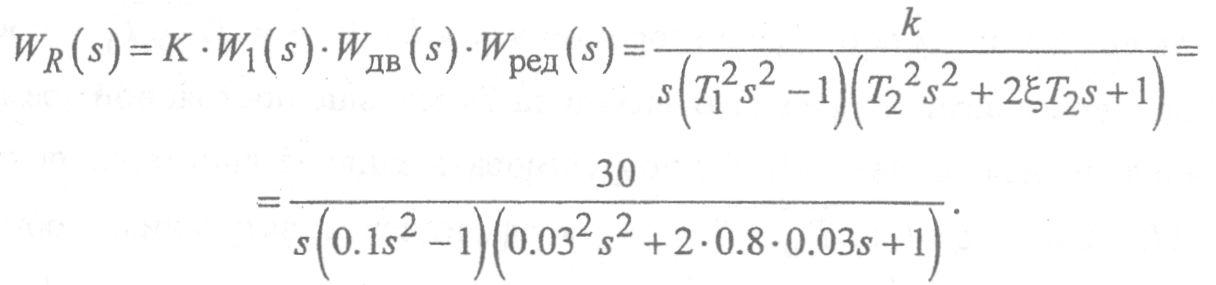
Передаточная функция разомкнутой системы управления. Итак, получив передаточную функцию объекта управления
![]()
зададим передаточные функции остальных звеньев системы.
![]()
Вычтем из последнего уравнения уравнение статики:
![]()
•
Электродвигатель
с редуктором.
При батарейном питании выбираем двигатель
постоянного тока. Его динамика определяется
двумя постоянными времени: электромеханической
постоянной, зависящей от момента инерции
якоря![]() ,
и электромагнитной постоянной времени
,
и электромагнитной постоянной времени![]() ,
зависящей от индуктивности ротора.
Если
,
зависящей от индуктивности ротора.
Если![]() и
и![]() отличаются
меньше, чем на порядок, их совместное
действие описывается типовым колебательным
звеном
отличаются
меньше, чем на порядок, их совместное
действие описывается типовым колебательным
звеном
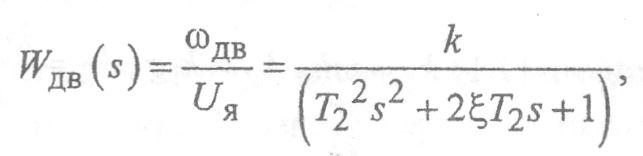
где
к -
статический коэффициент преобразования
входного напряжения в скорость вращения;
вместе с редуктором примем
к
= 1;![]() -
посто
-
посто
янная времени двигателя, реальная величина Т2 меньше постоянной времени велосипеда на два порядка. Чтобы почувствовать влияние двигателя, примем
![]() -
коэффициент затухания, обычно
-
коэффициент затухания, обычно
![]()
Если выходной величиной считать не скорость вращения двигателя, а угол его поворота, в передаточную функцию следует добавить оператор интегрирования 1 / s . Часто функцию интегрирования отводят редуктору. Тогда
![]()
• Усилитель. В статической системе коэффициент усиления (всей прямой цепи) выбирается исходя из допустимой ошибки управления. Если ошибку управления z(t) представить в виде ряда Маклорена:
![]() (х
- входное воздействие), то для
(х
- входное воздействие), то для
статической системы коэффициенты ошибки могут быть получены из передаточной функции W(s) разомкнутой системы:
![]() -
коэффициент статической ошибки;
-
коэффициент статической ошибки;
![]() -
коэффициент ошибки по скорости
(и
-
коэффициент ошибки по скорости
(и![]() -
коэффи
-
коэффи![]() циенты
числителя и знаменателя
W(s)
при
циенты
числителя и знаменателя
W(s)
при![]() ).
).
Тогда в статической системе ошибка управления в статике:
![]()
Для систем с интегратором (астатических) ошибка в статике равна нулю при любом коэффициенте усиления. Однако коэффициент ошибки по скорости Cj = 1 / к. Если принять максимальную начальную скорость падения велосипедиста равной 1 рад/с, для обеспечения максимального отклонения от вертикали на ±2° получим:
![]()
Окончательно передаточная функция разомкнутой системы: