

Курсак по ОТУ - Электро - Насос / koo / nasos
.docxПри батарейном питании выбираем электронасос постоянного тока. Его динамика определяется двумя постоянными времени: электромеханической постоянной, зависящей от момента инерции якоря ТЭМ, и электромагнитной постоянной времени Ta, зависящей от индуктивности ротора. Если ТЭМ и Ta отличаются меньше, чем на порядок, их совместное действие описывается типовым колебательным звеном
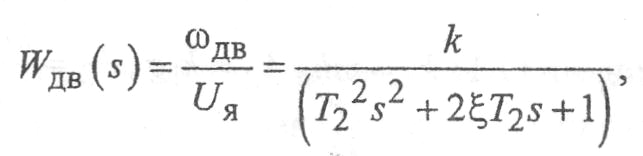
где k – статический коэффициент преобразования входного напряжения в скорость вращения, примем k = 1;
 – постоянная
времени электронасоса, примем
– постоянная
времени электронасоса, примем

 – коэффициент
затухания, обычно
– коэффициент
затухания, обычно
 ,
примем
,
примем
 .
.
В статической системе коэффициент усиления (всей прямой цепи) выбирается исходя из допустимой ошибки управления. Если ошибку управления ε(t) представить в виде ряда Маклорена:
![]() (х
– входное воздействие), то для статической
системы коэффициенты ошибки могут быть
получены из передаточной функции W(s)
разомкнутой системы:
(х
– входное воздействие), то для статической
системы коэффициенты ошибки могут быть
получены из передаточной функции W(s)
разомкнутой системы:
![]() –
коэффициент
статической ошибки;
–
коэффициент
статической ошибки;
![]() –
коэффициент
ошибки по скорости (α1
и β1
– коэффициенты числителя и знаменателя
W(s)
при
s1).
–
коэффициент
ошибки по скорости (α1
и β1
– коэффициенты числителя и знаменателя
W(s)
при
s1).
Тогда в статической системе ошибка управления в статике:
![]()
Для систем с интегратором (астатических) ошибка в статике равна нулю при любом коэффициенте усиления. Однако коэффициент ошибки по скорости C1 = 1 / k. Если принять максимальную начальную скорость погружения равной 1 м/с, для обеспечения максимального отклонения по вертикали на 0.1 м получим:
![]()