

В) Дифференциальная измерительная схема
|
Рис. 10 Дифференциальная схема измерения |
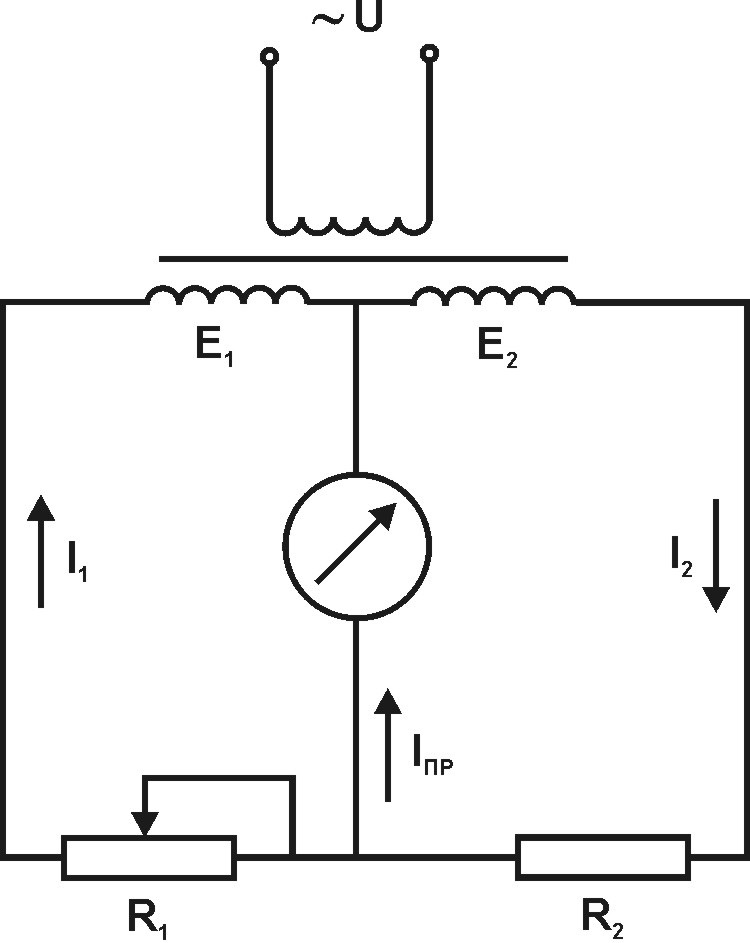
Дифференциальная схема проще мостовой и имеет большую чувствительность.
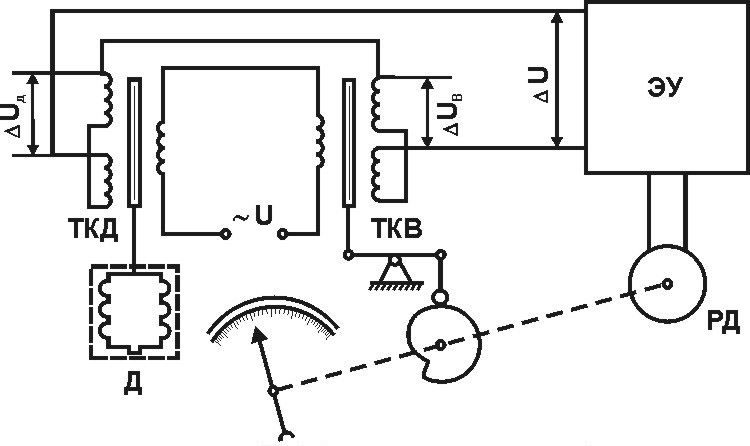
Г) Дифференциально-трансформаторная система дистанционной передачи
Эта система работает по принципу компенсации разности трансформированных напряжений в катушках первичного и вторичного приборов, соединенных последовательно.
Вторичная обмотка каждой катушки выполнена в виде двух секций с одинаковым число витков, причем включены эти секции во встречном направлении. Смещение плунжера внутри катушки вызывает появление напряжение разбаланса на выходе этой катушки. Обе катушки включены по дифференциальной схеме навстречу друг другу.
Если под действием измерительного устройства первичного прибора плунжер переместится, появится в этой катушке напряжение разбаланса; это же напряжение станет разбалансом и для обоих катушек: ΔU = ΔUд - ΔUв. Т.к. сигнал очень слаб, его направляют на усиление в электронный усилитель(ЭУ). Переменное напряжение, усиленное им, приводит во вращение реверсивный двигатель (РД). На оси последнего установлен профильный кулачок, который при помощи рычага перемещает сердечник катушки вторичного прибора. Сердечник перемещается в сторону уменьшения рассогласования, и когда напряжение, поступающие от катушек, будут
|
Рис. 11 Дифференциально-трансформаторная система передачи |
д)
Д) Сельсинная система дистанционной передачи
Синхронную связь в системах автоматики можно осуществлять с помощью сельсинов, которые похожи по конструкции и схеме на трехфазные синхронные генераторы. На роторе однофазная обмотка возбуждения. При подаче в нее тока в трехфазной обмотке статора будет появляться ЭДС в зависимости от положения ротора относительно статора, т.е. поворот ротора пропорционален величине ЭДС статора. Если соединить соответствующие фазы двух сельсинов (один будет датчиком, второй – приемником) и питать их роторы от одной сети, то при повороте сельсина-преобразователя под воздействием синхронизирующего момента сельсина-приемника его ротор будет поворачиваться до тех пор, пока не займет такое же положение, что и ротор первого сельсина, а угол рассогласования не станет равным нулю. Т.е. сельсин-приемник постоянно отрабатывает угол рассогласования с сельсином-преобразователем (рис.12).
|
Рис. 12 Сельсинная схема дистанционной передачи угла поворота |
