

Автоматические регуляторы [ 5 ]
1. По способу связи или действия бывают:
- Регуляторы прямого действия - приводятся в действие усилием развиваемым измерительной системой регулятора при изменении величины регулируемого параметра. Они не имеют усилителей и не используют посторонней энергии. Относительно низкая чувствительность, связанная с преодолением сил трения во всех подвижных соединениях, приводит к регулированию не плавному, а толчками - после достижения необходимого усилия.
- Регуляторы непрямого действия - в них усилие, возникающее в чувствительном элементе, при изменении величины регулируемого параметра включает в работу вспомогательное устройство - управляющий элемент - которое открывает доступ энергии от постороннего источника (жидкость под давлением, сжатый воздух, электроэнергия) в механизм, развивающий усилие, которое необходимо для перестановки регулирующего органа.
2. По роду энергии, применяемой для приведения в действие исполнительного механизма, регуляторы непрямого действия делят на: гидравлические, пневматические, электрические и комбинированные (электрогидравлические и электропневматические). Последние могут быть расположены на значительном расстоянии от регулирующего органа (в отличие от двух первых).
3. По виду регулируемого параметра: регуляторы температуры, давления, влажности, расхода, уровня и т.д.
Зона нечувствительности регулятора - удвоенная величина наименьшего изменения регулируемого параметра, при котором приводится в действие регулирующий орган.
4. По характеру воздействия на регулирующий орган бывают:
- регуляторы прерывного действия - характеризуются тем, что при непрерывном изменении регулируемого параметра регулирующий орган их действует периодически (в том числе электрические позиционные регуляторы, в которых электродвигатель работает периодически при замыкании контактов в регуляторе);
|
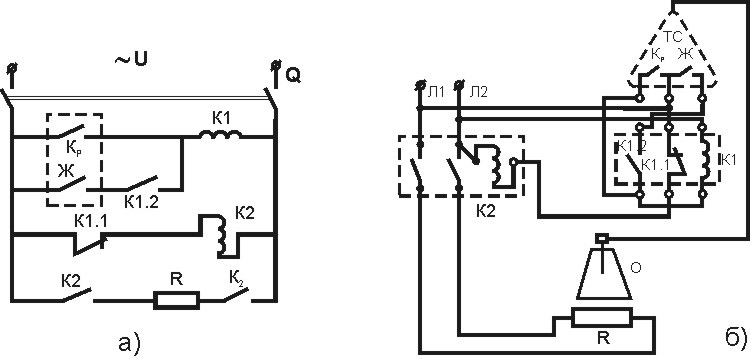
Рис. 31 Схема цепи регулирования температуры (позиционный регулятор) а) принципиальная схема, б) монтажная схема |
- регуляторы непрерывного действия - в них при изменении регулируемого параметра непрерывно меняется и положение регулирующего органа.
5. По характеру действия бывают:
- Позиционные регуляторы - те, у которых регулирующий орган может занимать два или три определенных положения. У двухпозиционых - это полностью открытое или полностью закрытое; приостановка регулирующего органа происходит почти мгновенно. У трехпозиционных - это полностью открытое, среднее (нормальное) и полностью закрытое (рис.31).
Самые распространенные двухпозиционные регуляторы имеют следующие особенности: процесс регулирования сопровождается резкими изменениями потребления энергии, регулирующий параметр колеблется около среднего значения, а величина и продолжительность его отклонений от заданного значения зависят от свойств регулируемого объекта и ширины нейтральной зоны (между линиями минимума и максимума в обе стороны от линии задания). Эти регуляторы можно применять для регулирования объектов, обладающих малым запаздыванием, значительной емкостью и небольшой чувствительностью.
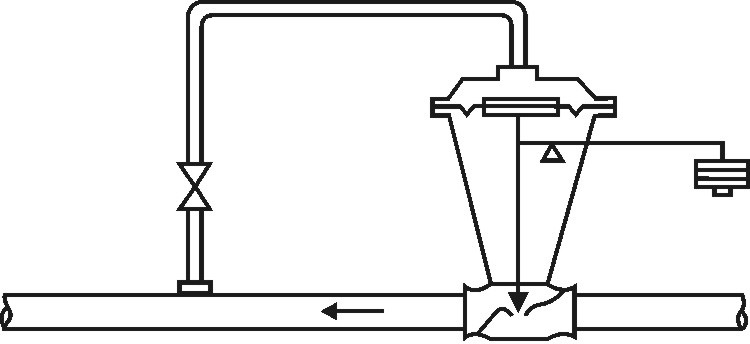
- Интегральные (астатические) регуляторы (ИР) поддерживают регулируемую величину таким образом, что скорость перемещения регулирующего органа пропорциональна отклонению этой величины от заданного значения. Из уравнения закона регулирования этого регулятора следует, что регулирующее воздействие ИР пропорционально интегралу отклонения регулируемой величины от ее заданного значения, т.е. регулирующее воздействие будет тем больше, чем больше отклонится регулируемая величина от задания (т.е. чем больше рассогласование) и чем длительнее это отклонение. Скорость перемещения регулирующего органа может быть постоянной или переменной. ИР инерционен. Может быть использован в объектах с самовыравниванием, с небольшим запаздыванием и при медленных изменениях нагрузки (рис.32).
|
Рис. 32 Схема интегрального регулятора давления прямого действия |
- Пропорциональные (статические) регуляторы (ПрР) - те, у которых величина перемещения регулирующего органа пропорциональна отклонению регулируемого параметра от заданного значения. Имеют механизм пропорциональности с помощью которого устанавливается соответствующий предел пропорциональности: диапазон дросселирования или зону регулирования. Это - участок шкалы регулятора, выраженный в % от всей шкалы, в пределах которого изменение регулируемого параметра вызывает перемещение регулирующего органа из одного крайнего положения в другое.
Например, в регуляторе с пределом пропорциональности 60, отклонение измерительной стрелки на 60% шкалы вызовет полное перемещение клапана, а отклонение стрелки на 1% шкалы перемещает клапан на 1/60 его полного хода.
Настраивается регулятор вручную. Чем больше зона регулирования, тем на меньшую величину перемещается регулирующий орган при одном и том же изменении параметра; при нормальных условиях этого достаточно для поддержания параметра на заданном значении с незначительными отклонениями. Регулятор, настроенный на малые пределы пропорциональности, обеспечивает большое перемещение регулирующего органа, что может приводить к перерегулированию и значительным колебаниям параметра в объекте регулирования.
|
Рис. 33 Пропорциональный регулятор уровня непрямого действия |
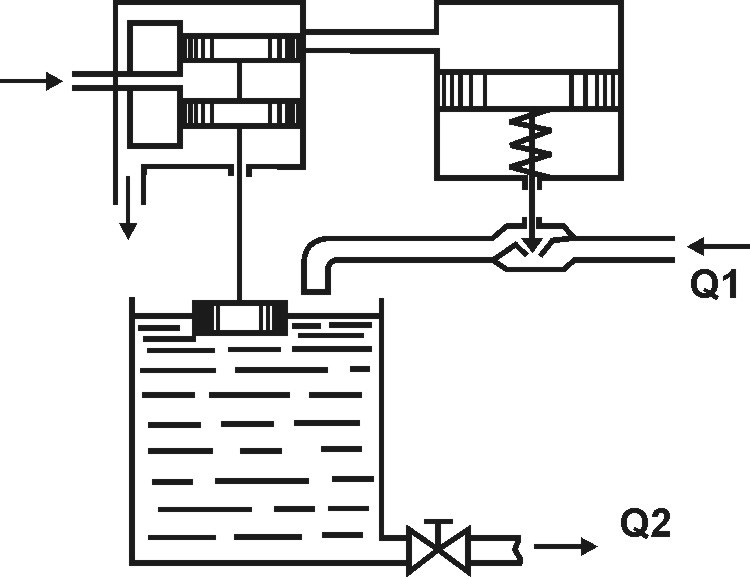
ПрР (рис.33) можно применить почти для всех объектов регулирования, за исключением случаев большого запаздывания и резких колебаний нагрузки. При регулировании объектов с большим коэффициентом емкости и без запаздывания надо пользоваться малым пределом пропорциональности.
Если несколько регуляторов работают в одной общей системе регулирования, пределы пропорциональности у них должны быть разными, во избежание появления т.н. «раскачки» (незатухающих колебаний в системе).
- Изодромные (пропорционально -интегральные) регуляторы (ИзР) в динамическом отношении подобны системе из двух параллельно включенных регуляторов – пропорционального и интегрального, и поддерживают регулируемый параметр на заданном значении без остаточного отклонения. У ИзР регулирующий орган принимает положение, зависящее от величины отклонения регулируемого параметра, т.е. он действует вначале как ПрР. Затем регулирующий орган совершает дополнительное перемещение, необходимое для ликвидации возникшего отклонения от заданного значения, т.е. действует в последующий период как ИР. Астатическая составляющая называется изодромом. Пропорциональное действие в регуляторе практически происходит немедленно, а изодромное - замедленно. ИзР применяют при быстро и резко меняющихся нагрузках и при регулировании объектов регулирования как с самовыравниванием, так и без него, с малым коэффициентом емкости, а также при наличии передаточного запаздывания.
- Пропорционально-интегральные регуляторы с производной производят перемещение регулирующего органа пропорционально отклонению, интегралу и скорости изменения регулируемой величины. Если время предварения регулятора (коэффициент при производной) = 0, то данный регулятор превращается ИзР; если кроме того, время изодрома стремится к бесконечности, то получается ПрР.
Выбор типов регуляторов и параметров их настройки
Во время работы промышленные системы регулирования подвержены действию возмущений самого разнообразного вида. Возмущения, как правило, входят в регулируемый объект по нескольким каналам. В этих условиях настройка, оптимальная по отношению к возмущению, входящему по одному каналу, в общем случае не будет оптимальной для возмущения такого же вида, но входящего по другому каналу. Например, при регулировании температуры в печи обжига возмущение может поступать в виде изменения температуры материала и виде изменения давления горючего газа.
Заданное значение регулируемой величины вырабатывается специальным устройством и вводится в систему в виде воздействия, которое называют управляющим.
Помимо перечисленных ранее основных функциональных элементов (элемента задания, чувствительного элемента, элемента сравнения и усилителей), в регуляторы вводят корректирующие элементы. Они необходимы для получения требуемого закона регулирования, в соответствии с которым осуществляет регулирующее воздействие в зависимости от изменения рассогласования. Так, например, регулятор может перемещать регулирующий орган пропорционально величине рассогласования или пропорционально сумме рассогласования и интеграла от него и т.п.
Одной из основных задач при разработке системы регулирования является выбор более подходящего для данного объекта закона регулирования.
Чтобы выбрать регулятор, необходимо знать динамические характеристики объекта регулирования; условия работы регулятора – требования к качеству регулирования и возмущения технологического процесса; показатели качества регулирования, которые можно получить при установке серийных регуляторов различных типов на объектах с разными динамическими свойствами.
Тип регулятора (непрерывный, релейный или импульсный) можно ориентировочно выбрать по величине отношения запаздывания τ к постоянной времени объекта Т, т.е. τ / Т. При τ / Т 0,2 выбирают релейный регулятор, при τ / Т 1 – импульсный или непрерывный.
Основной целью настройки автоматического регулятора на объекте является выбор (расчет) и установка необходимых значений переменных параметров регулятора: коэффициента передачи, времени изодрома и предварения. Все выпускаемые промышленностью серийные автоматические регуляторы снабжены специальным приспособлением для установки этих параметров. Изменяя параметры настройки регулятора, тем самым устанавливают определенные значения постоянных коэффициентов в уравнении регулятора (закона регулирования) и при определенных динамических свойствах объекта добиваются необходимого по условиям технологии качества регулирования.
Чтобы найти параметры настройки, надо выбрать тип процесса регулирования и знать динамические параметры объекта: запаздывание τ , постоянную времени Т, их отношение τ / Т, коэффициент передачи объекта коб.
Приближенные значения параметров настроек непрерывных регуляторов на статистических объектах можно рассчитать по следующим формулам:
- для интегрального регулятора Sc = 1/(4.5коб*T);
- для пропорционального регулятора S1 = 0.3/(коб*t/Т);
- для пропорционально-интегрального регулятора S1 = 0.6/(коб*t/T); Тn = 0,6Т;
- для пропорционально-интегрального регулятора с производной S1 = 0.95/(коб*t/T); Тn = 2,4t; Тпр = 0,4t.