


Введение
В современной промышленности для экономии времени и ресурсов на производство конкретных изделий или составляющих используются станки с числовым программным управлением (УЧПУ) и робототехнические комплексы.
УЧПУ является сложным устройством требующим от обслуживающего персонала, в том числе и наладчика глубоких знаний в различных сферах.
Завершающим этапом по подготовке специалистов квалификации «техник-электроник» по специальности «Эксплуатация электронных систем и средств робототехники в автоматизированном производстве» является разработка дипломного проекта. На дипломное проектирование была выбрана тема: «Разработать мероприятия по наладке и эксплуатации вычислительного модуля (ВЧС) в составе УЧПУ «Электроника МС2101» с выполнением реальной части.»
Целями дипломного проектирования являются:
разработка мероприятий по наладке и эксплуатации вычислительного модуля (ВЧС) в составе УЧПУ «Электроника МС2101»;
выполнение реальной части дипломного проекта, изготовление универсального прибора диагностирования (осциллографа) и программного обеспечения к нему.
Для достижения поставленных целей необходимо выполнить следующие задачи:
изучить функции и области применения УЧПУ «Электроника МС2101»;
исследовать конструктивное исполнение УЧПУ
исследовать схемотехнику устройства ВЧС;
провести диагностику УЧПУ с помощью тестовых программ;
произвести диагностирование модуля ВЧС с помощью универсальных устройств;
разработать ремонтные операции УЧПУ «Электроника МС2101»
разработать блок-схему алгоритма диагностирования УЧПУ;
изучить нормы и правила охраны труда на предприятии;
изучить методы энерго- и ресурсосбережения;
рассчитать экономические затраты на наладку модуля ВЧС в составе УЧПУ «Электроника МС2101».
1 Характеристика исследуемого устройства
Главным элементом системы управления станком является устройство числового программного управления (УЧПУ).
Создание УЧПУ «Электроника МС2101.05-1» явилось результатом большой работы по реализации идей, заложенных при разработке микропроцессорной универсальной вычислительной системы (МУВС) и программного обеспечения к ней. МУВС допускает гибкую аппаратную комплектацию, каждый вариант которой без избыточности соответствует конкретным задачам, поставленным перед УЧПУ.
Комплектация обеспечена конструктивно и функционально законченными устройствами и состоит в объединении этих устройств в автономные агрегаты – блоки. Основной конструктив системы управления – блок содержащий обычно до четырех устройств – модулей, и встроенный блок питания.
Основная особенность МУВС – возможность блочного наращивания систем управления за счет модульного решения конструкции и программного обеспечения (ПО).
В состав отдельных МУВС входят:
вычислитель;
устройство связи с электроавтоматикой (ЭА), преобразователями обратной связи по положению, с приводами;
устройство пультов управления и оператора;
устройство клавиатуры и индикации;
устройство отображения информации на дисплее;
внешняя кассета памяти на 16К слов на цилиндрических магнитных доменах (ЦМД);
устройство сопряжения с внешней памятью;
расширитель памяти;
устройство программируемых временных задержек;
устройство программного управления ЭА и управления исполнительными органами ЭА.
Анализ дипломного проекта
На дипломный проект была выбрана тема: «Разработать мероприятия по наладке и эксплуатации вычислительного модуля (ВЧС) в составе устройства числового программного управления (УЧПУ) «Электроника МС2101» с выполнением реальной части».
Целями дипломного проектирования являются:
разработка мероприятий по наладке и эксплуатации вычислительного модуля (ВЧС) в составе УЧПУ «Электроника МС2101»
выполнение реальной части дипломного проекта изготовление осциллографа
Для достижения поставленных целей следует выполнить следующие задачи:
изучить техническую документацию по эксплуатации и наладке УЧПУ «Электроника МС2101»;
углубить знания по работе микроконтроллеров (МК);
углубить знания по программированию и прошивке МК;
изучить техническую литературу по работе микросхем.
Функции устройства мс 2101
Система УЧПУ Электроника МС 2101 предназначена для числового программного управления различным технологическим оборудованием в частности металлорежущими станками различной сложности. Она предназначена для автоматизации как единичного, так и массового производства, в связи со своей большой технологической гибкостью. Преимущество управляющей системы «Электроника МС 2101» заключается в том, что с помощью относительно дешевых компонентов, таких как однокристальная электронная вычислительная машина и запоминающее устройство, построили многофункциональную с блочно-модульной структурой систему, в которой каждая из микро ЭВМ решает определенную задачу.
Основные преимущества станков с ЧПУ:
высокая производительность;
гибкость и универсальность оборудования с точностью и производительностью станка автомата, что позволяет решать вопрос комплексной автоматизации единичного и серийного производства;
увеличение качества продукции машиностроения на базе современной электроники и вычислительной техники;
сниженная потребность в квалифицированных рабочих-станочниках, а подготовка производства переносится в сферу инженерного труда;
сокращение времени пригоночных работ в процессе сборки, так как детали, изготовленные по одной программе, являются взаимозаменяемыми;
сокращение сроков подготовки и перехода на изготовление новых деталей благодаря централизованной записи программ и более простой и универсальной технологической оснастке;
снижение продолжительности цикла изготовления деталей и уменьшение запаса незавершенного производства.
Числовое программное управление обеспечивает управление движениями рабочих органов станка и скоростью его перемещения при формообразовании, а также последовательностью цикла обработки, режимами резания, различными вспомогательными функциями.
Конструктивное исполнение устройства
Конструктивно устройство числового программного управления (УЧПУ) «Электроника МС 2101.05.1» состоит из двух микроЭВМ или блоков представленных на рисунке 1.
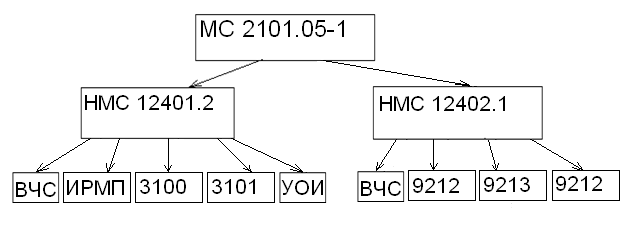
Рисунок 1 – Конструктивное исполнение УЧПУ «Электроника МС2101.05.1»
МикроЭВМ «Электроника НМС 12401.2-02» (дисплейный блок) предназначена для применения в составе УЧПУ и выполняет:
1) управление режимами работы УЧПУ с клавиатуры пульта микроЭВМ;
2) вывод на индикацию и в кассету внешней памяти (КВП) управляющей программы (УП);
3) ввод УП с клавиатуры микроЭВМ и с кассеты внешней памяти, входящей в состав микроЭВМ;
4) коррекцию УП с клавиатуры микроЭВМ;
5) индикацию текущих значений координат во время выполнения УП;
6) управление универсальными устройствами ввода-вывода;
7) связь по трем телеграфным дуплексным каналам с другими блоками УЧПУ и с ЭВМ высшего ранга.
МикроЭВМ «Электроника НМС 12401.1-09» (исполнительный блок) предназначена для применения УЧПУ станками и выполняет;
1) управление исполнительными механизмами дискретного типа, расположенными в станке, и прием сигналов от исполнительных механизмов станка;
2) управление механизмами точного перемещения в станке с выдачей управляющих воздействий и с приемом обратной связи о перемещениях (приводы осей перемещения станка);
3) прием от оборудования станка аналоговых и цифровых сигналов и преобразование их в цифровую форму;
4) обеспечение обмена информацией по последовательным телеграфным каналам (до трех каналов) с другими блоками УЧПУ и ЭВМ высшего ранга;
5) решение задач логики электроавтоматики (ЭА) управляемого оборудования по заданной программе (обработка УП).
Общий вид УЧПУ «Электроника МС2101» представлен на рисунке 2:
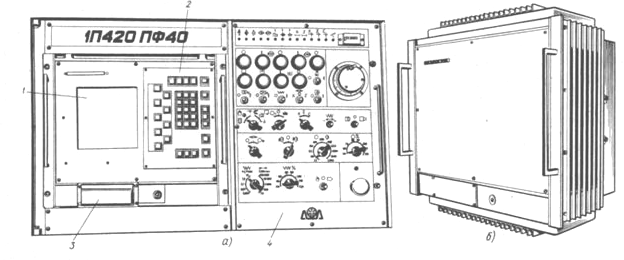
Рисунок 2 – Общий вид УЧПУ «Электроника МС2101»
а) первый (дисплейный) блок, встроенный в станок;
1)дисплей;
2) клавиатура УЧПУ;
3) кассета внешней памяти;
4) станочный пульт.
б) второй (исполнительный) блок.
УЧПУ Электроника МС2101 состоит из следующих модулей:
ВЧС – вычислитель является основной частью микроЭВМ, предназначенной для выполнения программ функционального, тестового и другого математического обеспечения.
Отображения (вывода) информации дисплея (УОИ).
Формирование прерываний, поступающих от различных устройств.
3100 – устройство предназначено для следующих целей:
Использования в качестве энергозависимой памяти в микроЭВМ.
Управления энергонезависимой кассетой памяти (3101).
3101 – устройство предназначено для использования в микроЭВМ в качестве съемной энергонезависимой кассеты памяти.
9212 – устройства предназначены для выдачи сигналов управления на ЭА управляемого оборудования и приема сигналов о состоянии устройств ЭА.
9213 – устройство предназначено для выдачи сигналов управления приводом и приема сигналов с фотоимпульсных датчиков положения.
Технические данные и характеристики устройства
Технические данные и характеристики представлены в таблице 1.
Показатель |
Значение |
||
Разрядность операндов, бит. |
16. Имеется возможность обработки байтовой информации. |
||
Представление чисел |
Целочисленное, в дополнительном коде, с фиксированной запятой, со знаком в старшем разряде. |
||
Формат команд |
Однословный, двухсловный (второе слово содержит данные или адрес) – а трехсловный (второе слово содержит данные, третье – адрес). |
||
Объем адресуемой памяти, Кбайт. |
64 |
||
Быстродействие выполнения основных команд |
Регистр-регистр, тыс. оп/с. |
не менее 380 |
|
Регистр-память, тыс. оп/с. |
не менее 180 |
||
Умножение, тыс.оп/с. |
не менее 12 |
||
Количество телеграфных дуплексных каналов |
3 |
||
Быстродействие обмена информацией, Кбод. |
2 канала |
до 19200 |
|
Продолжение таблицы 1
Быстродействие обмена информацией, Кбод. |
1 канал |
9600 |
||||||||||||||||||||||||||||||||||
Имеется возможность прерываний выполняемой программы с приоритетом в следующей последовательности |
1)Таймерное прерывание |
|||||||||||||||||||||||||||||||||||
2) Прерывание от одной из пяти программно выбираемых частот |
||||||||||||||||||||||||||||||||||||
3) Прерывание от телеграфных каналов по приему и передаче информации |
||||||||||||||||||||||||||||||||||||
4) Прерывание от внешних устройств |
||||||||||||||||||||||||||||||||||||
Имеется два типа интерфейса |
Интерфейс И1 функционально совместим с интерфейсом «общая шина» микроЭВМ «Электроника МС2101.05.1». |
|||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
Таблица 1 – Технические данные и характеристики УЧПУ Электроника МС2101
2 Исследование схемотехники устройства
Разработка структурной схемы
На структурной схеме микроЭВМ «Электроника НМС 12401.1-09» показаны взаимосвязи между входящими в микроЭВМ устройствами и основные связи подключения исполнительного электрооборудования станка.
Структурная схема содержит в своем составе следующие устройства: вычислитель (ВЧС), два устройства управления электроавтоматикой (9212-01), устройства управления приводами (9213), блок питания стабилизированный (БПС-44-3).
Устройство ВЧС является основной частью микро-ЭВМ и предназначено для организации вычислительного процесса и выполнения функционального, технологического и тестового программного обеспечения. Устройство осуществляет координацию взаимодействия составных частей микро-ЭВМ и организует непосредственную связь по последовательным ТЛГ-каналам обмена информацией с микро-ЭВМ, входящим в УЧПУ.
В устройство ВЧС входят четыре основных функциональных блока, объединенных внутренней магистралью:
1) Микропроцессор на микросхеме большой степени интеграции (БИС) К1801ВМ1Г, предназначенный для выполнения программ, размещенных в постоянной и оперативной памяти.
2) Оперативная память, выполненная на микросхеме К565РУ6 для временного хранения информации.
3) Постоянная память, выполненная на микросхеме К1801ВП1-065 предназначенная для хранения констант используемых микропроцессором (МП).
4) Блока телеграфных каналов выполненных на микросхеме К1801ВП1-065 предназначенных для передачи данных в ТЛГ каналы.
Структурная схема, разработанная на основании проведенного анализа работы блока, приведена в приложении А.
Разработка функциональной схемы
В состав устройства ВЧС входят следующие функциональные блоки.
Арифметико-логический блок (АЛБ) или процессор, выполненный на одной микросхеме К1801ВМ1Г. АЛБ предназначен для:
выборки команд в последовательности, определенной программой;
обмена информацией с оперативной и постоянной памятью;
выполнения операций с информацией, определенных в командах программы;
временного хранения информации на регистрах общего назначения, входящих в состав АЛБ.
Постоянное запоминающее устройство, предназначенное для хранения неизменяемой в процессе работы устройства информации. Под такой информацией понимаются, как правило, команды программ работы устройства. К постоянной памяти возможно обращение только по чтению информации.
Разделитель магистралей (ретранслятор) типа «общая шина» (ОШ) АЛБ, оперативной памяти и внешних устройств, предназначенный для умощнения сигналов магистрали «общая шина» с возможностью двунаправленной передачи информации.
Оперативное запоминающее устройство (ОЗУ), предназначенное для хранения информации, которая изменяется в процессе работы. К ОЗУ возможно обращение либо по чтению, либо по записи. Управление ОЗУ построено таким образом, что обеспеченна возможность аппаратного исправления ошибки, возникающей при хранении информации. Корректируется однократная ошибка в каждом из байтов информации.
Узел прерываний по частотам, предназначенный для обеспечения возможности прерывания выполняемой программы по одной из фиксированных частот. Частота прерывания выбирается программно.
Узел телеграфных каналов, представляющий собой совокупность аппаратных средств, реализующих обмен информацией по трем телеграфным каналам.
Узел синхронизации, предназначенный для формирования сигналов тактовой частоты, синхронизирующих работу всех узлов устройства. К узлу синхронизации принадлежит также таймер.
Функциональная схема приведена в приложении Б
Разработка принципиальной схемы
Микросхема К1801ВМ1 —однокристальный 16-разрядный микропроцессор (ОМП), предназначен для обработки цифровой информации в системах управления технологическими процессами, в контрольно-измерительной аппаратуре и системах связи, а также решения в составе ЭВМ инженерно-технических и экономических задач.
Условное графическое обозначение микросхемы приведено на рисунке 4
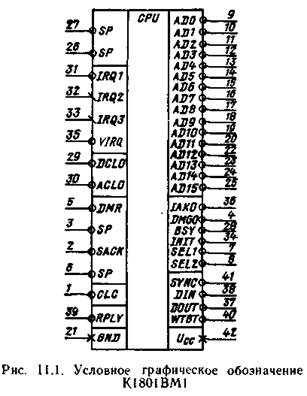
Рисунок 4 – Условно графическое обозначение микросхемы К1801ВМ1
В состав микросхемы входят следующие основные функциональные блоки, объединенные информационно-управляющими связями:
16-разрядный операционный блок, выполняющий операции формирования адресов команд и операндов, логические и арифметические, хранения операндов и результатов;
блок микропрограммного управления, вырабатывающий последовательность микрокоманд на основе кода принятой команды ‑ представляет собой микрокомандное ядро;
блок прерываний, организующий приоритетную систему прерываний ОМП. Выполняет прием и предварительную обработку внешних и внутренних запросов на прерывание вычислительного процесса;
интерфейсный блок, выполняющий обмены информацией между ОМП и устройствами расположенными на системной магистрали. Осуществляет арбитраж при операциях прямого доступа к памяти. В интерфейсном блоке формируется последовательность управляющих сигналов системной магистрали;
блок системной магистрали, связывающий внутреннюю магистраль ОМП с внешней. В нем производится управление усилителями приема и выдачи информации на совмещенные выводы адресов и данных;
схема тактирования, обеспечивающая синхронизацию внутренних блоков.
Сигналы ADO—AD15 определяют адреса и данные, которые передаются по совмещенной системной магистрали.
Группы сигналов SYNC, DIN, DOUT, WTBT, RPLY управляют передачей информации по системной магистрали Сигнал SYNC, вырабатываемый процессором, означает, что адрес находится на выводах системной магистрали. Этот сигнал сохраняет активный уровень до окончания текущего обмена информацией.
Сигнал RPLY означает, что данные приняты или установлены на информационных выводах Этот сигнал вырабатывается пассивным устройством в ответ на сигналы DIN и DOUT
Сигнал DIN предназначен для организации двух процедур обмена информацией по магистрали ввода данных — ОМП вырабатывает DIN во время действия сигнала SYNC, когда он готов принять данные от пассивного устройства, ввода адреса вектора прерывания-сигнал D1N вырабатывается совместно с сигналом 1АКО при пассивном уровне сигнала SYNC.
Сигнал DOUT означает, что данные, выдаваемые ОМП, установлены на выводах систем ной магистрали
Сигнал WTBT предназначен для организации двух процедур обмена информацией вырабатывается в адресной части цикла для указания о том, что далее следует вывод данных (слова или байта), формируется при выводе данных из ОМП для указания о выводе байта
Сигнал VIRQ вырабатывается внешним устройством для информирования ОМП о том, что оно готово передавать адрес вектора прерываний. В ответ на этот сигнал (если прерывание разрешено) ОМП вырабатывает сигналы DIN и IAKO
Сигнал IRQ1 определяет положение внешнего переключателя «Программа — пульт» Низкий уровень этого сигнала означает, что переключатель должен находиться в положении «Пульт» Этот сигнал переводит ОМП в состояние, аналогичное состоянию после вы полпения команды HALT
Сигналы IRQ2 и IRQ3 вызывают прерывание программы, выполняемой процессором, по фиксированным адресам 000100* и 000270 соответственно Прерывание происходит при переходе сигналов из высокого уровня в низкий.
Сигнал IAKO ОМП вырабатывается в ответ на внешний сигнал VIRQ. Этот сигнал является выходным для ОМП и входным для первого устройства, подключенного к системной магистрали (электрически ближе расположенного к ОМП и, следовательно, имеющего более высокий приоритет) Если это устройство не требовало прерываний (не устанавливало сигнал VIRQ), то оно транслирует сигнал IAKO к следующему устройству. Устройство, требующее прерывания ОМП, запрещает распространение этого сигнала Сигнал IAKO, последовательно проходя через все устройства, обеспечивает их поочередный опрос и различный приоритет обслуживания
Сигнал DMR вырабатывает внешнее активное устройство, требующее передачи ему системной магистрали
Сигнал DMGO процессор устанавливает в ответ на внешний сигнал DMR. Этот сигнал последовательно проходит через внешние устройства и предоставляет системную магистраль устройству с наивысшим приоритетом, запросившему прямой доступ к памяти. Это устройство прекращает трансляцию сигнала DMGO и устанавливает сигнал SACK, который вырабатывается устройством прямого доступа к памяти (ПДП) в ответ на сигнал ОМП DMGO. Сигнал SACK означает, что устройство ПДП может производить обмен данными, используя стандартные циклы обращения к системной магистрали.
Сигнал BSY предназначен для управления устройствами умощнения магистрали. Низкий уровень этого сигнала означает, что ОМП начинает обмен по магистрали Переход сигнала из низкого уровня в высокий означает окончание обмена.
Сигнал аварии источника питания DCLO вызывает установку ОМП в исходное состояние и появление сигнала IN1TСигнал аварии сетевого питания ACLO означает переход ОМП на обработку прерывания по сбою питания. Высокий уровень этого сигнала означает, что сетевое напряжение питания в норме. При появлении одного из сигналов обращения к внешним регистрам расширения ввода/вывода SELI, SEL2 адрес на выводах системной магистрали соответствует адресу одного из внешних регистров расширения ввода/вывода. Сигнал SEL1 устанавливается при обращении по фиксированному адресу 177716, сигнал SEL2— по адресу 177714.
Совместно с сигналами DIN или DOUT происходит соответственно ввод данных в ОМП из регистров или вывод из ОМП на регистры. Установка сигнала RPLY от регистров расширения ввода/вывода не требуется. По длительности сигналы SEL1 и SEL2 совпадают с сигналом BSY. После включения напряжения питания ОМП устанавливает сигнал INIT и ожидает снятия сигнала DCLO. После снятия сигнала DCLO происходят ввод информации из регистра расширения ввода/вывода по адресу 177716 и формирование значений счетчика команд (СК). В разряды 0—7 СК загружается нулевая информация, в разряды 8—15 — информация из соответствующих разрядов регистра ввода/вывода, обращение к которому происходит по сигналу SELL
Регистр состояния процессора загружается константой 340. Микросхема анализирует состояние запросов на прерывания. Если незамаскированных запросов нет, то происходят ввод первой команды и ее выполнение.
Сигнал INIT является ответом ОМП на сигнал DCLO. Его используют для установки периферийной части системы в исходное состояние. При вводе этого сигнала в ОМП происходит сброс триггеров запроса радиальных прерываний и блокирования сигнала DMR.
Системная магистраль позволяет адресовать 64К байта. Верхние 8К байт адресного пространства резервируются для управления периферийными устройствами и регистрами данных. Системная магистраль ОМП позволяет организовать канал обмена информацией, аналогичный каналу ЭВМ «Электроника-60», в котором связь между двумя устройствами осуществляется по принципу «активный — пассивный».
Активное устройство управляет прохождением информации по системной магистрали, разрешает прерывания, обеспечивает предоставление прямого доступа к памяти. Пассивное устройство передает информацию только под управлением активного устройства.
При обращении ОМП к памяти или внешним устройствам возможны следующие виды обменов (циклов) информацией по системной магистрали: «Ввод» (чтение), «Вывод» (запись), «Ввод — пауза — вывод» (Чтение — модификация — запись).
Цикл «Ввод — пауза — вывод» включает ввод данных, выполнение арифметико-логических операций и вывод результата без повторения передачи адреса, т. е. результат записывается по адресу последнего выбранного операнда.
Порядок выполнения операций следующий: процессор на выводах системной магистрали устанавливает адрес и выдает сигнал BSY; синхронно с выдачей и снятием адреса ОМП устанавливает и снимает сигнал синхронизации SYNC, по которому происходит запоминание адреса пассивным устройством; после установки сигнала SYNCОМП снимает адрес, устанавливает сигнал DIN и ожидает поступление сигнала RPLY от пассивного устройства. Если в течение 64 тактов частоты синхронизации сигнал не появился, то ОМП переходит к обслуживанию внутреннего прерывания по ошибке обращения к системной магистрали; после приема сигнала RPLYОМП принимает данные от пассивного устройства и снимает сигнал DIN; после снятия сигнала DIN пассивное устройство снимает сигнал RPLY, завершая операцию передачи данных; после снятия сигнала RPLY пассивным устройством ОМП снимает сигналы SYNC и BSY. Если системная магистраль не предоставляется устройству ПДП, то ОМП сразу после снятия сигнала SYNC может начать новый цикл обращения к магистрали. В этом случае сигнал BSY не снимается.
Во время цикла «Ввод» сигнал WTBT не вырабатывается.
Кроме ОМП активным устройством на системной магистрали может быть устройство ПДП. В режиме ПДП обмен информацией происходит без вмешательства ОМП под управлением устройства ПДП. Последнее выполняет адресацию, синхронизацию, вырабатывает управляющие сигналы для организации стандартных циклов обращения к системной магистрали.
Устройство ПДП устанавливает сигнал DMR, в ответ на который ОМП формирует сигнал DMGO, затем, получив сигнал DMGO, вырабатывает сигнал SACK и снимает сигнал DMR. Микросхема снимает сигнал DMGO и ожидает завершение операции ПДП. Устройство ПДП начинает выполнять циклы передачи данных, аналогичные циклам «Ввод», «Вывод» или «Ввод — пауза — вывод». После окончания обмена данными устройство ПДП снимает сигнал SACK, возвращая управление магистралью процессору. Регистры общего назначения (РОН) используются в качестве индексных и накопительных регистров автоинкрементной и автодекрементной адресаций. Среди восьми РОН два регистра (R6 и R7) имеют специальное назначение. Регистр R6 используется в качестве указателя стека (УС) и содержит адрес последней ячейки стека, R7 является счетчиком команд (СК) и содержит адрес очередной выполняемой команды.
Кроме РОН программно доступным регистром является регистр состояния процессора (РСП), содержащий информацию о текущем приоритете ОМП, значения кодов условий ветвлений программы, состояние Т-бита, используемого при отладке программы и вызывающего прерывание программы. Если 7-й разряд РСП находится в состоянии 1, то внешние устройства не могут вызвать прерывание текущей программы, в противном случае внешние устройства вызывают прерывание.
Установка отдельных разрядов кодов ветвления выполняется в следующих случаях:
Z=l, если результат равен 0;
N=lt если результат отрицателен;
С=\, если в результате выполнения операции произошел перенос из самого старшего разряда или если при операциях сдвига вправо или влево из самого младшего или самого старшего разряда была выдвинута 1;
V=l, если в результате выполнения операции произошло арифметическое переполнение.
При загрузке информации в РСП может быть установлен или очищен Т-разряд. Если он установлен, то после завершения выполнения текущей команды будет вызвано прерывание программы с адресом вектора прерывания 14. Используют Т-разряд в отладочных программах для организации такого режима выполнения отлаживаемой программы, при котором исполнение интересующих пользователя команд вызывает прерывание программы и переход на программу связи с оператором. Для работы совместно с системным ПЗУ в РСП введены два дополнительных разряда (10 и 11), обеспечивающих изменение режима реакции на прерывания.
Безадресные команды содержат только код операции.
Разряды 15—6 содержат код операции, определяющий исполняемую команду. Разряды 5—0 образуют 6-разрядное поле адресации операнда приемника, которое, в свою очередь содержит необходимый адрес данных.
Формат одноадресных команд имеет вид, состоящий из двух полей: разряды 2—0 определяют один из восьми РОН, который использует данные команды; разряды 5—3 определяют метод адресации. Разряд 3 определяет прямую или косвенную адресацию.
Поле адресации операнда источника используется для выборки операнда источника, поле адресации операнда приемника — для выборки операнда источника и занесения результата. Источниками прерываний, расположенными в соответствии с приоритетностью обработки (при одновременном появлении нескольких запросов), являются:
ошибка обращения к магистрали;
резервный или запрещенный код в регистре команд;
Т-бит в РСП;
сигнал аварии сетевого питания ACLO;
сигналы радиальных прерываний IRQ1, IRQ2, IRQ3;
сигнал векторного прерывания VIRQ.
Установка 7-го разряда РСП в 1 позволяет игнорировать сигналы прерывания VIRQ, IRQ2, 1RQ3.
Прерывание текущего процесса и последующая его обработка производятся после выполнения очередной команды. Прерывание по ошибке обращения к системной магистрали (обращение по адресу несуществующей ячейки Памяти или регистра внешнего устройства) может прервать выполнение программы на любой фазе исполнения команды.
Последовательность операций при этом следующая. Устройство, которому необходимо обслуживание, выставляет сигнал требования прерывания VIRQ. Если прерывание разрешено, то ОМП помещает в стек содержимое СК и РСП и последовательно устанавливает сигналы DIM и IAKO. Устройство принимает сигнал IAKO и запрещает его распространение к другим устройствам, помещает адрес вектора прерывания на выводы системной магистрали, вырабатывает сигнал RPLY и снимает сигнал VIRQ.
Процессор принимает адрес вектора прерывания и последовательно снимает сигналы DIN и IAKO. Устройство завершает передачу вектора и снимает сигнал RPLY.
Микросхема ОМП загружает новое содержимое СК и РСП из двух последовательных ячеек, первая из которых определяется адресом вектора прерывания, после чего переходит к выполнению программы обслуживания данного устройства.
Принципиальная схема вычислительного модуля представлена в приложении В
3.Диагностирование устройства
3.1 Тестовое диагностирование
Работоспособность систем числового программного управления (ЧПУ) проверяют, как правило, по тест-программам не реже одного раза в неделю. Такую же проверку проводят и в случае неправильной обработки детали на станке, выясняя, в чем причина — в неправильно составленной программе или в неисправности системы ЧПУ. Проверка по тест-программам может быть различной в зависимости от возможностей каждой конкретной системы ЧПУ. Наиболее часто тест-программа представляет собой обычную управляющую программу (УП), в которой предусмотрены все используемые в системе ЧПУ режимы работы. Проверяя системы ЧПУ на станке, наладчик наблюдает отработку станком тест-программы (в том числе работу приводов подач и выполнение последовательности технологических команд). Как обычные УП, так и тест-программы строятся таким образом, чтобы рабочий орган станка в конце программы вернулся в исходную точку. Выполнение станком технологических команд (частота вращения шпинделя, смена инструмента), предусмотренных тест-программой, проверяют, как правило, визуально. Наблюдают также состояние различных органов индикации (например, номер и код технологический команды), предусмотренных системой ЧПУ. Аналогично производят проверку систем ЧПУ по тест-программам на стенде с использованием графопостроителя вместо станка. При проверке работоспособности системы ЧПУ без станка (и без стенда) наладчик пользуется только органами индикации, предусмотренными в системе. В микропроцессорных устройствах числового программного управления (УЧПУ) результаты проверки по тест-программам высвечиваются на дисплее. Указывается код обнаруженной погрешности. По перечню значений кодов наладчик определяет причину отказа. В ряде систем вместо кода высвечивается текстовое наименование отказа.
Надежность УЧПУ в значительной мере зависит от системы диагностирования, а также от системы контроля и исправления ошибок в памяти. Входной контроль УЧПУ выполняется с помощью специального теста проверки исправности функционирования системы. Этот тест, реализуемый программно-аппаратными средствами завода-изготовителя УЧПУ, предусматривает временную установку платы контроля. Помимо входного контроля в процессе работы УЧПУ предусматривается выполнение тестов самодиагностирования двух видов: до начала рабочих режимов (резидентный тест); во время функционирования в фоновом режиме.
Резидентный проверяющий тест автоматически выполняет подробную диагностику узлов непосредственно после включения УЧПУ. Особенностью резидентного теста является полная его автономность по отношению к контролируемым функциональным узлам устройства ЧПУ, что позволяет обеспечить детальную проверку всех узлов устройства ЧПУ на функционирование.
Обнаруженные неисправности в функционировании узла индикатируются на экране дисплея пульта управления в виде кодов ошибок или в расшифрованном тестовом виде. По окончании полного диагностического контроля устройства ЧПУ с помощью резидентного теста оператор получает возможность выбрать соответствующий режим работы. Диагностический контроль в рабочих режимах выполняется во время, свободное от выполнения основных операций. При этом устройство ЧПУ автоматически переводится в фоновый режим выполнения диагностических тестов. В процессе проведения каждого теста последовательно решается ряд элементарных арифметико-логических задач. Полученные в процессе выполнения теста результаты сравниваются с константами, представляющими полученные ранее ответы и хранящиеся в памяти устройства ЧПУ.
Несовпадение результатов выполнения тестов с соответствующими константами рассматривается диагностической системой как ошибка функционирования (сбой, отказ) узла устройства ЧПУ. При этом на экран дисплея в зону комментариев выводится информация о коде ошибки, которая позволяет локализовать неисправный узел или место в устройстве ЧПУ.
Обнаружение и исправление ошибок в памяти выполняется с помощью специального метода кодирования. Наиболее распространенным является код Хэмминга, позволяющий исправить однобитовые и обнаруживать двухбитовые ошибки в слове. Существуют также более развитые схемы, позволяющие исправлять двухбитовые ошибки. Контроль этих ошибок может реализоваться схемными или программными методами, а также смешанным аппаратно-программным методом. Однако все коды построены по одному общему принципу: исходя из определенных сочетаний битов контролируемых данных, формируются дополнительные биты, называемые контрольными или битами четности. Зная положение этих битов в закодированном слове данных и их значения (1 или 0), можно обнаружить определенное число ошибок. Автоматическое исправление некоторых из этих ошибок сводится к замене 1 на 0 или наоборот. Обычно число автоматически исправляемых ошибок в слове меньше числа ошибок, которое можно обнаружить.
3.2 Диагностирование с помощью специальных приборов
Данный вид диагностирования возможно произвести с помощью специального прибора – блока инициирования.
Инициирование процессора (ПРЦ).
Для инициирования БИС процессора 1801ВМ1Г требуется после подачи питания плюс 5В сформировать определенную последовательность сигналов: авария источника питания (DCL 0) и авария сетевого питания (ACL 0). В этой последовательности выделяются три фазы.
1) Первая фаза Наличие сигналов DCL 0 и ACL 0 низкого уровня одновременно в течение не менее пяти тактов тактирующей частоты CLCI (вход 16). В это же время вырабатывается сигнал INIT (выход 27) низкого уровня сигнала сброса внешних устройств. Заканчивается первая фаза инициирования снятием сигнала DCL 0 и сигнала INIT.
2) Вторая фаза ожидание снятия сигнала ACL 0, длительность второй фазы не менее 10 тактов частоты CLCI.
3) третья фаза работа микропрограммы инициализации. После снятия сигнала ACL 0 процессор выполняет следующую последовательность команд.
а) Считывает данные с внешнего регистра по процедуре безадресного чтения. Процедура безадресного чтения ‑ это специальная операция процессора, состоящая в том, что процессор выставляет одновременно сигналы SEL и DIN в течении четырех тактов синхронизирующей частоты CLCT. В процессоре МС2101 по безадресному чтению считывается адрес 14000Х, где три последних разряда изменяются в зависимости от установки переключателей SA1.1, SA1.2,SA1.3 определяющих режим пуска процессора.
б) Формируется адрес вектора начального пуска процессора следующим образом. Старший байт считанного адреса остается, а младший приравнивается к нулю. В результате вектор начального пуска 140000.
в) Счетчик команд (СК) загружается значением системного ПЗУ по адресу 140000 + 2. В процессоре МС2101 в СК загружается 140300 в РСП 740.
г) Анализирует состояние источников прерывания, если возникла ситуация разрешения прерывания, то процессор переходит на выполнение команд на разрешение прерывания.
д) Если прерываний нет, то процессор переходит к загрузке кодов команд и их выполнение.
Диаграмма сигналов при включении питания и работе микропрограммы инициализации представлена на рисунке 5
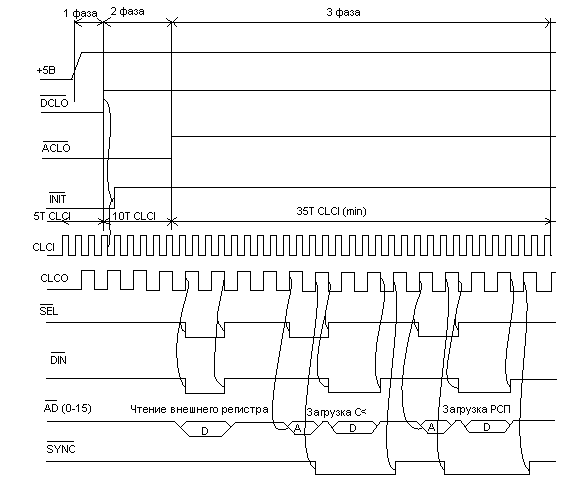
Рисунок 5 – Диаграмма сигналов при включении питания и работе микропрограммы инициализации
Предварительная проверка процессора (ПРЦ) МС 2101 при помощи блока инициирования.
Предварительную проверку ПРЦ МС 2101 можно произвести при помощи устройства, вырабатывающего сигналы ACL 0 и DSL 0 с некоторой частотой, что позволяет просмотреть старт процессора осциллографом и при отклонениях от эталона выявить неисправный узел. Устройство представляет собой два делителя частоты, один из которых вырабатывает сигналы ACL 0 и DSL 0 (КПИТН, КПОСТН), а второй делитель сигнал синхронизации осциллографа. Сигнал синхронизации осциллографа СИНХР может сдвигаться по фазе относительно сигналов КПИТН и КПОСТН при помощи переключателей, что позволяет, укрупнено рассмотреть различные участки стартовой последовательности. Кроме того переключателями можно установить синхронизацию от сигнала КСИАН, что позволяет исследовать сигналы процессора через какое-то определенное количество циклов обмена.