

Понятие о инженерном проектировании.
Инженерное проектирование - это процесс, в котором научная и техническая информация используется для создания новой системы, устройства или машины, приносящих обществу определенную пользу [ 7 ].
Проектирование (по ГОСТ 22487-77) - это процесс составления описания, необходимого для создания еще несуществующего объекта (алгоритма его функционирования или алгоритма процесса), путем преобразования первичного описания, оптимизации заданных характеристик объекта (или алгоритма его функционирования), устранения некорректности первичного описания и последовательного представления (при необходимости) описаний на различных языках.
Проект (от латинского projectus - брошенный вперед) - совокупность документов и описаний на различных языках (графическом - чертежи, схемы, диаграммы и графики; математическом - формулы и расчеты; инженерных терминов и понятий - тексты описаний, пояснительные записки), необходимая для создания какого-либо сооружения или изделия.
Методы проектирования.
Прямые аналитические методы синтеза (разработаны для ряда простых типовых механизмов);
Эвристические методы проектирования - решение задач проектирования на уровне изобретений (например, алгоритм решения изобретательских задач [8]);
Синтез методами анализа - перебор возможных решений по определенной стратегии (на пример, с помощью генератора случайных чисел – метод Монте-Карло) с проведением сравнительного анализа по совокупности качественных и эксплуатационных показателей (часто используются методы оптимизации - минимизация сформулированной разработчиком целевой функции, определяющей совокупность качественных характеристик изделия);
Системы автоматизированного проектирования или САПР - компьютерная программная среда моделирует объект проектирования и определяет его качественные показатели, после принятия решения - выбора проектировщиком параметров объекта, система в автоматизированном режиме выдает проектную документацию.
Другие методы проектирования [9, 10, 11].
Основные этапы процесса проектирования.
1. |
Осознание общественной потребности в разрабатываемом изделии |
2. |
Техническое задание на проектирование (первичное описание) |
3. |
Анализ существующих технических решений |
4. |
Разработка функциональной схемы |
5. |
Разработка структурной схемы |
6. |
Метрический синтез механизма (синтез кинематической схемы) |
7. |
Статический силовой расчет |
8. |
Эскизный проект |
9. |
Кинетостатический силовой расчет |
10. |
Силовой расчет с учетом трения |
11. |
Расчет и конструирование деталей и кинематических пар (прочностные расчеты, уравновешивание, балансировка, виброзащита) |
12. |
Технический проект |
13. |
Рабочий проект (разработка рабочих чертежей деталей, технологии изготовления и сборки) |
14. |
Изготовление опытных образцов |
15. |
Испытания опытных образцов |
16. |
Технологическая подготовка серийного производства |
17. |
Серийное производство изделия |
Понятие о технической системе и ее элементах. (из теории технических систем по[11])
Техническая система - ограниченная область реальной действительности, взаимодействующая с окружающей средой U, выполняющая определенные функции F и имеющая структуру S.
|
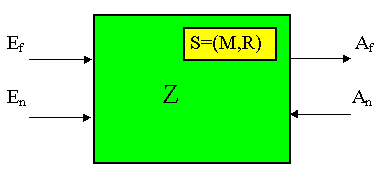
Ef, Af - параметры, характеризующие функции F системы; En An - параметры, не относящиеся к функциям прибора (условия работы, внешние и дополнительные воздействия); Z - системный оператор; M - элементы системы; R - отношения между элементами системы.
Окружающая среда U - совокупность внешних объектов, взаимодействующих с системой.
Функция F - свойство системы, используемое для преобразования входных величин Ef, при внешних и дополнительных воздействиях An и условиях работы En, в выходные величины Af. Функция является объективно измеряемое свойство, которое может быть охарактеризовано параметрами системы. Количество реализуемых системой функций соответствует количеству используемых системой физических свойств. Если система выполняет несколько функций, то различают общую и частные функции. Общая функция охватывает множество всех входных и выходных величин, которое характеризует рассматриваемую систему как одно целое. Частные функции делятся на: главные и вспомогательные - по их значению в выполнении задачи; основные и элементарные - по типу изменения изменений функций в процессе их выполнения.
Структура S - совокупность элементов М и отношений R между ними внутри системы S=(M,R). Элемент системы при проектировании рассматривается, как одно целое, хотя он может иметь различную степень сложности. Если при рассмотрении элемента, не принимается во внимание его форма и внутреннее строение, а рассматривается только выполняемая им функция, то такой элемент называется функциональным. Для механической системы элементами могут быть: деталь, звено, группа, узел, простой или типовой механизм. Деталь - элемент конструкции не имеющий в своем составе внутренних связей (состоящий из одного твердого тела). Звено - твердое тело или система жестко связанных твердых тел (может состоять из одной или нескольких деталей) входящая в состав механизма. Группа - кинематическая цепь, состоящая из подвижных звеньев, связанных между собой кинематическими парами (отношениями), и удовлетворяющая некоторым заданным условиям. Узел - несколько деталей связанных между собой функционально, конструктивно или каким-либо другим образом. С точки зрения системы узлы, группы, простые или типовые механизмы рассматриваются как подсистемы. Самым низким уровнем разбиения системы при конструировании является уровень деталей ; при проектировании - уровень звеньев. Элементы из системы можно выделить только после определения взаимосвязей между ними, которые описываются отношениями. Для механических систем интерес представляют отношения определяющие структуру системы и ее функции, т.е. расположения и связи. Расположения - такие отношения между элементами, которые описывают их геометрические относительные положения. Связи - отношения между элементами, предназначенные для передачи материала, энергии или информации между элементами. Связи могут осуществляться с помощью различных физических средств: механических соединений, жидкостей, электромагнитных или других полей, упругих элементов. Механические соединения могут быть подвижными(кинематические пары) и неподвижными. Неподвижные соединения делятся на разъемные (винтовые, штифтовые) и неразъемные (сварные, клеевые).