

6.2. Регуляторы скорости перемещения
редукторы;
управление напряжением питания для двигателей постоянного тока;
управление частотой управляющих импульсов для шаговых двигателей
6.3. Тормозные устройства
механические: фрикционные муфты и амортизационные безынерционные пружины;
Исполнительные механизмы суз конкретных реакторов
Реакторы ВВЭР-440:
Рабочий орган (АРК) – ТВС с расположенным выше поглотителем из бористой стали;
верхнее положение ИМ;
«мокрое» исполнение – привод работает в среде 1-го контура;
мощный электродвигатель (кассета АРК - более 300 кг) переменного тока с автономным охлаждением (температура не более 100 градусов);
реечное исполнение (либо с подвижной шестерней либо с жестко закрепленной);
кинематическая схема (РО, тяга с охлаждением, электродвигатель с охлаждением, редуктор с подвижной шестерней, узел отключения, узел индикации);
индикация положения;
байонетное соединение тяги;
гидравлический тормоз;
две модификации ИМ (с подвижной реечной шестерней и неподвижной).
На реакторах ВВЭР-440 применяются ИМ двух модификаций. Кинематическая схема ИМ первой модификации показана на рис. 6.6. ИМ состоит из герметичного электродвигателя синхронно-реактивного типа погружного исполнения с автономным охлаждением, что обеспечивает его работу и среде первого контура реактора при температуре обмотки не более 100°С. Общий вид редуктора электродвигателя приведен на рис. 6.7,а, конструкция электродвигателя показана на рис. 6.8. От ведущей шестерни электродвигателя вращение передается на редуктор. Особенность данной модификации привода заключается в том, что реечная шестерня закреплена не подвижно, а прижимается к рейке усилием электромагнита. Такое решение позволяет обеспечить быстрый разгон (~ 0,5 с) падающей рейки и связанной с ней кассеты АРК до требуемой скорости (200—300 мм/с) по сигналу A3, а также предохранить редуктор от поломок в случае несрабатывания конечных выключателей. Конструкция узла отключателя показана на рис. 6.9. Рейка с промежуточной штангой соединяется посредством байонетного затвора, конструкция которого показана на рис. 6.10. Управление байонетом вынесено на верхний конец рейки, где установлен также сердечник датчика положения. Центровка рейки обеспечивается специальными направляющими роликами, установленными в корпусе редуктора (рис. 6.11).
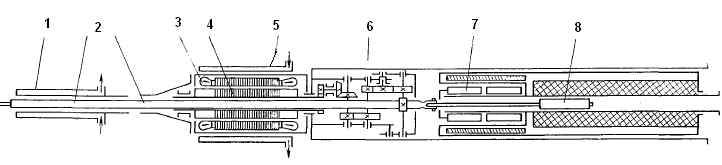
Рис. 6.6. Схема механизма управления ВВЭР-440:
1 — охладитель; 2— рейка; 3 — статор электродвигателя; 4 — ротор электродвигателя; 5 — охладитель; 6 — редуктор; 7 — узел отключателя; 8 — индуктивный датчик положения
Реакторы ВВЭР-1000:
рабочий орган – кластер;
верхнее исполнение ИМ;
линейный шаговый двигатель;
Шаговый электромагнитный привод СУЗ
Шаговый электромагнитный привод СУЗ предназначен для обеспечения
дискретного (шагового) возвратно-поступательного перемещения органа
регулирования в активной зоне реактора с целью автоматического поддержания
заданного уровня мощности реактора, перевода реактора с одного уровня
мощности на другой, компенсации изменения реактивности и для обеспечения
быстрого прекращения ядерной реакции путем быстрого ввода в активную зону
поглощающих стержней.
Основными узлами привода являются блок электромагнитов, чехол, блок
перемещения, штанга, преобразователь перемещения и датчик положения. Узлы
привода, расположенные внутри чехла, работают в воде первого контура
реактора: узлы, расположенные снаружи – в воздушной среде.
Требуемый режим работы привода обеспечивается подачей в определенной
последовательности импульсов тока на катушки тянущего, запирающего и
фиксирующего электромагнитов.
Полюса электромагнитов, соединенные с защелками и другими элементами
блока перемещения, передвигаются под действием электромагнитного поля и
обеспечивают необходимые перемещения штанги или ее фиксирование в заданном
положении.
Для быстрого прекращения ядерной реакции (в режиме аварийной защиты)
все три электромагнита обесточиваются, защелки открываются и штанга с
органом регулирования имеет возможность свободного падения.
Преобразователь перемещения служит для преобразования линейного
перемещения штанги во вращательное движение элементов датчика положения,
обеспечивающего индикацию положения штанги. Сцепление штанги с органом
регулирования осуществляется с помощью байонетного соединения.
Техническая характеристика
|Скорость перемещения |20 |
|регулирующего органа в | |
|режиме регулирования, мм/с | |
|Время аварийного сброса |1,5-4|
|штанги с регулирующим | |
|органом с полной высоты | |
|рабочего хода, с | |
|Рабочий ход, мм |3500 |
|Масса привода, кг |550 |
PWR – подобно ВВЭР – 1000; линейный шаговый двигатель с магнитной защелкой.
BWR:
Особенности физики, влияющие на систему регулирования реактивности: деформация профиля нейтронного потока по высоте, большой запас реактивности (паровой эффект) – необходима большая эффективность КО, ограничение возможности использования борной кислоты, больший объем активной зоны, сепарация пара в верхней части корпуса реактора, следовательно нижнее расположение приводов РО,
Однако для успешного проектирования надежных и высокоэффективных механизмов и органов СУЗ для кипящих реакторов необходимо иметь в виду следующие специфические особенности установок этого типа.
1. Для кипящих реакторов характерна неоднородность структуры активной зоны по высоте. При восходящем потоке теплоносителя в нижней части активной зоны имеется небольшой экономайзерный участок без кипения, выше которого начинается образование пузырьков пара. В верхней части активной зоны теплоноситель имеет ярко выраженную двухфазную структуру: паросодержание на выходе достигает 10—15% (по массе). Соответственно этому изменяются по высоте замедляющие свойства теплоносителя, а значит, и энергораспределение: его максимум смещается от центра вниз. При этом ввод поглотителя сверху будет еще более деформировать поле энерговыделения, а дифференциальная эффективность такого органа регулирования в начале хода может оказаться недостаточной.
2. В связи с меньшей энергонапряженностью габаритные размеры кипящего реактора при той же мощности получаются больше, чем у реактора с водой под давлением. Поэтому количество регулирующих стержней в кипящих реакторах больше, чем в некипящих корпусных реакторах.
Значительно большее количество органов регулирования на современных кипящих реакторах объясняется не только усложнением задач пространственного регулирования энерговыделения в большой зоне, но и трудностью применения здесь жидких поглотителей, так что вся избыточная реактивность компенсируется только стержнями.
3. В современных больших кипящих реакторах BWR сепарация пара происходит, как правило, в корпусе реактора. Пространство над активной зоной используется для гравитационного отделения капель воды, установки центробежных и жалюзийных сепараторов, организации тяговых участков (в установках с естественной циркуляцией) .
С учетом изложенных соображений в реакторах BWR считается целесообразным ввод стержней-поглотителей в активную зону снизу со стороны экономайзерного («холодного») участка. ИМ при этом также целесообразно располагать снизу, под реактором. Такое решение облегчает -перегрузку зоны, приводит к улучшению профиля энерговыделения по высоте реактора, обеспечивает достаточно высокую и стабильную эффективность органов регулирования (что особо важно для аварийной защиты), создает определенные удобства компоновки внутрикорпусных устройств и, наконец, дает возможность вести перегрузку при работающей системе A3.
В пользу «нижнего» расположения ИМ на кипящих реакторах говорит и необходимость надежного охлаждения и смазки деталей механизма.
Как уже отмечалось, нижнее расположение органов и механизмов управления имеет недостатки:
- усложнение конструкции корпуса реактора и здания АЭС в связи с созданием под реактором помещения СУЗ;
- опасность скопления радиоактивного шлака в патрубках и ИМ;
- необходимость мощного и быстродействующего привода СУЗ для осуществления быстрого ввода в активную зону стержней A3 против силы тяжести; при известных ограничениях на размеры наиболее подходящим для такой цели является линейный гидравлический привод (гидроцилиндр).
Нижнее расположение механизмов системы управления принято на всех больших кипящих реакторах фирмы «Дженерал электрик» (США), которая является в настоящее время основным производителем ядерных энергетических установок подобного типа.
Универсальный гидропривод. Для перемещения стержней-поглотителей в режимах компенсации, ручного и автоматического регулирования, а также медленной и быстрой A3 фирмой «Дженерал электрик» (США) разработан компактный универсальный ИМ с гидравлическим приводом. Такие механизмы устанавливаются на патрубках, вваренных в днище реактора, стержни же загружаются в зону сверху и сцепляются со штангами механизмов байонетными замками (поворот на 90°). Для выхода регулирующих органов в пространстве под активной зоной имеются направляющие трубы.
Преимущество нижнего расположения,
Недостатки нижнего расположения,
Выбор гидропривода для ИМ;
РО – крестообразной формы;
Схема работы (сделать прозрачку).
Фиксация,
Контроль положения индуктивными датчиками
РБМК:
Верхнее исполнение РО РР-АЗ,
Тросовое соединение,
Двигатель постоянного тока (48 В), электромагнитная муфта, сброс под действием силы тяжести,
Укороченные стержни и стержни АР – ввод снизу,
Преимущества и недостатки тросового соединения.
АМБ:
Нижнее расположение всех приводов,
АР – привод рейка-шестерня
РР – винт-гайка,
АЗ – гидропривод (схема).
Не универсализм