

2.Якорно-швартовые приспособления.
Для обслуживания якорного устройства применяют подъемные механизмы, имеющие горизонтальную или вертикальную ось барабана для выбирания якорной цепи. Первые называются брашпилями, а вторые - шпилями. На судах транспортного флота применяют преимущественно брашпили. Шпили используют обычно при швартовке или для подъема кормового якоря на некоторых судах. В последнее время шпили как якорные механизмы применяют на крупнотоннажных судах с бульбообразными носовыми образованиями, где нельзя использовать брашпиль из-за искривлении линии якорных цепей при значительном расстоянии клюзов от диаметральной плоскости судна и его форштевня. Шпили применяют также на промысловых и ледокольно-транспортных судах, работающих в условиях обледенения.
В настоящее время наиболее распространены брашпили с электрическим приводом. До недавнего времени на нефтеналивных судах по соображениям пожарной безопасности устанавливали также брашпили с приводом от поршневых паровых машин простейшего типа. Применение взрывобезопасного электрооборудования позволило отказаться от парового привода брашпилей и других палубных механизмов на нефтеналивных судах. Кроме того, в настоящее время все шире применяют гидравлический привод палубных механизмов, в том числе брашпилей.
Мощность двигателя брашпиля должна обеспечить, как требуют Правила Регистра, подъем якоря со скоростью не менее 10. м/мин. Брашпиль должен иметь возможность работать непрерывно не менее 30 мин. Наибольшее тяговое усилие брашпиля рассчитано примерно на семикратный вес якоря (усилие для отрыва, якоря от грунта). Во всех конструкциях брашпилей предусматривается возможность подъема якоря вручную со скоростью 2,5 м/мин. Современные брашпили надежны и безопасны в действии, способны удерживать якорь на весу, обеспечивают плавное регулирование частоты вращения вала двигателя, имеют наибольшие массу и размеры. Брашпиль любого типа служит для выполнения следующих операций: отдачи правого и левого якорей как при помощи машины, так и без нее; подъема якорей в отдельности или одновременно выбирания швартовов.
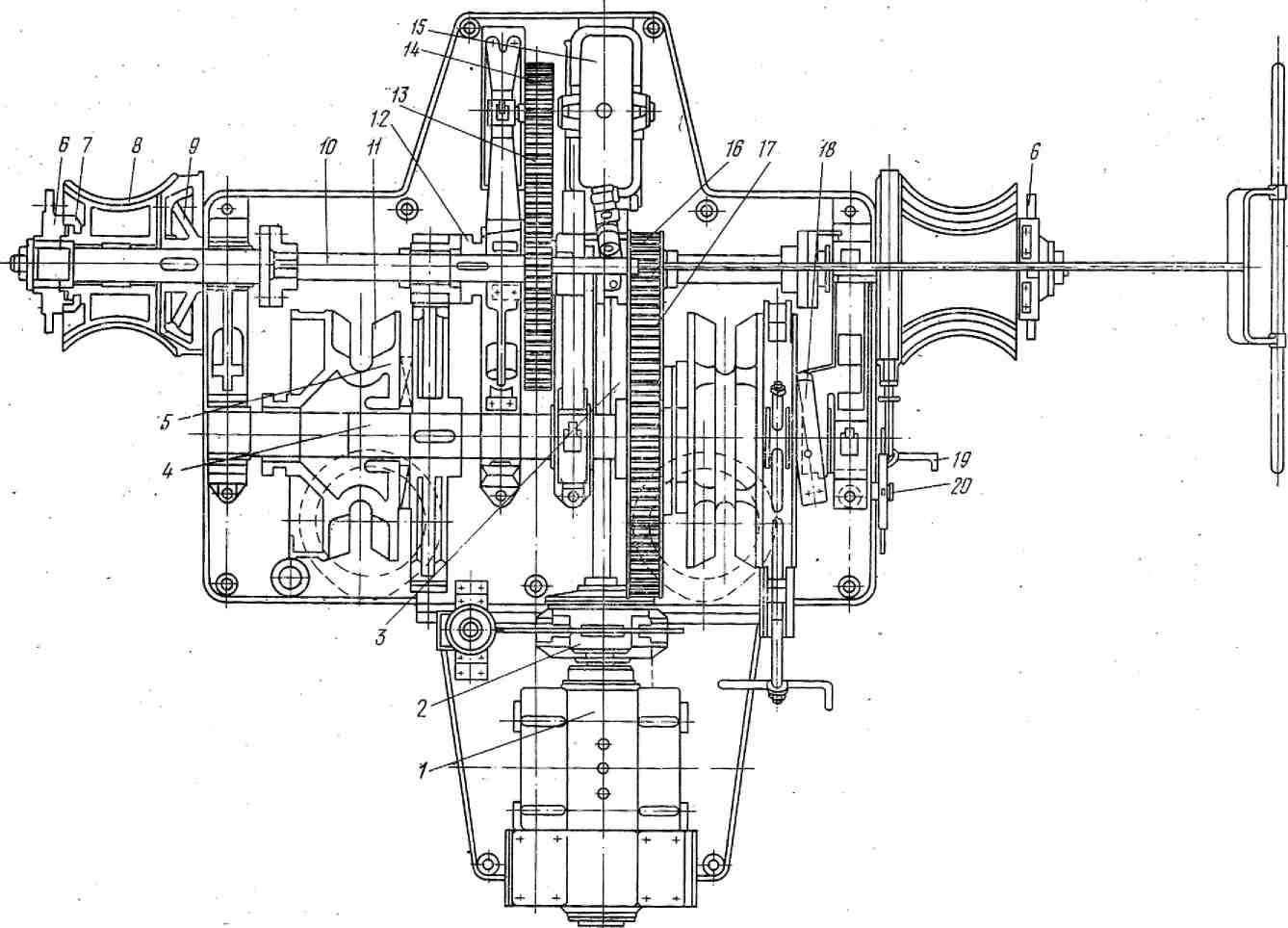
Вал 3 электрического брашпиля (рис. 94), непосредственно соединенный с валом электродвигателя 1, приводит в действие червячную передачу 15. От червячного колеса вращаются шестерни 13 и 14, приводящие во вращение промежуточный вал 10. На конце вала свободно надеты турачки 8, соединенные с валом при помощи конусов 9. Маховики конусов сидят на валу на шпонках. Конус трения прижимается к турачкам под действием втулки 6 с захватами 7, которые зацепляются за кольцевую выточку корпуса турачки. Втулка 6 насажена на конце вала на резьбе, и, вращая втулку в ту или другую сторону, можно воздействовать на конус трения. Каждая турачка снабжена ленточным тормозом, управляемым рукояткой 19.
Промежуточный вал связан с грузовым валом 4 через шестерни 16 и 17. Шестерни 16 снабжены кулачковыми муфтами 12, причем шестерни надеты на вал 4 свободно, а муфты - на шпонках. Кулачковая муфта 12 перемещается по валу особым приводом, имеющим рычаг и винт с маховичком. Нижний конец рычага снабжен вилкой, цапфы которой вставлены в выточку кулачковой муфты, а верхний конец связан со втулкой. Втулка находится на упорном винте, вращаемом маховичком. При вращении маховичка кулачковая муфта сцепляется или расцепляется с шестерней. При этом вращаются одновременно промежуточный и грузовой валы или только промежуточный вал. Шестерни 17 надеты на вал на шпонках, а звездочки (цепные барабаны) 11 -• свободно и соединены с шестернями кулаками 5. Соединение достигается при осевом перемещении звездочек рычагом 18 и винтом, вращаемым за маховичок 20. На валу электродвигателя предусмотрен электромагнитный тормоз 3; кроме того, каждая звездочка имеет ленточный тормоз. Якорь выбирают вручную посредством рычажного привода.
В последние годы гидравлическую передачу от электродвигателя к рабочему органу (гидропривод) применяют не только в рулевых машинах, но и в других механизмах судовых устройств, в частности в брашпилях. Это объясняется тем, что гидропривод обеспечивает большие усилия при малых размерах рабочих элементов, позволяет развить большой крутящий момент на барабане и валу рабочего органа механизма при малой частоте вращения без использования зубчатой Передачи. Регулирование скорости может быть плавным и достигаться простыми средствами. Гидропривод позволяет легко осуществлять дистанционное и автоматическое управление, он отличается надежностью и высокой экономичностью.
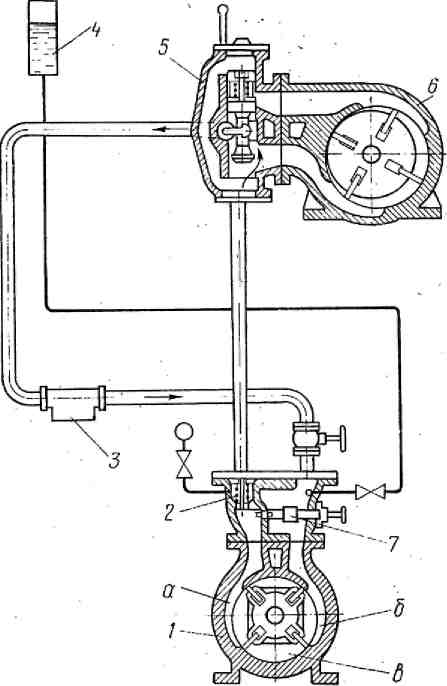
Рис.
94. Электрический брашпиль
Нерегулируемые приводы наиболее просты и имеют насос постоянной подачи.
Общее представление о принципе действия гидропривода для брашпилей, шпилей и грузоподъемных механизмов
Рис.
95. Принципиальная схема действия
гидропривода
Гидропривод состоит из насоса I, гидродвигателя 6, золотника 5 управления, невозвратного 2 и предохранительного клапанов, фильтра 3 и расширительного бака 4. Лопастной насос 1, приводимый во вращение электродвигателем, состоит из корпуса с полостями всасывания б и нагнетания а и камеры в, образованной перемычкой между полостями и ограниченной лопатками.
Лопатки разделяют полости и перемещают жидкость в нагнетательный трубопровод. Ротор с лопатками расположен эксцентрично по отношению к корпусу насоса, поэтому когда лопатки проходят верхнюю половину корпуса, они убираются, а когда нижнюю, выдвигаются. При движении выдвинутой лопатки находящаяся перед ней жидкость выталкивается в полость нагнетания. Предыдущая лопатка после прохода нижней перемычки при подходе к верхней утапливается.
Насос имеет невозвратный клапан 2 для предотвращения обратного вращения насоса при внезапной его остановке или поломке. Для защиты от перегрузки служит предохранительный клапан 7.
Для пополнения утечек жидкости в системе и компенсации температурных изменений объема жидкости служит расширительный бак 4. Для очистки жидкости от частиц, появляющихся при износе трущихся
деталей, и других загрязнений служит фильтр 3 на сливной магистрали. Гидродвигатель 6 состоит из корпуса с полостями, камеры и ротора с лопатками. Лопатки в насосах и гидродвигателях такой .конструкции обычно перемещаются специальными
Рис.
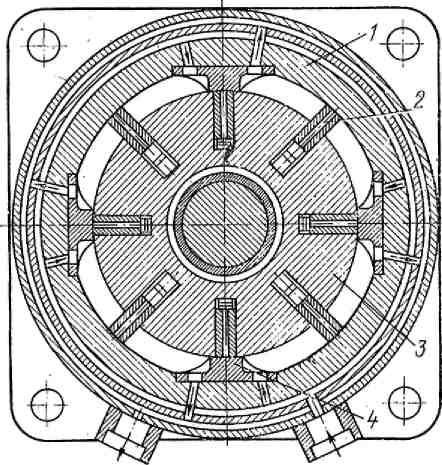
95. Гидродвигатель среднего давления
Устройство гидродвигателя среднего давления, развивающего значительный крутящий момент, показано на рис. 96. В корпусе 1 двигателя находятся четыре рабочих камеры, образованные перемычками 4. Крутящий момент на валу гидродвигателя создается давлением рабочей жидкости, которое воспринимают лопатки 2 ротора 3. В гидродвигателе использованы двойные лопатки с гидравлическим поджимом. Особенностью конструкции является использование подвижных перемычек, прижимающихся к ротору давлением жидкости. Наличие четырех камер позволяет получить большой крутящий момент при небольших размерах двигателя.
Следует отметить, что в системах высокого давления обычно применяют поршневые насосы и гидродвигатели.
Особенностью одной из распространенных схем гидропривода брашпиля и других палубных механизмов (рис. 97) является применение двухкамерных гидродвигателей и насосов с золотниками, изменяющими число участвующих в работе камер и осуществляющими реверс гидродвигателя. Система гидропривода состоит из следующих основных элементов: гидродвигателя /, золотника 2 ступенчатого изменения частоты вращения, золотника 3 реверса, невозвратного клапана 4, золотника 9 изменения подачи насоса, насоса 6, предохранительного клапана 5, фильтра 7, сливного 8 и расширительного 10 баков.

Рис.
97. Схема действия гидропривода
брашпиля
СпускПодъём
При подъеме удвоенного на весу груза (два якоря) золотник: 2 переводится в нижнее положение, при котором вступает в работу нижняя камера гидродвигателя. При этом не только увеличивается вдвое крутящий момент, но и уменьшается скорость подъема груза. Если дополнительно отключить одну камеру наcoca золотником 9, то его подача уменьшается вдвое, при этом скорость подъема будет составлять лишь четверть наибольшей скорости.
Для спуска груза золотник 2 переводится в нижнее положение, чем изменяется направление потока жидкости. Если золотник был установлен на «тяжелый» груз, то при реверсе в сторону спуска будут работать две камеры; при верхнем положении золотника и на подъем и на спуск работает по одной камере. Медленный спуск груза производится за счет мятия (дросселирования) потока жидкости и использования ленточного тормоза.
Схема, аналогичная описанной, может быть использована и для гидропривода швартовных механизмов. Применение гидропривода брашпилей и швартовных механизмов позволяет обеспечить их дистанционное управление простейшими средствами. При использовании гидропривода насос и его электродвигатель располагаются под палубой. Благодаря этому освобождается часть площади палубы и повышается надежность механизма, так как на палубе находятся только те части, которые наименее чувствительны к воздействию внешней среды.
Для выбирания носовых швартовов обычно пользуются брашпилем. Для выбирания средних швартовов можно применить грузовые лебедки, снабжаемые в этом случае турачками. Основными швартовными механизмами являются шпили. Кормовой шпиль может быть использован и для подъема кормового якоря на некоторых судах. Для привода шпилей до последнего времени применяли электродвигатели. Передачу от вала электродвигателя к баллеру шпиля делали червячной или зубчатой. На судах современной постройки широко применяют шпили с гидроприводом.

Устройство универсального шпиля с гидро- или электроприводом пожазано на рис. 98. Привод барабана шпиля осуществляется либо от электродвигателя 1 с электромагнитным тормозом, либо от гидродвигателя 2 с автоматическим тормозом 3 и гидроуправлением. Все механизмы размещены внутри барабана шпиля. Таким образом, размеры механизма снижены до размеров барабана шпиля.
Рис.
98. Шпиль с комбинированным приводом
Помимо шпилей, применяют также швартовые лебёдки с горизонтальным грузовым валом, непосредственно соединенным с гидродвигателем., Эти лебедки и шпили имеют автоматическое управление, поддерживающее постоянно заданное усилие в швартовном конце. При снижении усилия лебедка автоматически подбирает конец, а при натяжении швартова травит его. Судно постоянно остается прижатым к причалу, что позволяет проводить грузовые операции в наиболее выгодных условиях
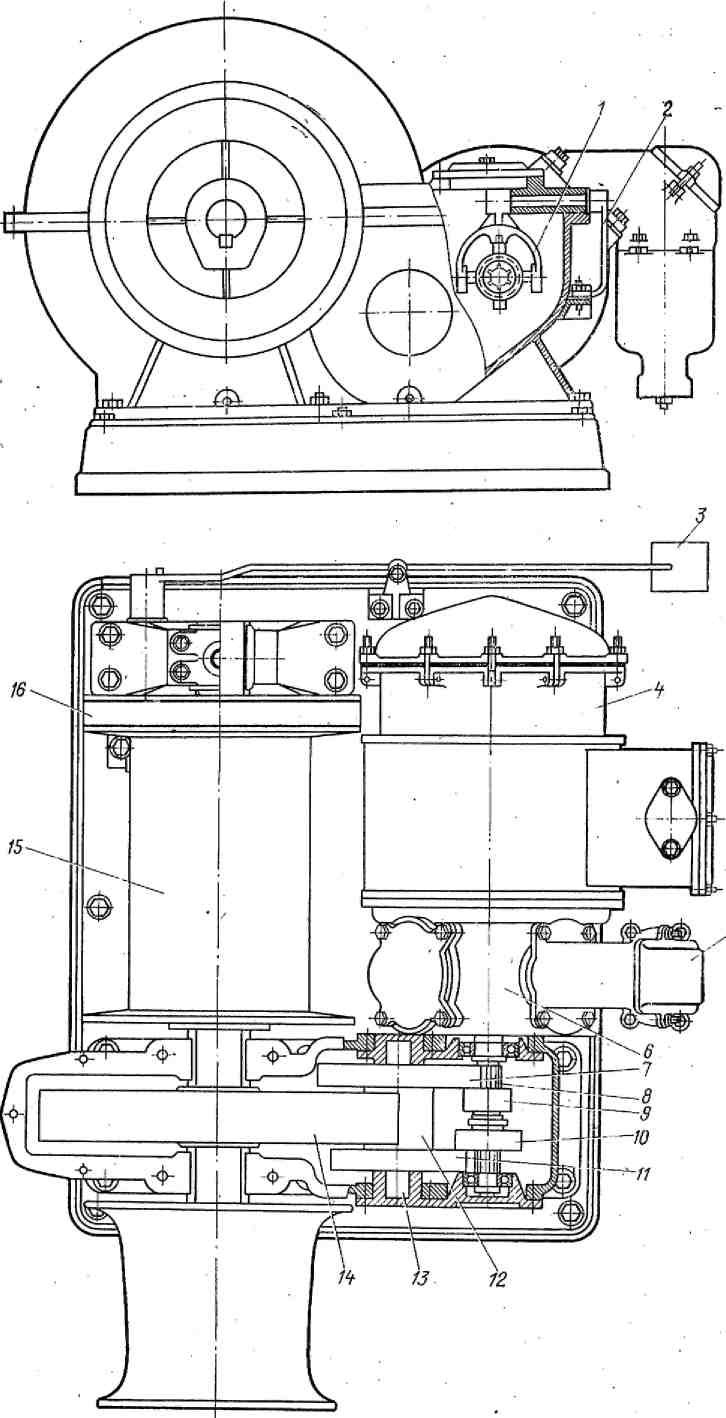
Рис.
99. Электрическая грузовая лебёдка