

4.3. Построение Парето-эффективной границы
Парето-оптимальность некоторого исхода означает, что он не может быть улучшен ни по одному из критериев без ухудшения по какому-либо другому критерию.
Пусть
совокупность функций F
= {f1...,
fm}
осуществляет
отображение множества допустимых
решений D
на
множестве Y
 Rm
. Подмножество
Rm
. Подмножество
 Y
называется эффективной
границей (множеством
точек, оптимальных по Парето), если для
любого вектора у
не существует вектора X,
который
доминирует вектор F-1(у).
Y
называется эффективной
границей (множеством
точек, оптимальных по Парето), если для
любого вектора у
не существует вектора X,
который
доминирует вектор F-1(у).
Для наглядного представления доминирования по Парето и Парето-оптимальности рассмотрим случай двух позитивных критериев f1 и f2. Критерий fj называется позитивным, если лицо, принимающее решение, стремится к его увеличению, и негативным, если ЛПР стремится к его уменьшению.
Векторные оценки исходов представим точками координатной плоскости Of1f2 (рис. 4.2).
На рис. 4.2 изображено множество допустимых исходов для дискретного случая. Здесь Парето-оптимальными являются исходы (4, 5, 7, 8). При этом каждый исход, не являющийся Парето-оптимальным, доминируется по Парето некоторым Парето-оптимальным исходом, не обязательно одним (например, 6 5, 6 7, 10 7, 10 5 (по Парето) и т.д.).
В случае когда множество допустимых исходов является непрерывным, их векторные оценки «заполняют» некоторую область Q на плоскости (рис. 4.3).

В этом случае множество Парето-оптимальных исходов (полужирная линия γ на рис. 4.3) представляет собой часть границы Q, точнее, ее «северо-восточную» часть, так как целью ЛПР при позитивных критериях f1, f2 является увеличение их значений, что соответствует движению внутри области Q вправо и вверх.
Замечания. 1. Область, изображенная на рис. 4.3, является выпуклой, т.е. вместе с любыми двумя своими точками она содержит весь соединяющий их отрезок. В случае невыпуклой области ее Парето-оптимальная граница может иметь более «экзотический» вид (например, состоять из отдельных линий и (или) точек).
Пример такой Парето-оптимальной границы представлен на рис. 4.4.

2. Предположим, что в задаче принятия решения имеются критерии разного характера. Пусть, например, f1 — негативный, а f2 — позитивный критерий. Тогда целью ЛПР будет уменьшение критерия f1 и увеличение критерия f2, что соответствует движению на координатной плоскости «влево и вверх». В этом случае Парето-оптимальная граница области Q представляет собой ее «северо-западную» часть (рис. 4.5).

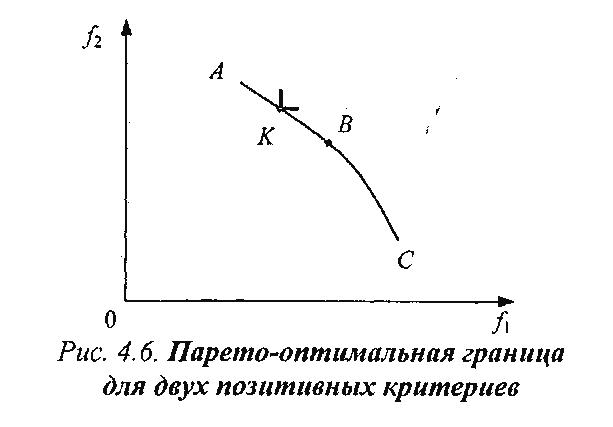
Для позитивных критериев f1, f2 некоторую ломаную ABC (рис. 4.6) можно принять за множество, оптимальное по Парето, если для любой точки К этой ломаной построенный в ней «уголок» пересекается с множеством точек ломаной только в точке К.
4.4. Процедуры решения многокритериальных задач
Рассмотренные примеры показывают, что в типичных случаях Па-рето-оптимальных (эффективных) исходов может быть несколько, а в непрерывном случае — бесконечное множество. Невозможно дать однозначный ответ на вопрос, какой из эффективных исходов следует считать оптимальным для общего случая. Нужно иметь в виду, что любые два эффективных исхода несравнимы относительно доминирования по Парето.
В
самом деле, если для двух исходов (a,
 )
D
выполняется условие
> а (по
Парето), то исход а
не
может быть Парето-оптимальным. Если нет
информации об относительной важности
критериев f1
и
f2,
то
рациональный выбор между а1
и
а2
сделать
невозможно. (Отметим, что нельзя
сделать рациональный выбор и в такой
ситуации, когда, например, имеется 10
критериев, причем а1
лучше
а2
по
одному критерию, но хуже по девяти
остальным. Понятно, что в некоторых
реальных случаях превосходство по
одному критерию может «перевесить»
превосходство по всем остальным.)
)
D
выполняется условие
> а (по
Парето), то исход а
не
может быть Парето-оптимальным. Если нет
информации об относительной важности
критериев f1
и
f2,
то
рациональный выбор между а1
и
а2
сделать
невозможно. (Отметим, что нельзя
сделать рациональный выбор и в такой
ситуации, когда, например, имеется 10
критериев, причем а1
лучше
а2
по
одному критерию, но хуже по девяти
остальным. Понятно, что в некоторых
реальных случаях превосходство по
одному критерию может «перевесить»
превосходство по всем остальным.)
Методика исследования задач принятия решений для многокритериального случая может быть связана с различными подходами.
Первый вариант. Для заданной многокритериальной задачи нахождения решения (ЗНР) находится множество ее эффективных решений, а выбор конкретного решения из множества Парето-оптимальных решений предоставляется ЛПР.
Второй вариант. Производится сужение множества Парето-оптимальных исходов (в идеале — до одного элемента) с помощью некоторых формализованных процедур, что облегчает окончательный выбор исхода для ЛПР. Это сужение может быть произведено при наличии дополнительной информации о критериях или свойствах эффективного решения.
Рассмотрим данный подход подробней. Будем считать, что многокритериальная ЗНР задана в виде
(D; f1,…,fm),
где f1 - позитивные критерии, j = 1, т.
При указании нижних границ критериев дополнительная информация имеет вид:
fj (a*) ≥ γj,
где γj - нижняя граница по j-му критерию;
а* — оптимальный исход, а* D .
Очевидно, что при увеличении значений уj, j = 1,m, Парето-оптимальное множество «сокращается». Пример, представленный на рис. 4.7, демонстрирует это обстоятельство для случая двухкритериальной задачи с критериями f1 и f2.

На рис 4.7 точками отмечены концы М, N Парето-оптимальной границы области Q. Участок АВ, например, соответствует двум требованиям: f1 (а*) > у"1, f2 (а*) > у"2. Основной недостаток данного метода заключается в том, что эффективное решение здесь субъективно, так как зависит от величины нижних границ критериев, а также предпочтений ЛПР.
Субоптимизация
При субоптимизации выделяют один из критериев, а по всем остальным назначают нижние границы. Оптимальным при этом считается исход, максимизирующий выделенный критерий на множестве исходов, оценки которых: по остальным критериям не ниже назначенных.
Пусть, например, f1 — выделенный критерий, а γj — нижняя граница для j-гo критерия, где j = 2, т. Тогда оптимальным считается тот исход а* D, на котором достигается максимум функции f1, рассматриваемой на множестве D1 = {а D: f1(a) > γj (j = 2,т)}.
Возьмем, например, для ЗНР, представленной на рис. 4.6, в качестве выделенного критерия f1, а в качестве нижней границы по критерию f2 — величину γ'2. Тогда оптимальное решение соответствует точке пересечения горизонтальной прямой, проведенной через γ'2, с Парето-оптимальной границей. Очевидно, что при увеличении нижней границы критерия f2 максимум функции f1 уменьшается (не увеличивается).
С помощью метода субоптимизации задача многокритериальной оптимизации превращается в задачу «обычной» оптимизации на суженном допустимом множестве. Окончательное решение здесь также имеет субъективный характер.
Лексикографическая оптимизация
Лексикографическая оптимизация основана на упорядочении критериев по их относительной важности. Далее процедура развивается по шагам. На первом шаге отбираются исходы, которые имеют максимальную оценку по важнейшему критерию.
Если такой исход единственный, то его и считают оптимальным. Если же таких исходов несколько, то среди них отбирают те, которые имеют максимальную оценку по критерию, следующему за важнейшим, и т.д. К недостаткам данного метода следует отнести следующее:
1) трудности в установлении упорядоченности критериев по их относительной важности;
2) фактически принимается во внимание только первый важнейший критерий (например, следующий за ним по важности критерий учитывается только тогда, когда первый достигает максимума на нескольких исходах);
3) в результате лексикографической процедуры не всегда определяется единственный исход.
Метод обобщенного критерия
Весьма важен метод обобщенного критерия — процедура, которая «синтезирует» набор оценок по заданным критериям, называемых частными или локальными, в единую численную оценку, выражающую итоговую полезность для ЛПР данного набора оценок. Таким образом, задание обобщенного критерия сводит задачу многокритериальной оптимизации к задаче однокритериальной оптимизации с целевой функцией f.
Наиболее распространенным обобщенным критерием является взвешенная сумма частных критериев, которая превращает векторную оценку у = (у1,…уm) в скалярную оценку
φ(y) = a1y1 +... + аmуm, аj ≥ 0, j = 1, т
(иногда
требуют, чтобы
 = 1).
= 1).
Числа аj - называют весовыми коэффициентами. Весовой коэффициент аj интерпретируется как «показатель относительной важности» j-го критерия, т.е. чем больше аj, тем больший «вклад» вносит оценка по j-му критерию в итоговую оценку φ(у).
Теорема
4.1. Пусть Q
Y-
произвольное множество векторных
оценок. Если векторная оценка у =(у1
,…
уm
)
доставляет
максимум функции φ(y)
=
=(у1
,…
уm
)
доставляет
максимум функции φ(y)
=
 ;
где все
;
где все
 > 0,
то векторная оценка у
является
Парето-оптимальной на множестве Q.
> 0,
то векторная оценка у
является
Парето-оптимальной на множестве Q.
Доказательство. Предположим противное, т.е. то, что существует векторная оценка у' = (у'1,… у'т) Q, которая доминирует по Парето векторную оценку у*. Тогда при всех j = 1, т выполняется неравенство у'j ≥ уj , причем хотя бы для одного индекса j неравенство выполняется как строгое. Умножая эти неравенства на аj, суммируя их по j = 1,т и учитывая, что все аj > 0, получаем:

т.е. φ(y) > φ(y.), что противоречит условию теоремы.
Замечание. Обратное утверждение справедливо не всегда. Например, в случае выпуклости множества Q можно доказать лишь, что векторная оценка у., Парето-оптимальная на множестве Q, доставляет максимум функции φ(y) = , с некоторым вектором неотрицательных весов aj > 0 .
Метод
перехода от нескольких критериев f1…
fm
к
одному, задаваемому новой функцией
φ =
 ,
называется также сверткой.
,
называется также сверткой.
Если
в качестве
 выступают объемы выпуска продукции
разного вида и
выступают объемы выпуска продукции
разного вида и
ЛПР стремится к увеличению каждого показателя , то в качестве aj могут выступать просто цены продуктов, а свертка будет означать переход от натуральных к одному стоимостному показателю.
Нередко выбор весов (аj) является достаточно сложной задачей, для решения которой используют экспертные оценки, а также методы параметрического программирования.
Следует
отметить, что критерии fj
могут
быть разнородными, поэтому обычно
свертке предшествует нормировка. Один
из ее вариантов состоит в том, что
для каждого критерия
находится максимальное значение
+
из области допустимых значений и
минимальное значение
-
на
множестве Парето-оптимальных решений.
После этого каждая функция
заменяется
на
 по следующему правилу:
по следующему правилу:

Если
все
 являются
линейными функциями, то после
преобразования и нормировки все
будут также линейными функциями.
являются
линейными функциями, то после
преобразования и нормировки все
будут также линейными функциями.
Если
веса нормированы, т.е.  =
1, аj
> 0, j
= 1,
т
, то
свертка φ
=
принимает
значения на отрезке [0,1].
=
1, аj
> 0, j
= 1,
т
, то
свертка φ
=
принимает
значения на отрезке [0,1].
Метод параметрического программирования
Пример 4.2. Рассмотрим пример оценки весов (аj) с помощью метода параметрического программирования:
Z1 (х) = -4х1 + 6х2 → max,
Z2(x) = 2х1 + x2 → max,
- х1
+ х2
≤ 3,
х1
+ х2
≤ 3,
х2 ≤ 5,
х1 + х2 ≤ 10,
х1 ≤ 8,
х1 ≥ 0, х2 ≥ 0.
Решение. Пусть используется свертка без нормировки:
Z = a1Z1 + a2Z2 → max .
Если для весов выполняется нормировка =1, то можно записать:
Z = a1Z1 +(l – a1)Z2 = (2 - 6a1)x1 +(l + 3a1)x2 → max.
Результаты исследования зависимости решения (х1, х2) от выбора веса аj с помощью метода параметрического программирования представлены в табл. 4.1.
Таблица 4.1
а1 |
х1(а1) |
х2(а1) |
0< а1 < 1/11 |
8 |
2 |
а1 = 1/11 |
8λ + 5(1 - λ) |
2λ + 5(1 - λ) |
1/11 < а1 < 1/3 |
5 |
5 |
а1 = 1/3 |
5λ + 2(1 - λ) |
5 |
1/3 < а1 < 1 |
2 |
5 |
Из табл. 4.1 видно, что достаточно лишь грубо оценить, в какой области лежит а1: а1 (0, 1/11) или а1 (1/11;1/3), или а1 (1/3;1), поскольку точное значение а1 внутри какой-либо из указанных областей не оказывает влияния на значения х1, х2.
Метод «идеальной точки»
Пример 4.3. Рассмотрим задачу производственного планирования и метод «идеальной точки».
Для выпуска двух видов продукции Р1 и Р2 используются три вида ресурсов (R1, R2, R3), которые можно приобрести в количестве не более 20, 15 и 39 единиц соответственно.
Задана матрица А, элементы которой показывают нормы расхода ресурсов на выпуск единицы продукции каждого вида:

 12
12
А= 11
31
Известны также цены продуктов: С1 = 17 руб., С2 = 12 руб. за единицу продукции соответствующего вида; цены ресурсов: q1 = 1 руб., q2 = 1 руб., q3 = 4 руб. за единицу ресурса соответствующего вида.
При оценке различных вариантов плана используются три показателя:
Z1 — общий объем выпускаемой продукции (в денежном выражении);
Z2 — общий объем прибыли;
Z3 — отношение прибыли к затратам на приобретение ресурсов.
Для формализации задачи введем переменные х1 и х2, которые означают планируемые объемы выпуска продукции Р1 и Р2. Соответственно имеем:
х 1+
2х2
≤ 20,
1+
2х2
≤ 20,
х1 + х2 ≤ 15,
3х1 + х2 ≤ 39,
х1 ≥ 0, х2 ≥ 0.
Область, определяемая этими ограничениями, представляет собой выпуклый многоугольник с вершинами в точках О (0, 0), А(0, 10), B(10,5), С(12,3), D(13,0).
Введем три целевые функции:
Z1 = 17х1 + 12х2 → max ,
Z2 = 3х1 + 5x2 → max,
Z3 = (3х1 + 5x2) / (14x1+7x2) → max.
В табл. 4.2 приведены значения целевых функций в вершинах области допустимых решений.
Таблица 4.2
Показатель |
А(0, 10) |
В(10, 5) |
С(12, 3) |
D(13, 0) |
Z1 |
120 |
220 |
228 |
208 |
Z2 |
50 |
55 |
51 |
39 |
Z3 |
50/70 |
55/175 |
51/189 |
89/182 |
 Вершина
Вершина
Из табл. 4.2 видно, что если ориентироваться на общий объем продукции (критерий Z1), то оптимальным будет решение x1 = 12, х2 = 3 (точка С). Если в качестве основного критерия использовать показатель прибыли (критерий Z2), то оптимальным решением будет x1 = 10, х2 = 5 (точка В). По критерию Z3 наилучшим является решение x1 = 0, х2 = 10 (точка А).
Выбор конкретного плана (точки х = (х1, х2)) на границе (А, В, С) области допустимых значений зависит от значимости показателей Z1, Z2, Z3 для ЛПР.
Метод «идеальной точки» состоит в том, что ЛПР указывает общий принцип — найти такое решение х, при котором значения fJ(х) как можно меньше отклоняются от оптимальных соответствующих показателей fj*. При выборе конкретного варианта реализации данного принципа следует соблюдать осторожность. Допустим, что в условиях предыдущего примера ЛПР учитывает только критерии Z1 и Z2. Из табл. 4.2 следует, что Z*1 = 228, Z*2 = 55. Для любого допустимого плана X расстояние от (Z2(x), Z2(x)) до «идеальной точки» (Z*1, Z*2) = (228, 55) можно оценивать несколькими способами, которые с точки зрения ЛПР могут оказаться далеко не эквивалентными.
Способ 1.
р (| Z1 (х), Z2 (х) |, Z1*, Z2* |) = | Z1 (х) –Z1*| + |Z2 (х) - Z2*|.
Имеем
Z,(x)<Z*, Z2(x)<Z2,
следовательно, возможно следующее преобразование:
р(| Z, (х), Z2 (х) |, | Z*, Z2* |) = 228 + 55 — Z, (х) - Z2 (х) =
= 283 – Z1(х) – Z2(х) → min.
Очевидно, что это эквивалентно
L(Z) = Z1(х) + Z2(х) → max.
Таким образом, при оценке отклонений от «идеальной точки» с помощью обычных модулей многокритериальная задача сводится к однокритериальной задаче на максимум обычной суммы частных критериев, что может не соответствовать представлениям ЛПР.
Способ 2.
р
(| Z1(х),
Z2
(х) |, | Z*1
Z2*
|) =
 → min.
→ min.
При таком выборе расстояния многокритериальная задача с линейными целевыми функциями сводится к однокритериальной задаче с квадратичной целевой функцией и линейными ограничениями, которая может быть решена одним из методов квадратичного программирования.
Метод последовательных уступок
Метод последовательных уступок решения многокритериальных задач применяется в том случае, когда частные критерии упорядочены в порядке убывания важности.
Предположим, что все критерии позитивны и упорядочены. Находим максимальное значение Z*1 первого по важности критерия в области допустимых решений, решив задачу:
Z1( )
→ max;
х
Q
.
)
→ max;
х
Q
.
Затем исходя из практических соображений и принятой точности назначается величина допустимого отклонения δ1 > 0 критерия Z1 и находится максимальное значение второго критерия Z2 при условии, что значение первого должно отклоняться от максимального не более чем на величину допустимой уступки, т.е. решается задача вида
Z2 ( ) → max,
Z1 ( ) ≥ Z*1 – δ1.
Снова назначается величина уступки δ2 > 0 по второму критерию, которая вместе с первой используется при нахождении условного экстремума третьего частного критерия, и т.д. Наконец, выявляется экстремальное значение последнего по важности критерия Zm при условии, что значение каждого из первых т - 1 частных критериев отличается от экстремального не более чем на величину допустимой уступки. Полученное на последнем этапе решение считается оптимальным. Заметим, что этот метод не всегда приводит к эффективному решению.
Пример 4.4. Решить задачу методом последовательных уступок:
Z1 = -х1 + 2х2 → max,
Z2 = 2х1 + х, → max,
Z3 = х1 - 3х2 → max,
х1 + х2 ≤ 6,
1 ≤ х1 ≤ 3,
1 ≤ x2 ≤ 4,
х1 ≥ 0.
Решение. Будем считать, что допустимые уступки по первым двум критериям равны δ1 = 3 , δ2 = 5 /3.
Максимизируем функцию Z1 что легко сделать графически (рис. 4.8).
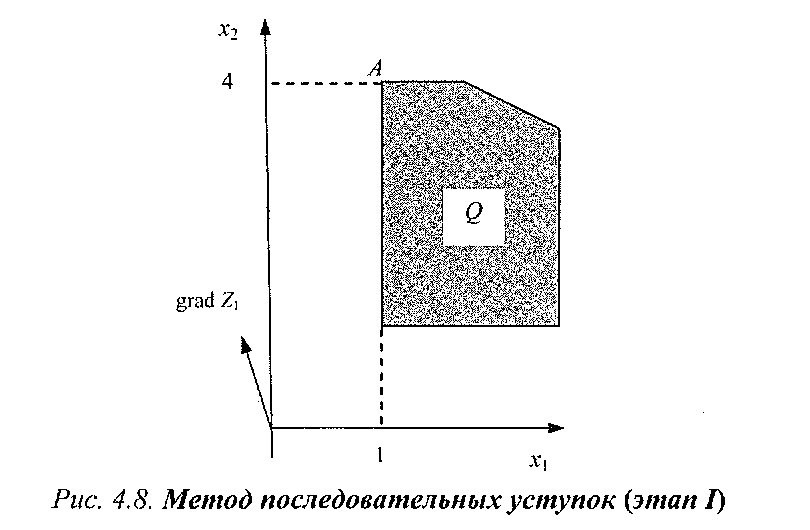
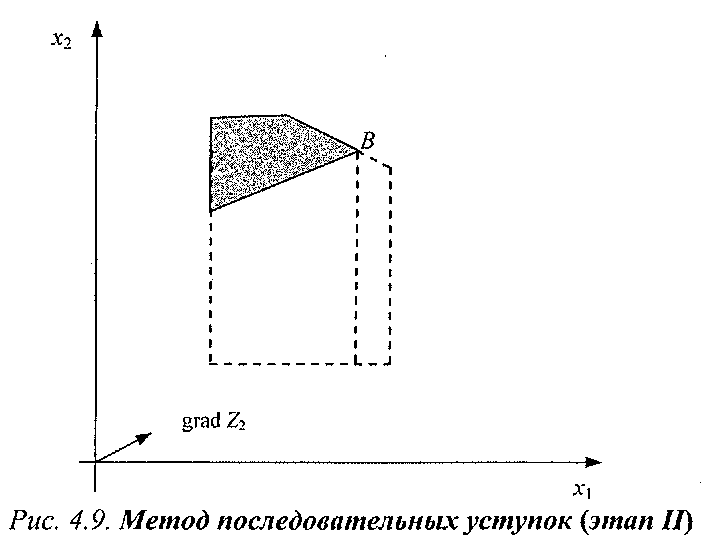
Получаем х*1 = 1, х2* = 4, Z*1 = Z1max = Z1(A) = 7 . Переходим к максимизации Z2 при условиях х1 + х2 ≤ 6; 1 ≤ х1 ≤ 3; 1 ≤ х2 ≤ 4 и дополнительном ограничении, позволяющем учесть, что по критерию Z нельзя уступить более чем на 3. Так как Z1* - δ1 = 4, то дополнительное ограничение имеет вид:
-х1 + 2х2 ≥ 4 .
Решаем задачу:
Z2 = 2х1 + х2 → max,
х1 +х2 ≤ 6,
1 ≤ х1 ≤ 3,
1≤ х2 ≤ 4,
-х1 + 2х2 ≥ 4.
Решая графически эту задачу, получаем оптимальную точку 5(8/3, 10/3), Z2max = Z2* =Z2(B) = 26/3 (рис. 4.9).
Теперь уступаем по критерию Z2 на δ2, получаем второе дополнительное ограничение 2х1 + х2 ≥ 7.
Максимизируем Z3, решая следующую задачу:
Z3 = х1 - 3х2 → max,
х1 + х2 ≤ 6,
1≤ х1 ≤ 3,
1 ≤ х2 ≤ 4,
-х1 + 2х2 ≥ 4,
2х1 + х2 ≥ 7.
Из рис. 4.10 представлено графическое решение данной задачи.
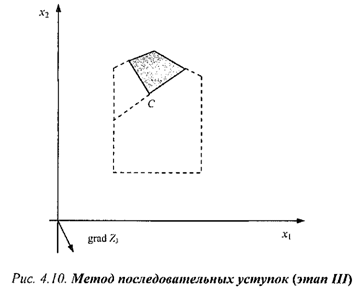
Координаты точки С: х1 = 2, х2 = 3. Эти значения и есть решение трехкритериальной задачи, полученное методом последовательных уступок.
Вопросы и задачи
Чем отличается задача многокритериальной оптимизации от общей задачи математического программирования?
Что является оценкой допустимого решения в задаче многокритериальной оптимизации?
Объясните смысл понятия доминирования по Парето.
Какие решения задачи многокритериальной оптимизации называются оптимальными по Парето?
Инвестор рассматривает четыре инвестиционные операции со случайными эффективностями, которые описываются случайными величинами Е1, Е2, Е3, Е4 с известными рядами распределения:
(0, 1/2) (2, 1/4) (4, 1/8) (16, 1/8);
(2,1/2) (4,1/4) (6,1/8) (18,1/8);
(0, 1/4) (4, 1/4) (6, 1/3) (12, 1/6);
(2, 1/4) (6, 1/4) (8, 1/3) (14, 1/6).
Определите, какие из этих операций оптимальны по Парето.
Объясните, почему независимо от предпочтений лица, принимающего решение, лучшим может быть признано только решение, оптимальное по Парето.
Чем отличается оптимальность решений по Парето и по Слейтеру?
Найдите эффективные и слабоэффективные решения для задачи (4.2).
Что представляет собой множество Парето-оптимальных исходов, если множество допустимых исходов является непрерывным?
Как выглядит Парето-оптимальная граница для двух негативных критериев, если допустимая область имеет вид, изображенный на рис. 4.5?
Решите задачу (4.3) для свертки всех критериев с равными весовыми коэффициентами.
В чем смысл нормировки критериев, проводимой перед их сверткой?
Решите задачу (4.2) методом идеальной точки, если в качестве расстояния взять обычное расстояние R2.
Решите задачу (4.2) методом последовательных уступок, считая, что критерии упорядочены в порядке убывания важности, причем величина уступки по первому критерию равна 20.
Постройте область компромисса в задаче двухкритериальной оптимизации:
Z1 = (2х1 + 3х2) → max,
Z2 = (х1 - 2х2) → max,
х1 - 2х2 ≤ 1,
х1 + х2 ≥ 1,
-х1 + х2 ≤ 1,
0 ≤ х1 ≤ 3,
0 ≤ х2 ≤ 2.
Методом последовательных уступок решите задачу трехкритериальной оптимизации:
a) Z1 = (2х1 + 3х2) → max,
Z2 = (2х1 – х2) → max,
Z3 = х2 → min,
δ1 = 9, δ2 = 3, -2x1 + x2 ≤ 2, 2x1 - x2 ≤ 5, 1 ≤ x1 ≤ 4, 1 ≤ x2 ≤ 6;
б) Z1 = х1 → max, Z2 = (х1 + x2) → max, Z3 = (x1 + 2x2) → max, δ1 =5, δ2 = 1,
x1 + x2 ≤ 6, x2 ≤ 3, x1 ≥ 0, x2 ≥ 0.