

D) Простота синтеза;
$$$0241
Что является задачей анализа кулачкового механизма:
E) Определение закона движения толкателя по заданным размерам кулачкового механизма и закону движения кулачка.
$$$0242
Что является задачей синтеза кулачкового механизма:
D) Построение профиля кулачка по заданному закону движения толкателя;
$$$0243
Укажите профиль кулачка, который называется рабочим:
A) Профиль, по которому перекатывается ролик толкателя;
$$$0244
Укажите название графика функции, который получается при графическом интегрировании функции тангенциального ускорения at = at ( t ) :
D) Угловой скорости = ( t );
$$$0245
У кажите
положение механизма, в котором ускорение
толкателя равно a
= - ∞, т.е. положение механизма, в котором
будут возникать жесткие удары:
кажите
положение механизма, в котором ускорение
толкателя равно a
= - ∞, т.е. положение механизма, в котором
будут возникать жесткие удары:
E) 4.
$$$0246
При каком законе движения толкателя наблюдается безударная работа кулачкового механизма.
D) При линейно-убывающем законе изменения ускорения толкателя;
$$$0247
Укажите механизм, которому проще воспроизвести указанный на рисунке =(t) закон движения ведомого звена:
D) Кулачковый механизм с коромыслом;
$$$0248
Укажите название механизма изображенного на схеме:

E) Трехрядная коническая зубчатая передача.
$$$0249
Укажите название кинематической цепи, все звенья которой совершают определенные движения при заданном законе движения одного из звеньев:
C) Механизмом;
$$$0250
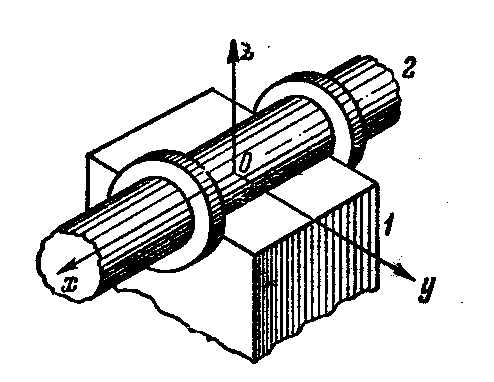
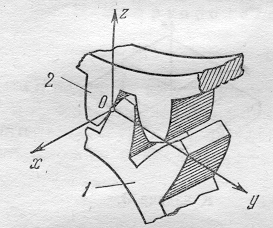
Укажите класс кинематической пары “вал-втулка” изображенной на рисунке:
A) Первого класса;
$$$0251
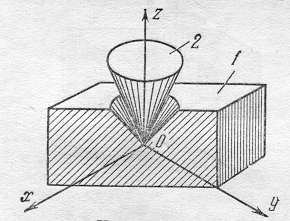
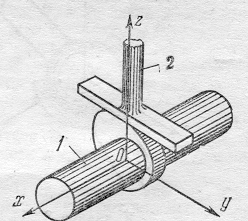
Укажите класс кинематической пары изображенной на рисунке:
1 2
C) Третьего класса;
$$$0252
Укажите звено с пассивными связями:
E) Звено 5.
$$$0253
Укажите степень подвижности механизма пантографа:
B) W = 1;
$$$0254
Укажите класс механизма изображенного на рисунке:
C) Третьего класса;
$$$0255
Укажите степень подвижности механической руки робота:

C) W = 2;
$$$0256
Укажите степень подвижности цилиндрической зубчатой передачи:
B) W = 1;
$$$0257
Укажите зависимость для определения радиуса кривошипа ОА для четырехзвенного механизма, изображенного на рисунке:
E)
х = O
B![]() -O
B
;
-O
B
;
$$$0258
На рисунке представлены механические характеристики асинхронного электродвигателя переменного тока, механического пресса, электродвигателя постоянного тока с последовательным возбуждением, вентилятора и грузоподъемной машины. Укажите механическую характеристику пресса:
B) Диаграмма 2;
$$$0259
Укажите зависимость для определения К. П. Д. первичного механизма изображенного на рисунке:
D)
х = 1-![]() ;
;
$$$0260
Укажите пункт информации, с которым Вы не согласны. При малых значениях углов передачи θ в рычажных механизмах:
D) Возрастает вероятность заклинивания механизма;
$$$0261
Укажите основную причину равенства нулю момента сил инерции Мu кривошипа АВ, вращающегося с угловой скоростью ω:

B) Угловая скорость кривошипа постоянна
$$$0262
Укажите зависимость, по которой не может быть определена сила инерции массы m:
D) х = m∙ОА;
$$$0263
Укажите, что определяется из плана сил при силовом расчете ведущего звена:

A) Величина уравновешивающей силы
$$$0264
Укажите выражение принципа возможных перемещений данное Н.Е.Жуковским.:
B)
![]() +M(F
)
= 0;
+M(F
)
= 0;
$$$0265
Определите приведенную к точке А кривошипа ОА силу F от действия заданной силы F если дано: F=100H; OA=0,1м; АВ=0,2; О В= 0,2м; АС=0,5 АВ:
A) Fпр = 0Н
$$$0266
Укажите зависимость для определения мощности силы трения механизма, приведенной к точке А:
E) х = P +P +P +P ;
$$$0267
Укажите условие самоторможения в резьбовом соединении:
A) Угол подъема больше угла трения;
$$$0268
Укажите зависимость для определения момента трения во вращательной кинематической паре при контакте двух тел по боковой поверхности цилиндра:
A) х = R·ρ;
$$$0269
У кажите
соотношение, при котором будет наблюдаться
только чистое скольжение цилиндра по
неподвижной плоскости:
кажите
соотношение, при котором будет наблюдаться
только чистое скольжение цилиндра по
неподвижной плоскости:
E)
f ![]() .
.
$$$0270
Определить работу приведённого момента за один оборот, если: МПрmax = 100 Н М:
C) АПР = 240;
$$$0271
Укажите зависимость для определения кинетической энергии звена, совершающего плоскопараллельные движения:
C)
![]()
$$$0272
Укажите зависимость для определения момента инерции маховика:
C)
![]()
$$$0273
Укажите зависимость, в которой допущена ошибка.
B)
aw =
![]() ;
;
$$$0274
Укажите зависимость для определения коэффициента смещения:
D)
x =![]() ;
;
$$$0275
Определите общее передаточное число зубчатого механизма. Дано: z1=20; z2=40; z3=15; z4=30;

E) u1H = 9.
$$$0276
Определите
силу инерции Fu
вращающейся массы m
по следующим данным: m
= 10 кг;
= 10 с-1 =
сonst,
AB
= 0,1 м;
B m
=const
A




D) Fu = 150 H;
$$$0277
Что такое “звено механизма”?
C) деталь или группа деталей, совершающих движение как одно твердое тел;
$$$0278
Что такое “стойка”?
A) неподвижное звено механизма;
$$$0279
Что такое “кривошип”?
A) вращающееся звено механизма, которое может совершать полный оборот вокруг неподвижной оси;
$$$0280
Что такое “коромысло”?
B) вращающееся звено механизма, которое может совершать только неполный оборот вокруг неподвижной оси;
$$$0281
Что такое “шатун”?
C) звено механизма, образующее вращательно-поступательные кинематические пары только с подвижными звеньями;
$$$0282
Что такое “ползун”?
C) звено механизма, перемещающееся по неподвижной направляющей;
$$$0283
Что такое “кулиса”?
B) звено механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару – подвижная направляющая;
$$$0284
Что такое “зубчатое колесо”?
A) звено механизма, имеющее замкнутую систему зубьев, обеспечивающее непрерывное движение другого зубчатого звена;
$$$0286
Что такое “кинематическая пара”?
A) неподвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение;
B) подвижное соединение нескольких соприкасающихся звеньев, допускающее их относительное движение;
C) подвижное соединение двух соприкасающихся звеньев, допускающее их переносное движение;
D) подвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение;
E) подвижное соединение нескольких звеньев, допускающее их относительное движение.
$$$0287
Что такое “низшая кинематическая пара”?
A) кинематическая пара, в которой требуемое переносное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
B) кинематическая пара, в которой требуемое вращательное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
C) кинематическая пара, в которой требуемое относительное движение обеспечивается непостоянством контакта ее элементов по плоскости;
D) кинематическая пара, в которой требуемое относительное движение обеспечивается непостоянством контакта ее элементов по поверхности;
E) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости.
$$$0288
Что такое “высшая кинематическая пара”?
A) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
B) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по линии или в точке;
C) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по линии;
D) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов в точке;
E) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по плоскости.
$$$0289
Что такое “кинематическая цепь”?
A) группа звеньев связывающих между собой поступательные кинематические пары;
B) группа звеньев связывающих между собой вращательные кинематические пары;
C) группа звеньев связывающих между собой поступательные и вращательные пары;
D) группа звеньев связывающих между собой кинематические группы;
E) группа звеньев связывающих между собой кинематические пары.
$$$0290
Что такое “замкнутая кинематическая цепь”?
A) группа звеньев связывающих между собой кинематические пары;
B) кинематическая цепь, в которой каждое звено связано с двумя другими звеньями;
C) кинематическая цепь, в которой каждое звено связано с двумя другими кинематическими цепями;
D) кинематическая цепь, в которой каждое звено связано кинематической парой с двумя другими звеньями;
E) кинематическая цепь, в которой только одно звено связано кинематической парой с двумя другими звеньями.
$$$0291
Что такое “разомкнутая кинематическая цепь”?
A) кинематическая цепь, в которой имеется хотя бы два звена только одной кинематической пары;
B) кинематическая цепь, в которой имеется хотя бы одно звено только одной кинематической пары;
C) кинематическая цепь, в которой каждое звено связано кинематической парой с двумя другими звеньями;
D) группа звеньев связывающих между собой кинематические пары;
E) кинематическая цепь, в которой каждое звено связано с двумя другими кинематическими цепями.
$$$0292
Что такое “связь в ТММ”?
A) ограничения, накладываемые кинематической связью на относительное движение звена или тела;
B) ограничения, накладываемые кинематической парой на переносное движение звена или тела;
C) ограничения, накладываемые кинематической парой на вращательное движение звена или тела;
D) ограничения, накладываемые кинематической парой на движение звена или тела;
E) ограничения, накладываемые кинематической парой на относительное движение звена или тела.
$$$0293
Что такое “обобщенная координата”?
A) независимая координата, однозначно определяющая положение всех звеньев механизма относительно стойки;
B) независимая координата, однозначно определяющая положение всех звеньев механизма;
C) зависимая координата, однозначно определяющая положение всех звеньев механизма;
D) независимая полярная координата, однозначно определяющая положение всех звеньев механизма;
E) независимая декартова координата, однозначно определяющая положение всех звеньев механизма.
$$$0294
Что такое “метрическая связь ”?
A) связь, не повторяющая действия других звеньев механизма;
B) связь, повторяющая действия других звеньев механизма;
C) связь, не повторяющая действия других связей механизма;
D) связь, повторяющая действия других связей механизма;
E) связь, не повторяющая действия другого звена механизма.
$$$0295
Что такое “структурная группа ”?
A) группа звеньев, связанных между собой одноподвижными кинематическими парами, не изменяя ЧСС механизма, к которому она присоединена;
B) группа звеньев, связанных между собой одноподвижными кинематическими парами, не изменяя ЧУС механизма, к которому она присоединена;
C) группа звеньев, связанных между собой одноподвижными кинематическими парами, не изменяя ЧСС и ЧУС механизма, к которому она присоединена;
D) группа звеньев, связанных между собой одноподвижными кинематическими парами;
E) группа звеньев, связанных между собой неподвижными кинематическими парами.
$$$0296
Что такое “поводок”?
A) звено структурной группы, с помощью которой оно присоединяется к другим звеньям;
B) звено структурной группы, с помощью которой оно присоединяется к другому звену;
C) структурная группа, с помощью которой оно присоединяется к механизму;
D) звенья структурной группы, с помощью которой оно присоединяется к механизму;
E) звено структурной группы, с помощью которой оно присоединяется к механизму.
$$$0297
Верно ли утверждение: присоединение и отбрасывание структурной группы изменяет ЧСС механизма, это следует из условия существования структурной группы;
A) да;
B) нет;
C) возможно при определенном условии;
D) для плоских механизмов;
E) для пространственных механизмов.
$$$0298
Верно ли утверждение: структурные группы являются статически неопределимыми системами.
A) да;
B) нет;
C) возможно при определенном условии;
D) для плоских механизмов;
E) для пространственных механизмов.
$$$0299
Что такое “входное звено механизма”?
A) звенья, совершающие движение, преобразуемое механизмом, в требуемое движение других звеньев;
B) звено, совершающее движение, преобразуемое механизмом, в требуемое движение других звеньев;
C) звено, совершающее движение, преобразуемое механизмом, в установленное движение других звеньев;
D) звено, совершающее движение, преобразуемое механизмом, в произвольное движение других звеньев;
E) звено, совершающее движение, преобразуемое другими звеньями, в требуемое движение других звеньев.
$$$0300
Что такое “выходное звено”?
A) звено, совершающее движение, для выполнения которого предназначено звено;
B) группа звеньев, совершающее движение, для выполнения которого предназначен механизм;
C) звено, совершающее движение, для выполнения которого предназначен механизм;
D) звено, совершающее возвратное движение, для выполнения которого предназначен механизм;
E) звено, совершающее периодическое движение, для выполнения которого предназначен механизм.
$$$0301
Что такое “ведущее звено”?
A) звено механизма, для которого сумма сложных работ внешних сил больше нуля;
B) звено механизма, для которого сумма элементарных работ внешних сил больше нуля;
C) звено механизма, для которого сумма элементарных работ внутренних сил больше нуля;
D) звено механизма, для которого сумма элементарных работ внутренних сил меньше нуля;
E) звено механизма, для которого сумма элементарных работ внутренних сил сопротивления больше нуля.
$$$0302
Что такое “ведомое звено”?
A) звено механизма, для которого сумма элементарных работ внешних сил больше нуля;
B) звено механизма, для которого сумма элементарных работ внешних сил меньше нуля;
C) звено механизма, для которого сумма элементарных работ внутренних сил больше нуля;
D) звено механизма, для которого сумма элементарных работ внутренних сил меньше нуля;
E) звено механизма, для которого сумма элементарных работ внутренних сил сопротивления больше нуля.
$$$0303
Для чего применяется формула Чебышева?
A) для определения ЧСС механизма;
B) для определения ЧУС механизма;
C) для определения числа 2ПГ;
D) для определения числа звеньев в механизме;
E) для определения числа условий связей в механизме.
$$$0304
Для чего применяется формула Малышева?
A) для определения ЧУС механизма;
B) для определения ЧСС механизма;
C) для определения числа 2ПГ;
D) для определения числа звеньев в механизме;
E) для определения числа условий связей в механизме.
$$$0305
Сколько метрических связей существует в синусном механизме?
A) 0;
B) 3;
C) 2;
D) 4;
E) 1.
$$$0306
Сколько метрических связей существует в тангенсном механизме?
A) 0;
B) 3;
C) 2;
D) 4;
E) 1.
$$$0307
Наука о теории механизмов и машин это:
A) наука об общих методах проектирования зубчатых механизмов и исследования кинематическо-динамических параметров механизмов;
B) наука об общих методах проектирования плоских механизмов и зубчатых колес;
C) наука об общих методах исследования и проектирования схем механизмов и машин;
D) наука об общих методах проектирования станков;
E) наука о прикладных методах исследования и проектирования схем механизмов и машин.
$$$0308
Укажите, при каких условиях применима теорема о подобии фигур, образованных скоростями и ускорениями на планах скоростей и ускорений, фигурам на механизме?
A) для точек, принадлежащих одному звену механизма;
B) он состоит из трех и более зубчатых колес;
C) для точек, принадлежащих двум разным звеньям механизма;
D) для точек, принадлежащих трем разным звеньям механизма;
E) для точек, принадлежащих одному звену двух 2ПГ.
$$$0309
Что такое аналог скорости рабочего звена, совершающего поступательное движение, и какую он имеет единицу измерения?
A) отношение угловой скорости звена к угловой скорости кривошипа, единица измерения - м;
B) отношение угловой скорости звена к угловой скорости кривошипа, единица измерения – мм;
C) отношение угловой скорости звена к угловой скорости кривошипа, единица измерения - м^2;
D) отношение скорости звена к угловой скорости кривошипа, единица измерения – м;
E) отношение угловой скорости звена к угловой скорости кривошипа, единица измерения - мм^2.
$$$0310
Что называется 2ПГ?
A) два соединенных звена;
B) три соединенных звена;
C) сочетание звеньев, связанных низшими парами, присоединение которых изменяет степень свободы механизма;
D) сочетание двух звеньев, связанных низшими парами, присоединение которых изменяет степень свободы механизма;
E) сочетание звеньев, связанных низшими парами, присоединение которых не изменяет степень свободы механизма.
$$$0311
Что можно найти с помощью теоремы о подобии?
A) отношение угловой скорости звена к угловой скорости кривошипа;
B) скорость точки звена, если известны скорость и ускорение одной точки звена;
C) ускорение точки звена, если известны скорость и ускорение одной точки звена;
D) скорость и ускорение любой точки звена, если известны скорость и ускорение одной точки звена;
E) ускорение точки звена, если известно ускорение одной точки звена.
$$$0312
Когда применяется 2-й способ разложения движения при кинематическом исследовании и какими будут переносное и относительное движения?
A) когда известно движение одной точки звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – вращательное, относительное – поступательное;
B) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – вращательное, относительное – поступательное;
C) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – поступательное;
D) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – вращательное;
E) когда известно движение хотя бы двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару.
$$$0313
В чём состоит кинематическая определимость 2ПГ?
A) по заданным скоростям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре;
B) по заданным ускорениям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре;
C) по заданным скоростям и ускорениям в крайней и внутренней кинематических парах можно найти скорость и ускорение в другой крайней кинематической паре;
D) по заданным скоростям и ускорениям в двух крайних кинематических парах можно найти скорость и ускорение в другой внутренней кинематической паре;
E) по заданным скоростям и ускорениям в двух крайних кинематических парах можно найти скорость и ускорение в другой внешней кинематической паре.
$$$0314
Что такое аналог углового ускорения рабочего звена, совершающего вращательное или плоско – параллельное движение?
A) отношение углового ускорения звена к квадрату угловой скорости кривошипа, величина – м;
B) отношение углового ускорения звена к квадрату угловой скорости кривошипа, величина – мм;
C) отношение углового ускорения звена к квадрату угловой скорости кривошипа, величина – мм^2;
D) отношение углового ускорения звена к квадрату угловой скорости кривошипа, величина – м^2;
E) отношение углового ускорения звена к квадрату угловой скорости кривошипа, величина – безразмерная.
$$$0315
Как определяется величина и направление угловой скорости звена?
A) отношением абсолютной скорости центра масс звена к расстоянию до кривошипа и её направлением;
B) отношением абсолютной тангенциальной скорости центра масс звена к расстоянию до кривошипа и её направлением;
C) отношением абсолютной касательной скорости центра масс звена к расстоянию до кривошипа и её направлением;
D) отношением абсолютной скорости центра масс звена к расстоянию до стойки и её направлением;
E) отношением абсолютной нормальной скорости центра масс звена к расстоянию до кривошипа и её направлением.
$$$0316
Назовите механизм, в который входит двухповодковая группа 5-го вида – с одной внутренней и одной внешней поступательной парой?
A) косинусный механизм;
B) тангенсный механизм;
C) гипертангенсный механизм;
D) котангенсный механизм;
E) синусный механизм.
$$$0317
Назовите механизм, в который входит 2-х поводковая группа 1-го вида – трехшарнирная?
A) косинусный механизм;
B) тангенсный механизм;
C) синусный механизм;
D) кривошипно-ползунный механизм;
E) шарнирный четырехзвенник.
$$$0318
Как движется звено, совершающее вращательное движение, если угловые скорости и ускорения совпадают по направлению?
A) Равномерно;
B) Замедленно;
C) не движется;
D) ускоренно;
E) поступательно.
$$$0319
Когда применяется 1-й способ разложения движения при кинематическом исследовании и какими будут переносное и относительное движения?
A) когда известно движение одной точки звена и требуется определить движение другой точки того же звена. Переносное движение – поступательное, относительное – вращательное;
B) по заданным скоростям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре. Переносное движение – поступательное, относительное – поступательное;
C) по заданным ускорениям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре. Переносное движение – вращательное, относительное – поступательное;
D) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – поступательное;
E) когда известно движение хотя бы двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – поступательное.
$$$0320
Как определяется величина и направление углового ускорения звена?
A) отношением абсолютной скорости центра масс звена к расстоянию до кривошипа и её направлением;
B) отношением абсолютной тангенциальной скорости центра масс звена к расстоянию до кривошипа и её направлением;
C) отношением тангенциального относительного ускорения к расстоянию между точками звена и направлением тангенциального ускорения;
D) отношением нормального относительного ускорения к расстоянию между точками звена и направлением тангенциального ускорения;
E) отношением нормального относительного ускорения к расстоянию между точками звена и направлением нормального ускорения.
$$$0321
Назовите механизм, в который входит двухповодковая группа 3-го вида – с одной внутренней поступательной парой?
A) косинусный механизм;
B) тангенсный механизм;
C) синусный механизм;
D) кулисный механизм;
E) шарнирный трехзвенник.
$$$0322
Укажите способ замены высшей пары с целью получения механизма с одними низшими парами?
A) добавлением 1 звена с 2 низшими парами;
B) добавлением 1 звена с 1 низшей парой;
C) добавлением 1 звена с 1 высшей парой;
D) добавлением 2 звеньев с 1 низшей парой;
E) добавлением 3 звеньев с 1 низшей парой.
$$$0323
Назовите механизм, в который входит двухповодковая группа 2-го вида - с одной внешней поступательной парой?
A) косинусный механизм;
B) тангенсный механизм;
C) синусный механизм;
D) кривошипно–ползунный механизм;
E) шарнирный трехзвенник.
$$$0324
Что такое аналог угловой скорости звена, совершающего вращательное или плоскопараллельное движение, и какую он имеет единицу измерения?
A) отношение угловой скорости звена к угловой скорости кривошипа, величина – м;
B) отношение угловой скорости звена к угловой скорости кривошипа, величина – безразмерная;
C) отношение угловой скорости звена к угловой скорости кривошипа, величина – мм;
D) отношение угловой скорости звена к угловой скорости кривошипа, величина – мм^2;
E) отношение угловой скорости звена к угловой скорости кривошипа, величина – м^2.
$$$0325
Когда применяется 2-й способ разложения движения при кинематическом исследовании и какими будут переносное и относительное движения?
A) когда известно движение одной точки звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – вращательное, относительное – поступательное;
B) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – вращательное, относительное – поступательное;
C) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – поступательное;
D) когда известно движение двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару. Переносное движение – поступательное, относительное – вращательное;
E) когда известно движение хотя бы двух точек звена и требуется определить движение одноимённой точки другого звена при переходе через поступательную пару.
$$$0326
В чём состоит кинематическая определимость 2ПГ?
A) по заданным скоростям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре;
B) по заданным ускорениям в крайней и внутренней кинематических парах можно найти ускорение в другой крайней кинематической паре;
C) по заданным скоростям и ускорениям в крайней и внутренней кинематических парах можно найти скорость и ускорение в другой крайней кинематической паре;
D) по заданным скоростям и ускорениям в двух крайних кинематических парах можно найти скорость и ускорение в другой внутренней кинематической паре;
E) по заданным скоростям и ускорениям в двух крайних кинематических парах можно найти скорость и ускорение в другой внешней кинематической паре.
$$$0327
Какие скорости и ускорения образуют на планах скоростей и ускорений фигуры, подобные фигурам, образованным точками на механизме согласно теореме о подобии?
A) Поступательные;
B) Тангенциальные;
C) Относительные;
D) Нормальные;
E) вращательные.
$$$0328
Назовите механизм, в который входит двухповодковая группа 4-го вида – с одной внутренней вращательной парой?
A) косинусный механизм;
B) котангенсный механизм;
C) синусный механизм;
D) тангенсный механизм;
E) кривошипно-ползунный.
$$$0329
Что такое аналог ускорения рабочего звена, совершающего поступательное движение и какую он имеет единицу измерения?
A) отношение ускорения звена к квадрату угловой скорости кривошипа, единица измерения – м;
B) отношение скорости звена к квадрату угловой скорости кривошипа, единица измерения – м;
C) отношение скорости звена к квадрату угловой скорости кривошипа, единица измерения – м/c;
D) отношение скорости звена к квадрату угловой скорости кривошипа, единица измерения – м/c^2;
E) отношение скорости звена к квадрату угловой скорости кривошипа, единица измерения – мм/c^2.
$$$0330
Чему должно быть кратно число подвижных звеньев и число низших пар в 2ПГ?
A) 1 и 2;
B) 2 и 3;
C) 2 и 4;
D) 3 и 7;
E) 2 и 1.
$$$0331
Когда возникает ускорение Кориолиса, как определяется его величина и направление?
A) при переносном вращательном и относительном поступательном движениях. Величина ускорения Кориолиса равна удвоенному произведению угловой скорости переносного движения на поступательную скорость относительного движения. Направление ускорения Кориолиса находится поворотом вектора относительной скорости поступательного движения на 90 градусов против угловой скорости переносного движения.;
B) при переносном относительном и вращательном поступательном движениях. Величина ускорения Кориолиса равна удвоенному произведению угловой скорости переносного движения на поступательную скорость относительного движения. Направление ускорения Кориолиса находится поворотом вектора относительной скорости поступательного движения на 90 градусов против угловой скорости переносного движения;
C) при переносном вращательном и относительном поступательном движениях. Величина ускорения Кориолиса равна удвоенному произведению угловой скорости переносного движения на поступательную скорость относительного движения. Направление ускорения Кориолиса находится поворотом вектора относительной скорости поступательного движения на 90 градусов в сторону угловой скорости переносного движения;
D) при переносном относительном и вращательном поступательном движениях. Величина ускорения Кориолиса равна произведению угловой скорости переносного движения на поступательную скорость относительного движения. Направление ускорения Кориолиса находится поворотом вектора относительной скорости поступательного движения на 90 градусов против угловой скорости переносного движения;
E) при переносном относительном и вращательном поступательном движениях. Величина ускорения Кориолиса равна скалярно-векторному произведению угловой скорости переносного движения на поступательную скорость относительного движения. Направление ускорения Кориолиса находится поворотом вектора относительной скорости поступательного движения на 90 градусов против угловой скорости переносного движения.
$$$0332
Что такое “кинематическая пара ”?
A) неподвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение;
B) подвижное соединение нескольких соприкасающихся звеньев, допускающее их относительное движение;
C) подвижное соединение двух соприкасающихся звеньев, допускающее их переносное движение;
D) подвижное соединение двух соприкасающихся звеньев, допускающее их относительное движение;
E) подвижное соединение нескольких звеньев, допускающее их относительное движение.
$$$0333
Что такое “низшая кинематическая пара”?
A) кинематическая пара, в которой требуемое переносное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
B) кинематическая пара, в которой требуемое вращательное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
C) кинематическая пара, в которой требуемое относительное движение обеспечивается непостоянством контакта ее элементов по плоскости;
D) кинематическая пара, в которой требуемое относительное движение обеспечивается непостоянством контакта ее элементов по поверхности;
E) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости.
$$$0334
Что такое “высшая кинематическая пара”?
A) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по поверхности или плоскости;
B) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по линии или в точке;
C) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по линии;
D) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов в точке;
E) кинематическая пара, в которой требуемое относительное движение обеспечивается постоянством контакта ее элементов по плоскости.
$$$0335
Что такое “кинематическая цепь”?
A) группа звеньев связывающих между собой поступательные кинематические пары;
B) группа звеньев связывающих между собой вращательные кинематические пары;
C) группа звеньев связывающих между собой поступательные и вращательные пары;
D) группа звеньев связывающих между собой кинематические группы;
E) группа звеньев связывающих между собой кинематические пары.
$$$0336
Что такое “замкнутая кинематическая цепь”?
A) положительное смещение имеет место тогда, когда инструментальная рейка пододвигается к оси вращения заготовки;
B) если инструментальную рейку заменить модульной фрезой;
C) если инструментальную рейку заменить червячной фрезой;
D) положительное смещение имеет место тогда, когда инструментальная рейка отодвигается от оси вращения заготовки;
E) если инструментальную рейку заменить долбяком.
$$$0337
Что такое “разомкнутая кинематическая цепь”?
A) кинематическая цепь, в которой имеется хотя бы два звена только одной кинематической пары;
B) кинематическая цепь, в которой имеется хотя бы одно звено только одной кинематической пары;
C) кинематическая цепь, в которой каждое звено связано кинематической парой с двумя другими звеньями;
D) группа звеньев связывающих между собой кинематические пары;
E) кинематическая цепь, в которой каждое звено связано с двумя другими кинематическими цепями.
$$$0338
Что такое план скоростей?
A) чертеж, на котором в определенном масштабе нанесены векторы скоростей основных точек механизма. Цель плана скоростей показать направление действия векторов скоростей точек;
B) чертеж, на котором нанесены векторы скоростей основных точек механизма. Цель плана скоростей показать направление действия векторов скоростей точек, принадлежащих всем звеньям механизма.<17, X>0;
C) чертеж, на котором в определенном масштабе нанесены векторы скоростей основных точек механизма. Цель плана скоростей найти неизвестные скорости характерных точек;
D) чертеж, на котором нанесены векторы относительных скоростей основных точек механизма. Цель плана скоростей показать направление действия векторов скоростей точек, принадлежащих всем звеньям механизма;
E) чертеж, на котором нанесены векторы абсолютных скоростей основных точек механизма. Цель плана скоростей показать направление действия векторов скоростей точек, принадлежащих всем звеньям механизма.
$$$0339
Что такое план ускорений?
A) чертеж, на котором в определенном масштабе нанесены векторы ускорений основных точек механизма. Цель плана ускорений показать направление действия векторов ускорений точек;
B) чертеж, на котором нанесены векторы ускорений основных точек механизма. Цель плана ускорений показать направление действия векторов ускорений точек, принадлежащих всем звеньям механизма;
C) чертеж, на котором в определенном масштабе нанесены векторы ускорений основных точек механизма. Цель плана ускорений найти неизвестные ускорения характерных точек;
D) чертеж, на котором нанесены векторы относительных ускорений основных точек механизма. Цель плана ускорений показать направление действия векторов ускорений точек, принадлежащих всем звеньям механизма;
E) чертеж, на котором нанесены векторы абсолютных ускорений основных точек механизма. Цель плана ускорений показать направление действия векторов ускорений точек, принадлежащих всем звеньям механизма.
$$$0340
Какой из методов кинематического анализа дает наибольшую точность?
A) Графический;
B) Аналитический;
C) Графо-аналитический;
D) Экспериментальный;
E) Другой.
$$$0341
Векторы каких скоростей (ускорений) исходят из полюса плана скоростей (плана ускорений)?
A) Абсолютных скоростей;
B) Относительных скоростей;
C) Абсолютных ускорений;
D) Относительных ускорений;
E) Касательных ускорений.
$$$0342
Как направлен вектор скорости точки А кривошипа ОА при известном направлении его вращения?
A) Параллельно звену ОА к центру вращения;
B) Перпендикулярно к звену ОА в сторону его вращения;
C) Параллельно звену ОА в сторону от центра вращения;
D) Перпендикулярно к звену ОА в сторону, противоположную его вращению;
E) Вокруг ведущего звена.
$$$0343
Как направлено ускорение точки А кривошипа ОА, если его угловая скорость постоянна?
A) Параллельно звену ОА к центру вращения;
B) Перпендикулярно к звену ОА в сторону его вращения;
C) Параллельно звену ОА в сторону от центра вращения;
D) Перпендикулярно к звену ОА в сторону, противоположную его вращению;
E) Вокруг ведущего звена.
$$$0344
Какой вектор на плане скоростей изображает относительную скорость звена АВ?
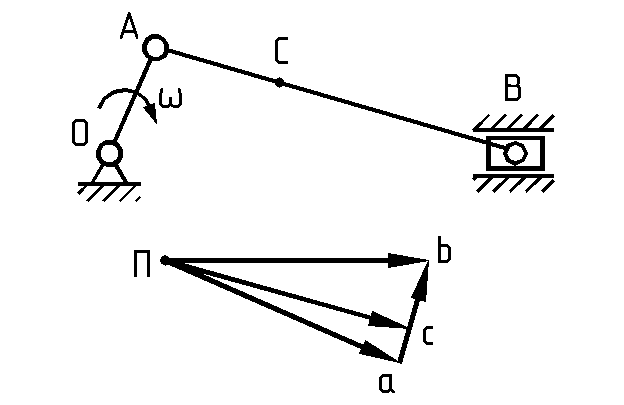
A) Вектор Пa;
B) Вектор Пb;
C) Вектор Пc;
D) Вектор ab;
E) Вектор cb
$$$0345
Какой вектор на плане скоростей изображает скорость точки С звена АВ?
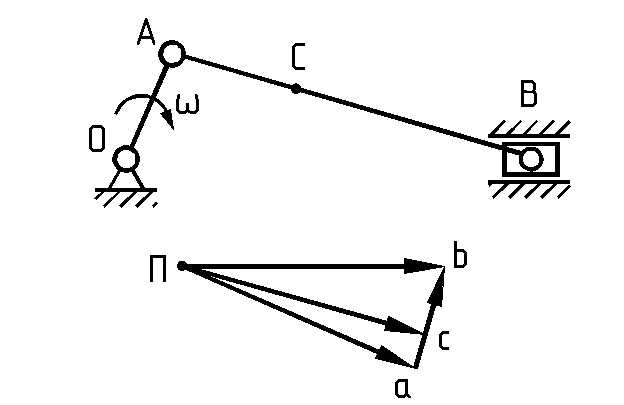
A) Вектор Пa;
B) Вектор Пb;
C) Вектор Пc;
D) Вектор ab;
E) Вектор cb
$$$0346
С помощью какой скорости можно определить угловую скорость звена АВ?
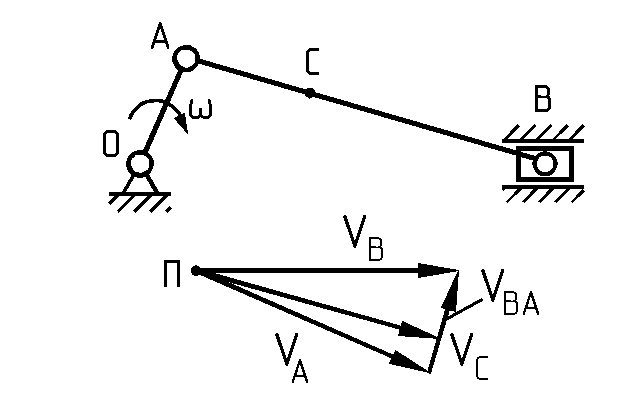
A) Скорость точки А;
B) Скорость точки B;
C) Скорость точки C;
D) Относительная скорость звена АВ;
E) Относительная скорость точки С.
$$$0347
Для какого положения механизма скорость точки А равна скорости точки В?
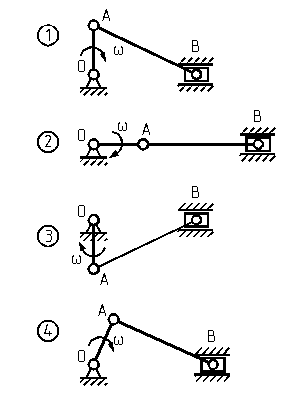
A) Положение 1;
B) Положение 2;
C) Положение 3;
D) Положение 4;
E) Другое положение.
$$$0348
Угловая скорость кривошипа рычажного механизма постоянна. Угловое ускорение какого звена этого механизма будет равно нулю?
A) Шатуна;
B) Коромысла;
C) Кривошипа;
D) Ползуна;
E) Направляющей.
$$$0349
Для какого звена необходимо определять ускорение Кориолиса?
A) Звена, совершающего вращательное движение;
B) Звена, совершающего поступательное движение;
C) Звена, совершающего сложное движение;
D) Звена, совершающего плоскопараллельное движение;
E) Звена, совершающего возвратные движения.
$$$0350
Какое положение является крайним ("мертвым") для центрального кривошипно-шатунного механизма?
A) Положение, в котором скорость ползуна является максимальной;
B) Положение, в котором скорость ползуна является минимальной;
C) Положение, в котором скорость ползуна равна нулю;
D) Положение, в котором скорость ползуна является средней между максимальной и минимальной;
E) Положение, в котором скорость ползуна является равной скорости кривошипа.
$$$0351
Что не входит в задачи кинематического анализа механизмов?
A) Определение положений звеньев и траекторий точек;
B) Определение линейных скоростей и ускорений точек;
C) Определение угловых скоростей и ускорений звеньев;
D) Определение размеров звеньев механизма;
E) Определение внешних сил.
$$$0352
Рычажный механизм состоит из группы начального звена и трех групп Ассура. С какой группы следует начинать кинематический расчет этого механизма?
A) С группы начального звена;
B) С группы Ассура, соединенной с группой начального звена;
C) С группы Ассура, наиболее удаленной от группы начального звена;
D) Порядок расчета не имеет значения;
E) С групп Ассура, содержащих ползун.
$$$0353
Какие параметры подлежат определению при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
A) Координаты внешних кинематических пар;
B) Координаты внутренней кинематической пары;
C) Длины звеньев группы;
D) Угловые положения звеньев;
E) Масса ползуна.
$$$0354
Чем определяется показатель сборки при кинематическом расчете группы Ассура с тремя вращательными парами аналитическим методом?
A) Знаком момента вектора группы относительно внутренней кинематической пары;
B) Знаком углов поворота звеньев;
C) Направлением вектора группы;
D) Знаком угла, определяющего угловое положение вектора группы;
E) Направлением касательного ускорения.
$$$0355
Какие параметры подлежат определению при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
A) Расстояние от начала координат до направляющей;
B) Координаты ползуна;
C) Координаты внешней вращательной пары;
D) Угловое положение шатуна;
E) Угловое положение кривошипа.
$$$0356
Чем определяется показатель сборки при кинематическом расчете группы Ассура с двумя вращательными и внешней поступательной парами аналитическим методом?
A) Знаком угла поворота оси Y до совмещения ее с единичным вектором n;
B) Знаком косинуса угла между осью X' правой системы координат и вектором группы;
C) Знаком угла, определяющего угловое положение шатуна;
D) Знаком расстояния от начала координат до направляющей;
E) Положением ползуна.
$$$0357
Определите класс кинематической пары.
A) 2 класс;
B) 3 класс;
C) 4 класс;
D) 5 класс;
E) 1 класс.
$$$0358
Определите класс кинематической пары.
A) 2 класс;
B) 3 класс;
C) 4 класс;
D) 5 класс;
E) 1 класс.
$$$0359
Определите класс кинематической пары.
A) 2 класс;
B) 3 класс;
C) 4 класс;
D) 5 класс;
E) 1 класс.
$$$0360
Определите класс кинематической пары.
A) 2 класс;
B) 3 класс;
C) 4 класс;
D) 5 класс;
E) 1 класс.