

4. Передаточная функция исполнительного механизма
Мощность от вала двигателя к регулирующему органу передается через редуктор. Редуктор выбирается из стандартного ряда редукторов. В маломощном приводе КПД не является определяющим, поэтому главное при выборе редуктора – его передаточное число.
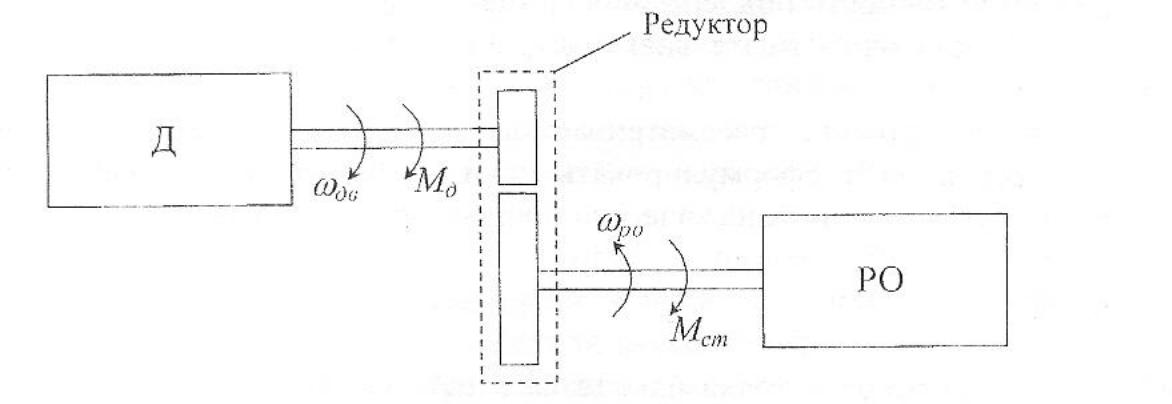
Рис.4. Схема исполнительного механизма
Расчет передаточного числа редуктора i выполняется по формуле

где
nдв
– номинальная
частота вращения двигателя,
 .
.
Величина скорости nро определяется из следующих соображений:
предположим, что по требованиям технологического процесса время
регулирования известно и равно tпп. Предположим также, что регулирующим
органом является перекрывной вентиль, обеспечивающий регулирование
расхода жидкости в емкость. Для выбора вентилей также имеется справочная
литература. Пусть для полного открытия вентиля (исходное положение –
вентиль закрыт) требуется сделать 10 – 15 оборотов. В процессе же регулиро-
вания в течение времени переходного процесса tпп целесообразно изменять
положение вентиля примерно на угол, соответствующий 3 – 4 оборотам. Это
объясняется тем, что при регулировании расход жидкости через вентиль не
должен сильно изменяться. Можно принять, что максимальное изменение
регулируемой величины (в заданном примере расхода жидкости) не должно
превышать 20 %.
Далее можно определить величину максимальной скорости вращения
вентиля (исполнительной оси регулирующего органа)
Величина максимальной скорости вращения вентиля равно:
 ,
,
где m – количество оборотов регулирующего органа, в данном случае m = 3 ÷ 4 оборотам. Коэффициент передачи редуктора как элемента САР рассчитывается по формуле

Редуктор выбирается из стандартного ряда редукторов. В маломощном
приводе к.п.д. не является определяющим, поэтому главное при выборе
редуктора его передаточное число.
Остальные элементы системы (датчики, при необходимости
корректирующие элементы) выбираются по справочникам и каталогам.
5. Передаточная функция регулирующего органа (вентиль).
Регулирующим органом в данном задании служит вентиль. Предполагая его статическую характеристику линейной, передаточную функцию для него можно представить в виде коэффициента передачи
 где
f1max
-
максимальное проходное сечение вентиля;
где
f1max
-
максимальное проходное сечение вентиля;
φmax - угол поворота вала, при котором происходит полное открытие или закрытие вентиля.
6. Передаточная функция Объекта Управления.
Вывод передаточной функции для рабочей ёмкости, в
которой регулируется уровень жидкости.
Предварительно получим дифференциальное уравнение для рабочей
емкости и затем выражение для передаточной функции.
Регулируемая величина − уровень жидкости в емкости h1, регулирующее
воздействие − изменение проходного сечения вентиля f1, возмущающие
воздействия − изменения h0, G, m1 и m2.
Основными уравнениями, описывающими изменение уровня жидкости в
емкости, являются:
Уравнение материального баланса
 (1)
(1)
где ΔV- приращение объема жидкости в емкости за время Δt ;
 -
объемная подача жидкости в рабочую
емкость в единицу времени;
-
объемная подача жидкости в рабочую
емкость в единицу времени;
 -
объемный унос жидкости из рабочей
емкости в единицу времени;
-
объемный унос жидкости из рабочей
емкости в единицу времени;
При вертикальных стенках емкости
 (2)
(2)
где S– площадь «зеркала» жидкости;
Δh1 - приращение уровня жидкости за время .
Подставляя (1) в (2) и переходя к бесконечно малым приращениям dh1 и
d t,
получим
t,
получим
(3)
Уравнение расхода при истечении жидкости через вентиль f1
( 4)
4)
где f1 – площадь проходного сечения вентиля, м2;
ε - коэффициент расхода, учитывающий влияние местных сопротивлений в данной работе ε = 0,60 - 0,65;
g – ускорение силы тяжести;
Δh = h0 – h1 – перепад уровней жидкости в емкостях.
3. Уравнение уноса жидкости тканью из рабочей емкости
 (5)
(5)
где G – массовый расход ткани, г/с;
ρ – плотность жидкости, г/л;
 m1,
m2
–
абсолютная влажность ткани соответственно
на входе и выходе плюсовки, г/г;
m1,
m2
–
абсолютная влажность ткани соответственно
на входе и выходе плюсовки, г/г;
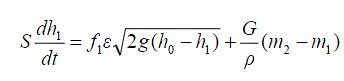
Подставляя (5) и (4) в (3), получим уравнение объекта регулирования
(6)
Здесь регулируемая величина – h1, регулирующее воздействие –
изменение f1, возмущающие воздействия – изменение h0, G, m1, m2.
Уравнение (6) нелинейное. Выполним его линеаризацию.
Запишем уравнение (6) в следующем виде
Р азложим
функцию F
в
ряд Тейлора по отклонениям переменных
азложим
функцию F
в
ряд Тейлора по отклонениям переменных
величин от номинального режима:
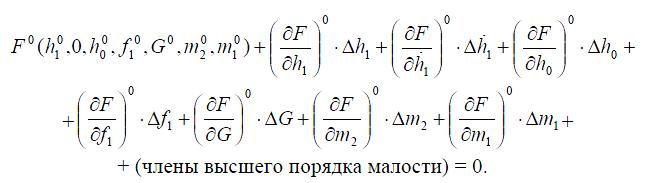
Вычтем из этого уравнения выражение для установившегося движения F0,
и, пренебрегая малыми величинами высшего порядка, получим
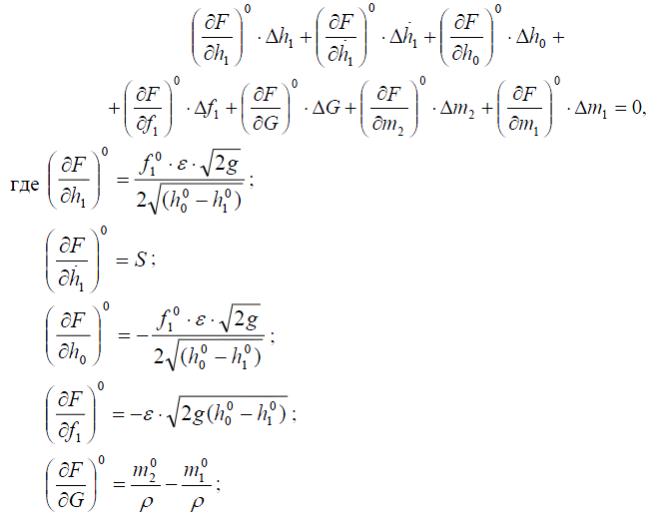
Таким образом, линеаризованное дифференциальное уравнение (6) в
отклонениях запишется:
 (7)
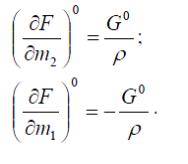
Введем обозначения:
(7)
Введем обозначения:
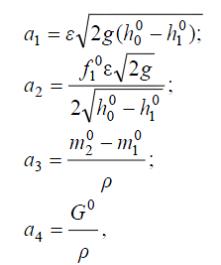
где
,
,
 ,
,
,
G0–
значения соответствующих параметров
при номинальном режиме работы системы,
кроме того, для малых отклонений Δh1,
Δf1,
Δh0,
ΔG,
Δm2
и Δm1
примем
обозначения h1,
f1,
m1,
m2,
G.
,
,
,
G0–
значения соответствующих параметров
при номинальном режиме работы системы,
кроме того, для малых отклонений Δh1,
Δf1,
Δh0,
ΔG,
Δm2
и Δm1
примем
обозначения h1,
f1,
m1,
m2,
G.
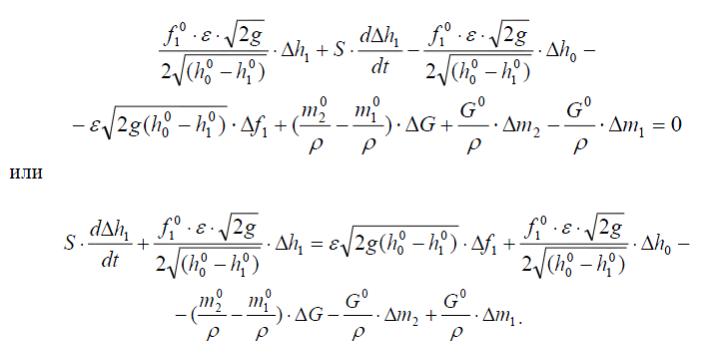
С учетом обозначений уравнение (7) принимает вид
 (8)
(8)
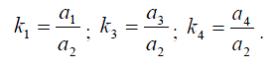
Приведя уравнение (8) к стандартному виду (разделив правую и левую
части на a2), получим
 (9)
(9)
Здесь T0 = S/a2 – постоянная времени объекта;
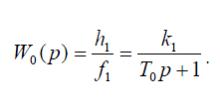
Уравнение (9) позволяет записать передаточную функцию для рабочей ёмкости
Все параметры, необходимые для вычисления постоянной времени и
к оэффициентов
передачи объекта, приведены в задании.
Не указано лишь номинальное сечение
вентиля , которое необходимо определить
из уравнения равновесного режима:
оэффициентов
передачи объекта, приведены в задании.
Не указано лишь номинальное сечение
вентиля , которое необходимо определить
из уравнения равновесного режима:
и ли
ли