

Министерство образования Российской Федерации ФГБОУ ВПО
«Санкт–Петербургский государственный университет
технологии и дизайна»
Кафедра
автоматизации производственных процессов
Курсовая работа по дисциплине:
Теория автоматического управления
на тему:
«Обработка и представление результатов однократных измерений при наличии систематической погрешности»
Выполнил студент Гр. 3-МД-6:
Логинов В.В.
Проверил преподаватель:
Энтин В.Я.
Санкт–Петербург
2013
Содержание
1. Задание для курсового проектирования…………………………………….....………...3
2.Передаточные функции звеньев регулятора…………………………………………….5
3. Получение уравнения движения САР…………………………………………………..16
4. Синтез САР на ЭВМ с применением метода эффективных полюсов и нулей……....19
5. Основные положения метода эффективных полюсов и нулей ……………………....20
6. Расчет границ рабочей области…………………..……………………………………..22
7. Расчёт и построение рабочей области в системе MATLAB.………..……….…….…27
8. Расчет переходного процесса с помощью решателей системы MATLAB.………….32
9. Принципиальная схема сар………………………………………………….……..….36 Заключение……………………………………………………………………………….
Список использованной литературы………………………………………………….....
I. Задание для курсового проектирования
Выполнить расчет системы автоматического регулирования уровня жидкости в гидравлической емкости методом эффективных полюсов и нулей. Разработать программу для решения задачи синтеза САР на ЭВМ.
Объектом регулирования является рабочая емкость, в которой должен поддерживаться постоянный уровень жидкости h1.
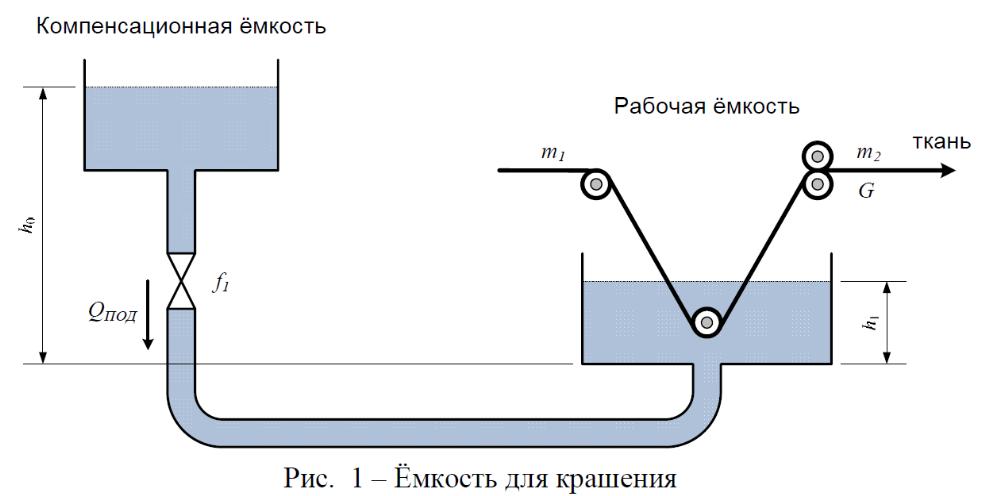
На рис. 1 изображены рабочая и компенсационная емкости и схема прохождения окрашивания ткани.
Объектом регулирования является рабочая емкость, в которой должен поддерживаться постоянный уровень жидкости h1 (рис.1).
Примером такого объекта может служить плюсовка машины «прерывного крашения тканей, в которой должен поддерживаться постоянный уровень красильного раствора, что обеспечивает стабильность пропитки ткани этим раствором и способствует достижению равномерной окраски ткани по длине.
Унос красильного раствора из плюсовки движущейся тканью с массовым расходом G, г/с, обусловлен разницей абсолютной влажности ткани на выходе из плюсовки m2 и на входе в плюсовку m1. Унос раствора тканью должен компенсироваться подачей подкрепляющего раствора (Qпод) из бака через клапан с проходным сечением f1. Этот клапан играет роль регулирующего органа.
Факторами, вызывающими изменение регулируемой величины h1 и играющими роль возмущающих воздействий, могут быть изменения: уровня ho в баке хранения подкрепляющего раствора, влажностей ткани m2 и m1, массового расхода ткани G.
Другими параметрами рабочей емкости (плюсовки) являются площадь зеркала жидкости S, плотность красильного раствора р.
Исходные данные:
Параметры гидравлической емкости для номинального режима
Параметр |
|
|
S, м |
G0 г/с |
|
|
ρ, г/л |
Вариант №5 |
4,4 |
0,25 |
0,3 |
340 |
1 |
0,12 |
1000 |
 ,
м
,
м ,
м
,
м ,
г/г
,
г/г ,г/г
,г/г
Требования к процессу регулирования
Показатель качества |
Время переходного процесса —
|
Точность
регулирования —
|
Перерегулирование - σ , % |
Затухание за период - ψ , % |
Вариант №5 |
15 |
3 ÷ 5 |
25 |
70 ÷ 75 |
 ,
с
,
с
Данные характеристики регулирующего органа
Характеристика |
Fmax |
φmax, об |
Вариант №5 |
3 |
14 |
