

4.2. Анализ фундаментальных свойств уоу.
4.2.1. Определение характеристического полинома и спектра системной матрицы, оценка устойчивости.
Xpkoeff=poly(A)
Характеристический полином:
W(p)=p4+18p3+298p2+948p+262
spektr=eig(A)
Корни:
-7.4183 +13.4569i
-7.4183 -13.4569i
-0.3050
-3.6384
Объект является устойчивым, т.к. корни имеют отрицательные вещественные части.
4.2.2. Оценка управляемости, наблюдаемости и полноты уоу.
Матрица управляемости:

Матрица наблюдаемости:

![]()
![]()
![]()
Ранги матриц равны между собой, следовательно, объект является полностью управляемым и наблюдаемым.
4.2.3. Преобразование мв мм уоу к различным базисам.
Основная нормальная (ОН) форма:


![]()
Транспонированная основная нормальная (ТОН) форма:


![]()
4.3.Синтез динамического наблюдателя состояний.
Синтезируем наблюдатель Калмана для объекта, заданного матрицами в ОН форме::
Выписываем ХП по последней строке АОН: p4+18.8p3+295.7p2+947.6p+262=0
Корни ХП: p1=-7+13.4j, p2=-7-13.4j, p3=3.64, p4=0.3.
Выбираем чмсла левее меньшего корня: p1=-8, p2=-8.5, p3=-9, p4=-9.5.
ХПнабл=(p-p1) (p-p2) (p-p3) (p-p4)
ХПнабл : p4+35p3+458,75p2+2668,75p+5814=0
 ;
;
 ;
;
Система уравнений для наблюдателя:
 ;
;


Рисунок 4.3 – Структурная схема объекта с наблюдателем.

Рисунок 4.4 – Переходный процесс по ошибке (y-yн)
4.4. Реализация модального управления уоу.
Построение системы модального управления для объекта вида:
 ;
;
 ;
;
N(p): p4+35p3+459p2+2669p+5814=0
Корни ХП: p1=-10+1.6j, p2=-10-1.6j, p3=-7+1.1j, p4=-7-1.1j.
Выбираем чмсла левее меньшего корня: p1=-10.5, p2=-11, p3=-11.5, p4=-12.
Nc(p)=p4+45p3+759p2+5681p+15939=0








Рисунок 4.5 – Структурная схема модального управления объекта.
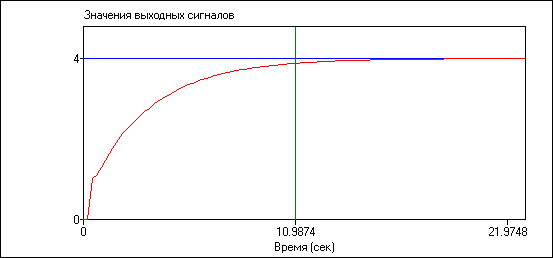
Рисунок 4.6 – Переходный процесс системы.

Рисунок 4.7 – ЛАЧХ и ЛФЧХ системы.
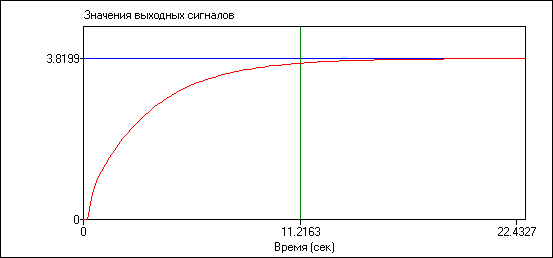
Рисунок 4.8 – Переходный процесс X1Н.
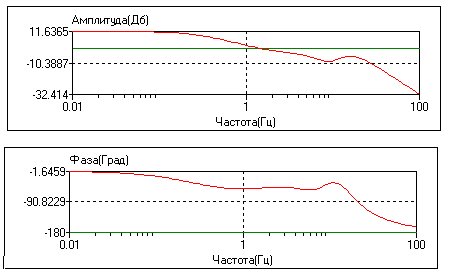
Рисунок 4.8 – ЛАЧХ и ЛЧФХ X1Н.

Рисунок 4.9 – Переходный процесс X2Н.

Рисунок 4.9 – ЛАЧХ и ЛЧФХ X2Н.
Заключение.
В ходе расчётной работы был исследован объект управления по двум входам: получены графики переходных процессов, ЛАЧХ и ЛФЧХ. Была улучшена устойчивость системы с помощью ПД регулятора.
Так же ММ ОУ была преобразована в матрично-векторную форму, по которой можно сказать, что объект является наблюдаемым и управляемым. Был синтезирован динамический наблюдатель состояний и реализовано модальное управление УОУ. По построенным переходным процессам и графикам ЛАЧХ и ЛЧФХ системы и переменных состояний можно сделать вывод, что ошибка стремится к нулю, система является устойчивой.