

Полюсы(×):
№ Значения
1 -90.0484061442002+0i
2 -14.2857142857143+0i
3 -3.20913026123325+3.22707597784045i
4 -3.20913026123325-3.22707597784045i
5 -2.85714285714286+0i

Рисунок 2.5 – Расположение нулей и полюсов
Коэффициенты числителя: Коэффициенты знаменателя
Т1 = 1/26.16= 0,038 Т1 = 1/90.05= 0,011
Т2 = 1/6.67=0.15 Т2 = 1/14.28=0.07
Т3 = 1/3.97=0.25 Т3 = 1/2.85=0.35
Т42 = 1/(3.21 2+3.23 2) = 0.048
= 3.21 /(3.21 2+3.23 2) 0,5 = 0.71
Запишем передаточную функцию в канонической последовательно-структурированной форме записи в виде произведения элементарных полиномов.

Оценка свойств объекта:
Объект является устойчивым, т.к. его характеристический полином не имеет нулевых корней.
Коэффициент усиления равен 0.094;
Порядок астатизма равен 0;
Колебательность = 0.71;
2.2 Получение и исследование динамических и частотный характеристик УОУ.
Канал входа u1.
Первый канал входа
Частотные характеристики:

Рисунок 2.6 – ЛАЧХ

Рисунок 2.7 – ЛФЧХ

Рисунок 2.8– ВЧХ

Рисунок 2.9– МЧ

Рисунок 2.10– АФЧХ.
Второй канал входа u1.
Частотные характеристики:

Рисунок 2.11 – ЛАЧХ.

Рисунок 2.12 – ЛФЧХ.

Рисунок 2.13 – ВЧХ.

Рисунок 2.14 – МЧХ.

Рисунок 2.15 – АФЧХ.
3. Исследование возможностей и простейших вариантов управления объектом.


Передаточная функция 4-го порядка, астатизм 2-го порядка.
Частотные характеристики и переходный процесс объекта управления:

Рисунок 3.1 – ЛАЧХ и ЛФЧХ .

Рисунок 3.2 – Переходный процесс.
Оценка возможностей статического управления объектом.
3.1 ПД-закон регулирования
Wпд(p)=Kр+Тд(р).
Методика исследования сводится к оценке значений настроек Kр и Тд, обеспечивающих требуемые запасы устойчивости.
Определим расчетное значение величины Тд. Полагая, что начальное значение Кр = 1, то величину Тд определяют из соотношения:

Далее
 - значение частоты, при котором фазовая
характеристика объекта управления
(рис. 3.1) опускается ниже ординаты ``-π``
на 10 угловых градусов.
- значение частоты, при котором фазовая
характеристика объекта управления
(рис. 3.1) опускается ниже ординаты ``-π``
на 10 угловых градусов.

Строим ЛАЧХ и ЛФЧХ с ПД-регулятором. Значение Т=14.3
Вводим полученное значение в передаточную функцию регулятора и определяем запасы устойчивости по ЛАЧХ и ЛФЧХ.

Рисунок 3.3 -ЛАЧХ и ЛФЧХ разомкнутой САУ с ПД-регулятором
Запас устойчивости по амплитуде равен бесконечности, а запас устойчивости по фазе - 2 градуса.
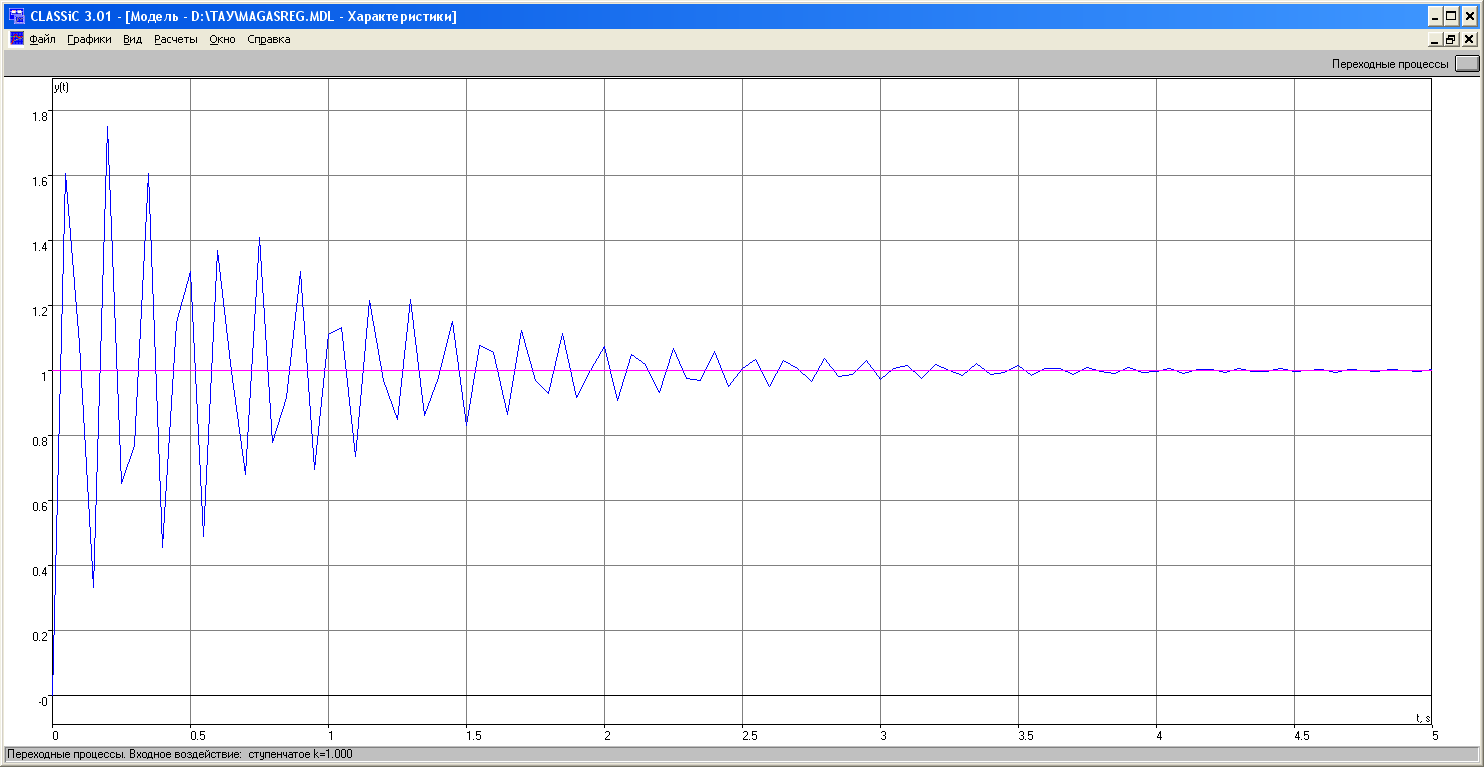
Рисунок 3.4 – Переходной процесс объекта управления с ПД- регулятором
4. Анализ фундаментальных свойств объекта в мв форме описания.
4.1. Преобразование мм оу в матрично-векторную форму описания.
Рисунок 4.1 – Структурная схема объекта управления по второму входу.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Представим каждый элемент схемы через элементарные звенья.


Рисунок 4.2 – Структурная схема объекта, выраженная через элементарные звенья.
Общий вид МВ ММ:




![]()