

2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ И ИССЛЕДОВАНИЕ 1
УСЛОВНОГО ОБЪЕКТА УПРАВЛЕНИЯ……………………………….5 1
4.2.1. Определение характеристического полинома и спектра 1
системной матрицы, оценка устойчивости………………………………….19 1
2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ И ИССЛЕДОВАНИЕ УСЛОВНОГО ОБЪЕКТА УПРАВЛЕНИЯ. 4
Нули(+): 5
Полюсы(×): 5
Нули(+): 7
Полюсы(×): 7
4.2. Анализ фундаментальных свойств уоу. 20
4.2.1. Определение характеристического полинома и спектра системной матрицы, оценка устойчивости. 20
4.3.Синтез динамического наблюдателя состояний. 21
Содержание.
Введение……………………………………………………………………2
1. ВЫБОР ВАРИАНТА……………………………………………………3
2. Математическое описание и исследование условного объекта управления……………………………….5
2.1 Получение ПФ по каналам внешних воздействий……………………5
2.2 Получение и исследование динамических и частотный
характеристик УОУ…………………………………………………………9
3. ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ И ПРОСТЕЙШИХ
ВАРИАНТОВ УПРАВЛЕНИЯ ОБЪЕКТОМ………………………………13
3.1 ПД-закон регулирования…………………………….………………….15
4. АНАЛИЗ ФУНДАМЕНТАЛЬНЫХ СВОЙСТВ ОБЪЕКТА
В МВ ФОРМЕ ОПИСАНИЯ…………………………………………………17
4.1. Преобразование ММ ОУ в матрично-векторную форму описания…..17
4.2. Анализ фундаментальных свойств УОУ……………………………….19
4.2.1. Определение характеристического полинома и спектра системной матрицы, оценка устойчивости………………………………….19
4.2.2. Оценка управляемости, наблюдаемости и полноты УОУ……………19
4.2.3. Преобразование МВ ММ УОУ к различным базисам………………..20
4.3.Синтез динамического наблюдателя состояний…………………………20
4.4. Реализация модального управления УОУ……………………………….22
Заключение……………………………………………………………………..25
1. Выбор варианта.
Исходными материалами КР являются структурная схема условного объекта управления (УОУ) и математические модели структурных звеньев этой схемы. Выбор индивидуального варианта этих данных осуществляется с использованием обобщённой структурной схемы.
Вариант №101.
В соответствии с этим номером по указанным в таблицам выбираются передаточные функции обобщённой структурной схемы и их параметры (коэффициенты).
j=101-72*1=29
 ;
;
 ;
;
 ;
;
 ;
;

i=105-4*26=1
Возмущающее
воздействие –
 .
.
 ;
; ;
;
j=101-14*7=3
 ;
; ;
;
 ;
;
 .
.
j=101-13*7=10
к0=0,23; к1=7,8; к2=0,73; к3=4,8; к4=0,18;
к5=3,2; к6=0,27; к7=1,9; к8=0,54; к9=6,1.
Ti=Tiтабл* к0, j=101-17*5=16;
T2=8,3 *0,23=1,91; T3=0,16 *0,23=0,04; T4=1,5 *0,23=0,35;
T6=3,7*0,23=0,85; T7=0,32*0,23=0,07; T9=0,65*0,23=0,15.
 ;
;
 ;
;
 ;
;
 ;
;
;
;
 ;
;
 ;
;
 ;
;
 .
.

Рисунок 1 - Общая схема
2. Математическое описание и исследование условного объекта управления.
2.1 Получение пф по каналам внешних воздействий.
 Рисунок 2.1 - Структурная схема объекта
управления
Рисунок 2.1 - Структурная схема объекта
управления

Рисунок 2.2 - Структурная схема объекта управления по первому каналу входа u1.
Эквивалентная передаточная функция по каналу входа u1:

Преобразуем эту передаточную функцию в каноническую форму записи:

Полученная передаточная функция имеет 5-й порядок и обладает астатизмом 1-го порядка.
Найдем корни числителя и знаменателя передаточной функции.
Нули(+):
№ Значения
1 -26.7315639188169+0i
2 -7.21704342462131+0i
3 -3.35774237955113+0i
4 -0.637674153244011+0i
Полюсы(×):
№ Значения
1 -90.0484061442002+0i
2 -14.2857142857143+0i
3 -3.20913026123324+3.22707597784046i
4 -3.20913026123324-3.22707597784046i
5 -2.85714285714285+0i
6 0+0i

Рисунок 2.3 – Расположение нулей и полюсов
Коэффициенты числителя: Коэффициенты знаменателя
Т1 = 1/26.73 = 0,037 Т1 = 1/90.05= 0,011
Т2 = 1/7.22=0.13 Т2 = 1/14.28=0.07
Т3 = 1/3.36=0.29 Т3 = 1/2.86 = 0.35
Т4 = 1/0.64=1.56 Т42 = 1/(3.21 2+3.23 2) = 0.048
= 3.21 /(3.21 2+3.23 2) 0,5 = 0.71
Запишем передаточную функцию в канонической последовательно-структурированной форме записи в виде произведения элементарных полиномов.

Оценка свойств объекта:
Объект является неустойчивым, т.к. его характеристический полином имеет нулевой корень.
Коэффициент усиления равен 0.446;
Порядок астатизма равен 1;
Колебательность = 0.71;
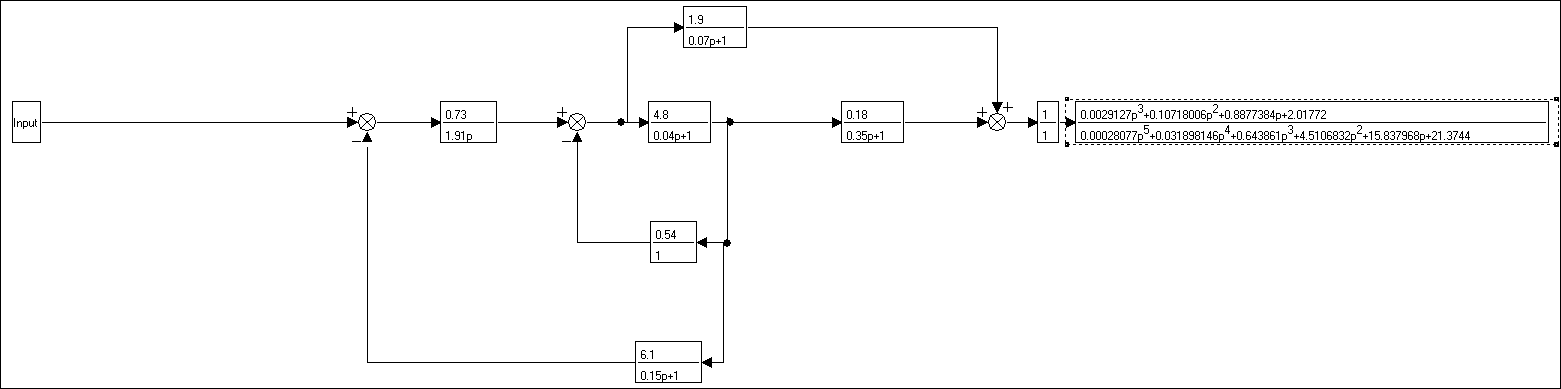
Рисунок 2.4 – Структурная схема объекта управления по первому каналу входа u1.
Эквивалентная передаточная функция по каналу входа u1:

Преобразуем эту передаточную функцию в каноническую форму записи:

Полученная передаточная функция имеет 5-й порядок и не обладает астатизмом.
Найдем корни числителя и знаменателя передаточной функции.
Нули(+):
№ Значения
1 -26.1585154674398+0i
2 -6.66666666666667+0i
3 -3.97231160022936+0i