

Раздел 5. Электрические машины.
Тема 5.1. Датчики момента.
Вопросы: конструктивные схемы, основные расчетные соотношения, схемы включения.
Общая характеристика датчиков момента.
Датчиками момента или моментными датчиками называют электромеханические преобразователи, входной величиной которых является электрическое напряжение или ток, а выходной – механический момент.
От электрических двигателей ДМ отличаются лишь тем, что работают в заторможенном режиме, т. е. при нулевой или очень малой скорости поворота ротора относительно статора.
Можно отметить три основные области использования ДМ:
использование в качестве исполнительных элементов систем коррекции гироскопа,
использование в качестве исполнительных элементов систем начального приведения оси гироскопа в заданное положение,
использование в измерительных гироприборах типа гиротахометров, гиротахоакселерометров и т. п. в случае, когда схемы приборов предусматривают компенсационный метод измерения гироскопического момента.
В зависимости от требований, предъявляемых к ДМ они разделяются на две группы:
ДМ, используемые в системах начального приведения, а также в системах коррекции от какого-либо позиционного корректирующего устройства, когда коррекция производится непрерывно, а её система является замкнутой.
В системах коррекции, не имеющих обратной связи (разомкнутые), в системах коррекции от изодромных запоминающих устройств - в таких системах коррекция осуществляется по замкнутой схеме непрерывно, а периодически в течение непродолжительного времени; в системах программного управления угловыми координатами подвижных объектов, когда введение программы осуществляется изменением пространственного положения оси гироскопа, являющегося индикаторам рассогласования системы автоматического управления; в измерительных приборах типа гиротахометров, гиротахоакселерометров, демпфирующих гироскопов, когда применяется уравновешивание гироскопического момента моментом электрической пружины.
ДМ первой группы называются грубыми, а второй группы – точными.
Общие требования к ДМ.
возможность реверсирования ДМ,
симметричность характеристики преобразования, т.е. одинаковость величины момента при реверсировании датчика,
экономичность, т.е. возможно больший момент на единицу потребляемой мощности,
отсутствие нулевого момента,
минимум момента трения,
возможно меньшее число токоподводов,
малые габариты и вес,
способность работать в сложных климатических условиях.
Электромагнитные дм.
Вводные замечания. Электромагнитный ДМ состоит из сердечника, якоря и катушки. Сердечник и якорь выполняют конструкционной или кремнистой стали, а также из железа Армко. В случае, когда ДМ работает на переменном токе, применяют листовую электротехническую сталь, пермаллой, а также сталь марки ХВП. По конструктивному исполнению различают: ДМ с повторным якорем, ДМ клапанного типа и соленоидного типа (рис.1)
Рис. 1. Конструктивные схемы электромагнитных ДМ.
На рис. 1. Схемы б) и в) используются во вспомогательных механизмах, например, в арретирующих устройствах, механизмах включения муфт и т.п.
Вращающий момент.
При инженерных расчетах потоками рассеяния можно пренебречь и уравнение вращающего момента записать в виде:

где: i – ток, протекающий через обмотку Э.М.
L0 – коэффициент самоиндукции, вычисленный по магнитному потоку в воздушном зазоре,
θ – угол поворота якоря Э.М.
При насыщенной системе магнитное сопротивление воздушного зазора обычно значительно больше магнитного сопротивления сердечника и якоря. Пренебрегая сопротивление железа, имеем:

где:
 - число витков катушки,
- число витков катушки,
 -
проводимость воздушного зазора.
-
проводимость воздушного зазора.
Подставим (2) в (1):

Если Э.М. питается постоянным током, то величина тока определяется напряжением, подаваемым на обмотку и сопротивлением обмотки, но не зависит от угла поворота якоря, т.е.:

Если величину момента мерить в (г. См), то

При питании Э.М. переменным током и при неизменной величине напряжения, сила тока в обмотке зависит от угла поворота якоря.
Если пренебречь потерями энергии в магнитопроводе и омическим падением напряжения в обмотке, то:

где: U – подведенное напряжение (эффективное),
Е – э.д.с. в обмотке,
f – частота питающего напряжения,
Фmax – амплитуда магнитного потока, связанного с обмоткой.
С другой стороны, если пренебречь, как и ранее, магнитным сопротивлением сердечника и якоря, то:

где Уmax – амплитудное значение тока в обмотке.
Исключим из (6) и (7) значение Фmax и получим:

Подставим значение L0 и Уmax в формулу (3) и выполнив преобразования, найдем, что амплитудное значение электромагнитного момента выражается:

Т.к. U = Umax·sin t, то во времени:

Таким образом, корректирующий момент имеет постоянную и переменную составляющие. Наличие переменной составляющей благоприятно влияет на работу всей системы.
Значение проводимости воздушного зазора , а следовательно, и величина момента существенно зависят от профиля якоря.
В простейшем случае профиль якоря очерчен по дуге окружности (рис.2).
В этом случае:

При питании постоянным током будем иметь:


Рис.2. Профиль якоря.
При питании переменным током:

В обоих случаях момент обращается в нуль при совпадении оси якоря с осью полюсов.
Данный профиль обеспечивает работу в области малых углов θ не превышающих θ0.
Если требуется большой угол, тогда нужно профиль очертить по спирали, гиперболе и т.п.
В
этом случае удается получить значения
углов θ до 120 150°.
150°.
1.2. Конструктивные разновидности Д.М. с поворотным якорем.
Конструктивные схемы ДМ приведены на рис.3.
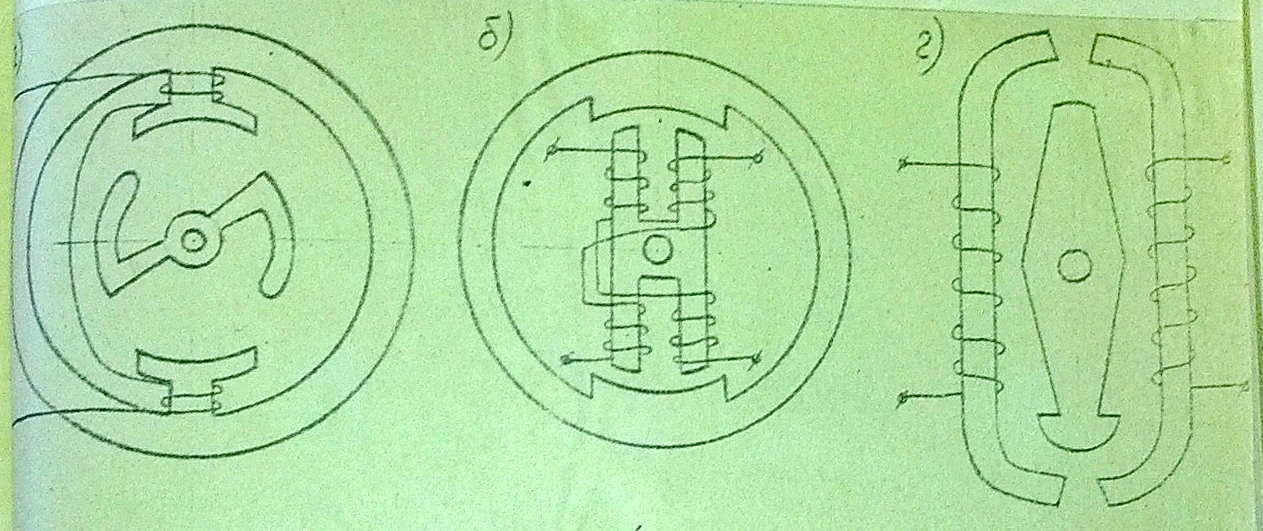
Рис. 3. Варианты конструктивных схем электромагнитных ДМ.
Схема а) применяется с целью уменьшения веса якоря. На оси гироприбора устанавливают два подобных ДМ, каждый из которых создает момент определенного знака.
В схеме б) использована Н-образная форма якоря.
В зависимости от того, в какую пару из двух последовательно соединенных обмоток подается ток, электромагнит развивает момент того или иного знака.
Недостатки
этих схем: малый угол поворота и большой
вес
подвижных элементов. Максимальный
угол поворота порядка 10°.
10°.
Катушки датчика по схеме г) могут быть включены дифференциально (рис.4).

Рис.4. Дифференциальная схема включения (движок потенциометрического ДУ связан с ЧЭ гироприбора).