

3 Айнымалы ток электржетегі
3.1 Синхронды қозғалтқыш негізіндегі электр жетегі
Синхронды қозғалтқыштар осыдан біраз уақытқа дейін салыстырмалы түрде сирек – бастысы, жылдамдық реттеуді талап етпейтін қуатты қондырғыларда қолданылды. Соңғы жылдары жағдай күрт өзгерді: қазіргі заманғы материалдар (тұрақты магниттер), басқару құралдары (салыстырмалы үлкен токтар мен кернеулерге арналған кілттер) есебінен синхронды қозғалтқыштары бар электр жетегінің түрі өзгеріп, бірқатар техникалық салаларда – станок тұрғызу, робот техникасы, икемді өндірістік жүйелерде орын алды.
Машина элементтерінің бірі (статоры) қозғаушы магнит өрісін тудыру үшін қолданылады және бұл мағынада асинхронды машинаның сәйкес элементіне өте ұқсас; басқа элементі (роторы) тұрақты кернеу көзінен сақиналары мен щеткалары арқылы қоректенетін айқындалған немесе айқындалмаған полюсті электр магниті, немесе тұрақты магниттердің конструкциясы түрінде орындалған. Қозғалмалы элементі магнит өрісімен айналады, онымен синхронды қозғалады.
Айқындалмаған полюсті (рn=1) синхронды машинаның статорының фазасына, егер ораманың активті кедергісін есптемегенде, 3.1а суретіне сәйкес қарапайым орын басу сұлбасын құруға болады: қоректендіру көзінің э.қ.к – сі (синусоидалы кернеу U) айналып тұратын магнитпен – ротормен қозғалмайтын орамада пайда болатын э.қ.к – мен Е теңеледі және реактивті кедергімен Х бірге токты I анықтайды. Көрсетілген процестерді сипаттайтын векторлық диаграмма 3.1б суретінде көрсетілген.
Синхронды машина үшін U және Е, немесе сол сияқты статор мен ротор остері арасындағы бұрышы өте маңызды. Бұл бұрыш «магниттік серіппенің» созылу дәрежесін сипаттайды. Электрлік және механикалық шамалар арасындағы негізгі арақатынастарды келесі формуланы:
![]() (3.1)
(3.1)
және 3.1б суретіндегі векторлық диаграмманы қолдана отырып табамыз:
![]()
Көмекші АВС үшбұрышынан анықтаймыз:
![]()
яғни:
![]()
және соңында табамыз:
![]() (3.2)
(3.2)
3.1 суретте синхронды машинаның қарапайым орын басу сұлбасы, векторлық диаграммасы және сипаттамалары келтірілген.
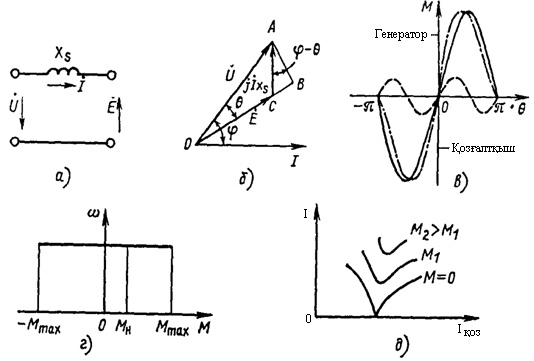
3.1-сурет
Сонымен, синхронды машинаның электр магниттік иін күші бұрышына тәуелді, бұрышының аз мәндері үшін:
![]() (3.3)
(3.3)
Кернеуі мен жиілігі тұрақты кезінде максималды иін күші Мтах э.қ.к – ге Е пропорционал, яғни сызықтық шамамен машинаның қоздыру тогына пропорционал; қалыпты машиналар үшін Мтах /Мн=22,5. Егер машинаның айқындалған полюсті роторы бар болса, онда (3.1.2) формуласы бойынша анықталған (3.1в суреті) иін күшке тағы бірі - sin2 мәніне (3.1в суретіндегі үзік сызық) пропорционал реактивті құраушысы қосылады. Синхронды машинасы иін күшінің сипаттамасының жалпы түрі 3.1в суретінде (үзік нүктелі сызық), механикалық сипаттамасы 3.1г суретінде көрсетілген.
Синхронды машинаның V – түріндегі қисықтар (3.1д суреті) деп аталатын статор тогының I қоздыру тогына Iқоз тәуелділігі бар. Олардың табиғаты қоздыру тогы өзгерген кезде статор тогының реактивті құраушысының және оның таңбасының өзгеруімен түсіндіріледі.
Синхронды машинаның реактивті қуатын және оның таңбасын өзгерту қасиеті энергетикалық түрде өте қызықты болады: ол Mc = 0 кезінде жақсы басқарылатын арнайы реактивті қуаттың конденсаторы болып және таңдау кезінде, механизмнің қозғалуының басты функциясынан басқа тағы бір функциясын – қоректендіру желісінің режимін рационалды пайдаланатын электр жетегінің элементі болып қолданыла алады. (3.1.3) формуладан анықталғандай, аз бұрышы кезінде динамикада синхронды машина икемді элементке тура сәйкес келеді. Шынында да, бұрышы ω0, жылдамдығымен айналатын өріс осі мен ω жылдамдығы бар ротор осі арасындағы бұрыш болғандықтан, (3.1.3) формуласының дифференциалын анықтаймыз:
![]() (3.4)
(3.4)
мұнда: сэм коэффициенті – «магниттік серіппенің» қатаңдығы, екі массалы механикалық жүйеде орын алатын механикалық байланыстың қатаңдығына ұқсас.
Алынған нәтижелерге сүйене отырып, синхронды машинаның тербелуге өте жақын екенін байқаймыз және оның мұндай қасиеті жақсы емес екенін білеміз. Сондықтанүлкен синхронды машиналар асинхронды қозғалтқыштың торлы орамасына ұқсас арнайы демпферлі құрылғылармен жабдықталады және олар иін күштің асинхронды құраушысын қамтамасыз етеді:
![]() (3.5)
(3.5)
Д
3.3-сурет
3.4-сурет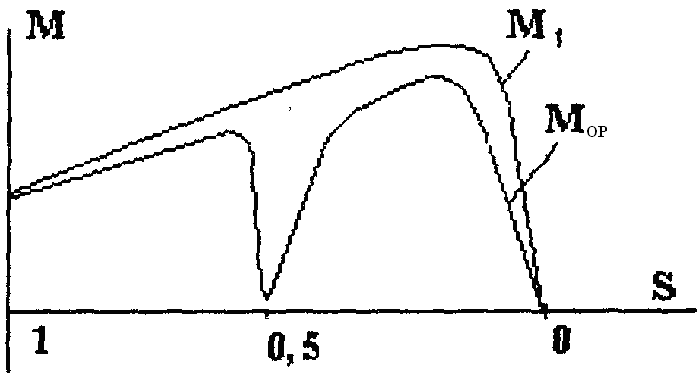
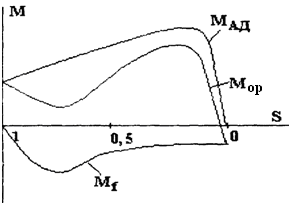
Электр магниттік қоздыруы бар синхронды қозғалтқышты асинхронды іске қосу кезінде қозғалтқыш синхронды жылдамдыққа жақын жылдамдыққа дейін жүргізіледі, одан кейін қоздыру орамасына тұрақты кернеу беріледі және қоздырылған электр қозғалтқышы синхронды жылдамдыққа тартылады.
Жиіліктік іске қосу кезінде синхронды қозғалтқыш синхронды айналуға бірден, аз айналу жиілігі кезінде келтіріледі. Тиристорлық қоздыруы бар синхронды электр жетегінің күштік бөлігінің сұлбасы 3.1.5 суретте келтірілген. Жылдамдықты жиіліктік реттеу кезінде айналу иін күші, жиілігі және қоректендіретін кернеудің амплитудасы араларындағы тиімді арақатынастары белгілі теңдеулермен жазылады:
U2/U1=(f2/f1) (Ф1М2/Ф2М1), (3.6)
мұнда Ф1, Ф2 - f1 және f2 жиіліктері кезінде машинаның ауа саңылауындағы магниттік ағындары;
М1, М2 - f1 және f2 жиіліктеріне сәйкес синхронды қозғалтқыш роторының айналу жиілігі кезіндегі жүктеме иін күштері.
3.5-сурет. Синхронды электр жетегінің күштік бөлігінің сұлбасы
Тұрақты статикалық иін күші және тұрақты магнит ағыны кезінде академик Костенко М.П шығарған реттеу заңын аламыз:
U/f=соnst
Электр магниттік қоздыруы бар синхронды қозғалтқыш үшін ауа саңылауында тұрақты магнит ағынын қамтамасыз ететін заң бойынша жиілігі мен кернеуін өзгерту ұсынылады. Жоғарыда аталғандай, синхронды машиналары бар электр жетегі соңғы 20-30 жылда қарқынды дамыды.
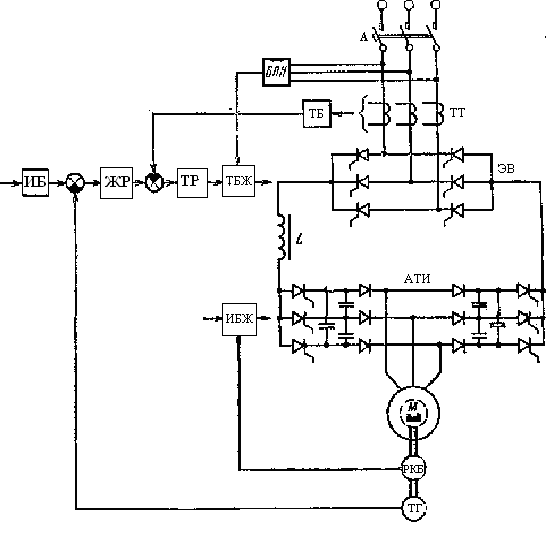
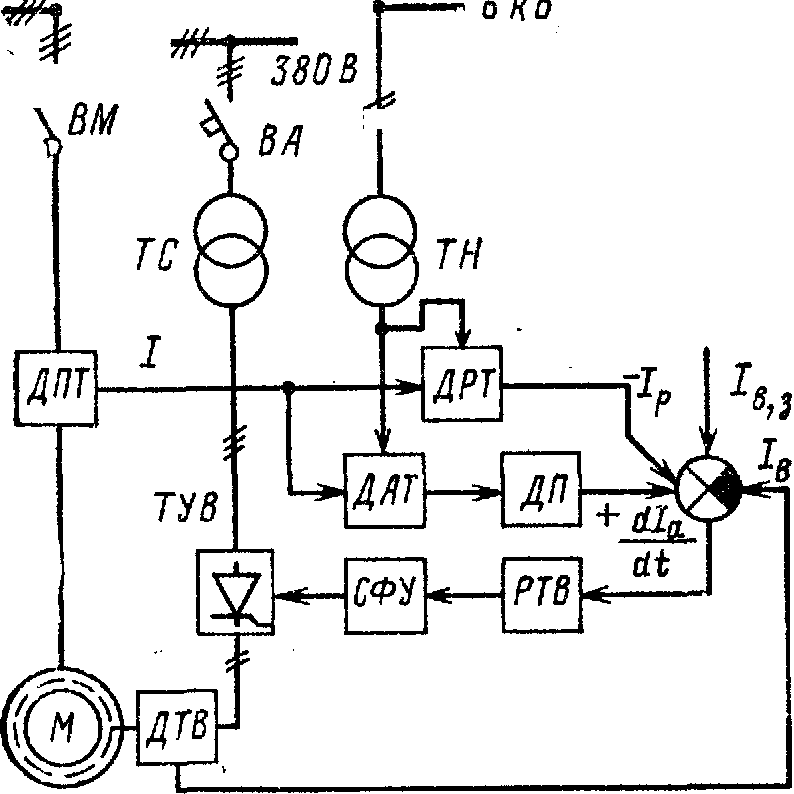
3.6-сурет. Тұрақты магниттері бар вентильді қозғалтқышты автоматты басқарудың құрылымдық сұлбасы және жетектің күштік бөлігінің принциптік сұлбасы
Кернеу векторын басқаруда түскен бұйрықтың санына тәуелді дозаланған бұрыштарға жылжыту идеясы соңғы он жылда кең даму алған жаңа ғылыми бағытқа – адымдық қозғалтқыштары бар дискретті электр жетегін жасауға әкеліп соқты. Планарлық, сызықтық, бұрылыстық, аралас қозғалтқыштар - модульдердің, берілген пішінді токтарды пішіндейтін түрлендіргіштердің көптеген түрлері пайда болды, күрделі және дәл қозғалысты қамтамасыз ететін басқару алгоритмдері жасалынды. Қолдану салалары да анықталды - әртүрлі технологиялық салалардағы икемді өндірістік жүйелерде микроэлектроникадан бастап бөлшектерді лазерлік өңдеу желілері, күрделі өнімдерді адамның кірісуінсіз автоматтандырып жинау үшін қолданылады.
Бұл идеяның басқа түрі – электронды коммутаторлары мен ротор күйінің бергіштерінің (датчик) синхронды қозғалтқыштармен араласуы – бұл вентильді қозғалтқыштар.
3.6-суретте жетектің күштік бөлігінің принциптік сұлбасы және тұрақты магниттері бар вентильді қозғалтқышты автоматты басқарудың құрылымдық сұлбасы көрсетілген.
Жиілік түрлендіргіші жиіліктік - токтық басқару сұлбасы бойынша орындалған. Автономды ток инверторын (АТИ) басқару қозғалтқыштың М білігіне орнатылған ротор күйінің бергішімен (РКБ) синхрондалатын импульстік басқару жүйесімен ИБЖ жүзеге асырылады. Жетекті басқару жүйесі тізбектелген түзетуі бар бағынышты реттеу принципі бойынша тұрғызылған және ток бергішінен ТБ алынатын ток бойынша кері байланысы және ток реттеуіші ТР бар ток контурынан және жылдамдық реттеуіші ЖР бар жылдамдық контурынан тұрады.
Вентильді қозғалтқыштар электр машиналарының жіктелуі туралы үйреншікті көзқарасты шатыстырды: қоректенуі бойынша олар тұрақты ток машиналары, әрекет ету принципі бойынша – синхронды және т.б. Шатыстырулар, әрине егер жүйелі көзқарасты қолданса пайда болмас еді. Әзірге вентильді қозғалтқыштарда электр механикалық және электрондық бөліктер (коммутатор - электронды коллектор) байланысқан. Бұл байланыс электр механотроникасы деп аталатын электр механикасының жаңа бөлімі болып құрылуына себепкер болды. Вентильді қозғалтқыштар конструкциясы дамып және функциясы ұлғайып станоктар, роботтар, манипуляторлардың электр жетегіндегі басқа техникалық шешулерге күшті бәсеке құрды.