

1.6 Электр жетектерінің бұрыштық жылдамдығын реттеу
Қазіргі заманғы өнеркәсіпте технологиялық процестердің талаптарына әртүрлі өзгеретін жылдамдықпен жұмыс істейтін өндірістік механизмдердің көп бөлігі қолданылады. Бұл өндірістік механизмдерде электр жетегінің жылдамдығын күштеп өзгерту – жылдамдықты реттеу талап етіледі. Жылдамдықты реттеу автоматты немесе қолмен реттеу тәсілімен жетектік электр қозғалтқышына қосымша әсер ету арқылы орындалады. Қазіргі уақытта әртүрлі күштік электронды түрлендіргіштер көмегімен жылдамдықты электрлік реттеу кең қолданыла бастады. Бұл түрлендіргіштер аз инерциялы және тұрақты ток кернеуі мәні бойынша немесе айнымалы ток кернеуі амплитудасы мен жиілігі бойынша реттелетін кернеуді өндіреді.
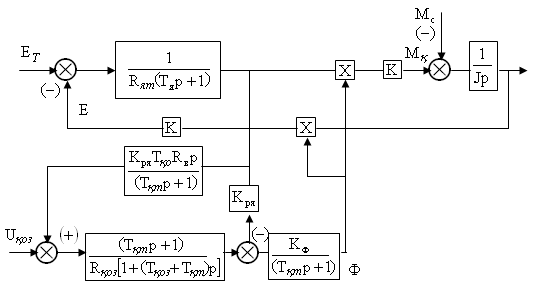
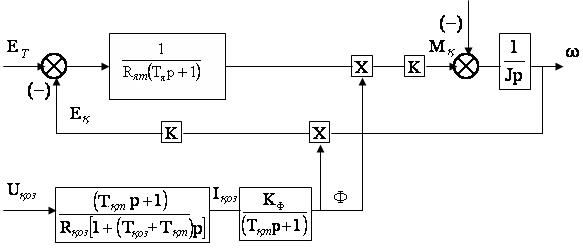
Түрлендіргіштер күштік транзисторлар немесе тиристорлар негізінде жиналуы мүмкін және олар дискретті режимде жұмыс істейді. 1.8 суретте электрлік түрлендіргіші бар автоматтандырылған электр жетегінің негізгі элементтерінің сұлбалық өзара әрекеттесуі келтірілген.

1.8 – сурет. Реттелетін электр жетегінің құрылымдық сұлбасы
Электр жетегі жылдамдығын реттеудің әртүрлі тәсілдерін сипаттайтын негізгі көрсеткіштер:
а)
бұрыштық жылдамдықтың реттеу ауқымы.
Максималды тұрақтанған жылдамдықтың
минималды тұрақтанған жылдамдыққа
қатынасымен
![]() анықталады;
анықталады;
б) реттеудің жатықтығы. Берілген жылдамдықтан ωi жақын мүмкін болатын жылдамдыққа ωi+1 өткен кездегі жылдамдықтың секіруін сипаттайды
![]() ;
;
в) реттеудің үнемділігі.Технологиялық процестің жоғары сапасы мен салыстырмалы түрде құнын тез өтейтін механизмнің үлкен өндірушілігін қамтамасыз ететін электр жетегін жасау және қолдану шығындарымен сипатталады;
г) бұрыштық жылдамдықтың тұрақтылығы. Жүктеме иін күшінің берілген ауытқуы кезіндегі бұрыштық жылдамдықтың өзгеруін сипаттайды. Сипаттаманың қатаңдығы көп болған сайын бұрыштық жылдамдықтың тұрақтылығы жоғары;
д) реттеу жылдамдығының бағыты, яғни негізгі жылдамдыққа қатысы бойынша оның көбеюі немесе азаюы реттеу тәсілдеріне байланысты;
е) қозғалтқыштың рұқсат етілген жүктемесі – реттеу сипаттамаларындағы жұмысы кезіндегі қозғалтқыштың ұзақ уақыт жұмыс істей алатын иін күшінің ең үлкен мәні, ол қозғалтқыштың қызуымен анықталады және реттеудің сан-алуан тәсілдері үшін әртүрлі болады.
2 Тұрақты ток электржетегі
2.1 Тәуелсіз қоздырылатын тұрақты ток қозғалтқыштары негізіндегі электр жетегі.
Тәуелсіз қоздырылатын тұрақты ток қозғалтқышы (ТТҚ) электр энергиясын механикалық энергияға түрлендіру үшін қолданылатын автоматты басқару жүйесінің бір бөлігі болады. Машиналардың кері жұмыс істеу принципі бойынша тәуелсіз қоздырылатын тұрақты ток қозғалтқыштары қозғалтқыштық режиммен бірге тежеу режимдерінде де жұмыс істей алады. 2.1 - суретте машинаның якорь тізбегін қоректендіретін түрлендіргіштің шамалары ескерілген электр қозғалтқышының орын басу сұлбасы көрсетілген. 2.1 - суреттегі белгілеулер: Ет –түрлендіргіштің э.қ.к – сі; Rт, Lп – түрлендіргіштің активті және индуктивті кедергілері; Eқ, Iя – қозғалтқыштың э.қ.к – сі және тогы; Rқ, Lқ - қозғалтқыштың активті кедергісі және индуктивтілігі; Uқоз – Wқоз орам саны бар машинаның қоздыру орамасындағы кернеуі; - машина ағыны; Rқоз – қоздыру орамасының кедергісі; Ls – сейілу индуктивтілігі; Iқоз – қоздыру тогы; Rк – құйынды токтар контурының балама кедергісі; Mқ және Mс – қозғалтқыш иін күші және статикалық кедергілер иін күші (2.1.2 - сурет); J – қозғалтқыштың инерция иін күші. Машинаның якорь тізбегі және электр жетегінің механикалық бөлігі үшін төмендегідей арақатынасын аламыз
Eт(p)-Eқ(p)=Iя(p)[Rт+Rқ+(Lт+Lқ)p], (2.1)
Mқ(p)-Mс(p)=Jp(p), (2.2)
Mқ(p)=kIя(p), (2.3)
Eқ(p)=k(p). (2.4)
Kря коэффициенті бар якорь реакциясын, сонымен қатар ағын мен қоздыру тогы Iқоз шамалары арасындағы пропорционалдық коэффициенті бар магниттелу сипаттамасының қисық сызықтығын, I – ші түйін және IK, 2K контурлары үшін Кирхгоф заңдары негізінде алынған қоздыру тізбегінің теңдеулерін есепке ала отырып, келесі арақатынасты табамыз
Iм(p)=Iқоз(p)-Iк(p)-KряIя(p), (2.5)
Uқоз(p)=Iқоз(p)[Rs+Lsp]+Iк(p)Rк , (2.6)
Iк(p)Rк-Wқозp(p)=0, (2.7)
(p)=KIм(p). (2.8)
(2.5)-(2.8) теңдеулеріне түрлендірулер жүргізе отырып, аралық айнымалыларды шығарып тастап, қоздыру тогы Iқоз(p) және ағын (p) үшін келесі теңдеулерді аламыз
 ,
(2.9)
,
(2.9)
 ,
(2.10)
,
(2.10)
мұнда Tқт – құйынды токтардың уақыт тұрақтысы;
Tқоз – қоздыру орамасының балама уақыт тұрақтысы, Tқоз=Tқо+Ts;
![]()
Ts – сейілу ағынының уақыт тұрақтысы; ;
![]()
Tқо – қоздыру орамасының уақыт тұрақтысы; ;
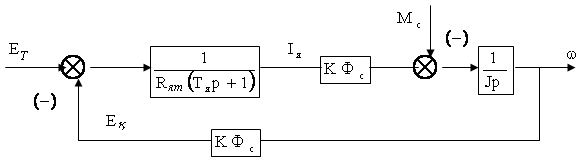
(2.1), (2.4), (2.9), (2.10) теңдеулері негізінде 2.1 - суретте қозғалтқыштың құрылымдық сұлбасы келтірілген.
2.1 – сурет. Тәуелсіз
қоздырылатын ТТҚ – ның құрылымдық
сұлбасы
Оның электр магниттік уақыт тұрақтысы Tя келесі формула бойынша анықталады
 ,
,
 .
.
2.1 - суретте якорь реакциясы әсерін есептемеген жағдайда алынған қозғалтқыштың құрылымдық сұлбасы келтірілген. Машина ағынын тұрақты деп есептеп, 2.3 - суретте көрсетілген қозғалтқыштың құрылымдық сұлбасын аламыз.
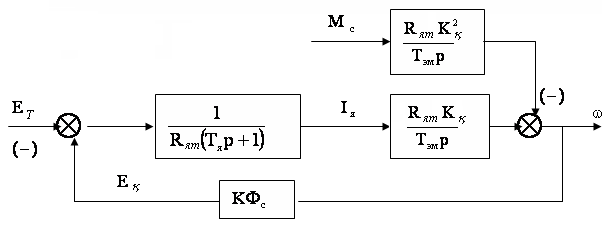
Әсер етуші әрекетті иін күш Mс(p) түрінде шығысына ауыстырып, қозғалтқыштың электр механикалық уақыт тұрақтысы Tэм мен қозғалтқыштың беріліс коэффициентін Kд есепке ала отырып, 2.2 - суретте келтірілген қозғалтқыштың құрылымдық сұлбасын аламыз.
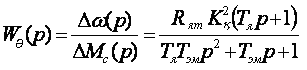
Құрылымдық сұлбаны түрлендіре отырып, басқару және әсер ету әрекеттері бойынша машинаның беріліс функциясын аламыз.
 ,
(2.11)
,
(2.11)
 .
(2.12)
.
(2.12)
2.2
- сурет.
Тәуелсіз
қоздырылатын ТТҚ - ның түрлендірілген
құрылымдық сұлбасы
Динамикада қозғалтқыштың құрылымдық сұлбасы 2.3-суретте көрсетілген.
2.3
– сурет.
Тәуелсіз
қоздырылатын ТТҚ - ның түрлендірілген
сұлбасы
Статикада p=0, иін күш Mқ пен қозғалтқыш тогы IЯ арасындағы байланыс (2.3) бойынша, сонымен бірге түрлендіргіш э.қ.к – сі Eт тұрақты ток желісі кернеуіне тең деп есептеп, 2.5 - суретте келтірілген қозғалтқыштың статикадағы құрылымдық сұлбасын аламыз. Қозғалтқыштың электр механикалық және механикалық сипаттамаларының теңдеулері мына түрге келеді
![]() ,
(2.13)
,
(2.13)
![]() .
(2.14)
.
(2.14)
2.4
- сурет
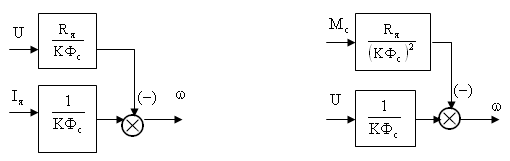
2.5
– сурет.
Тәуелсіз
қоздырылатын ТТҚ –ның статикадағы
құрылымдық сұлбалары
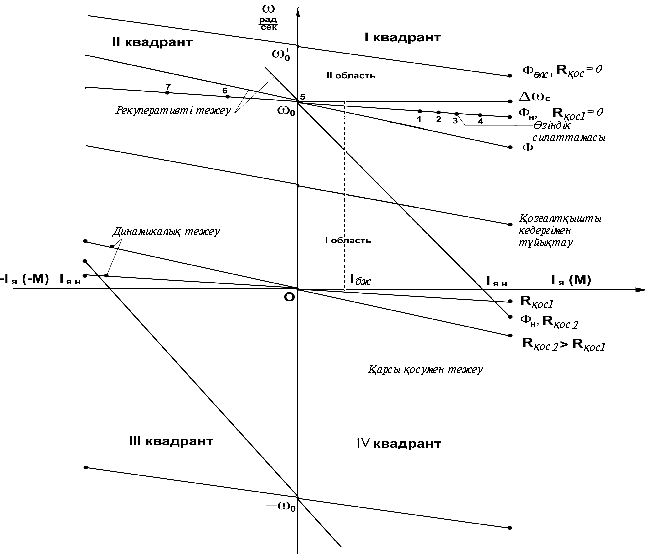
Графиктік түрде қозғалтқыштардың электр механикалық және механикалық сипаттамалары (2.7 - сурет) жазықтықта төртінші квадрантта келтіріледі. Электр механикалық және механикалық сипаттамалары =f(Iя), =f(M) арақатынасына сәйкес; бұл жерде - қозғалтқыштың айналу жиілігі; Iя – қозғалтқыштың якорь тогы; М – қозғалтқыштың иін күші.
Қозғалтқыштың өзіндік сипаттамасы оның нақты кернеумен қоректеніп, қалыпты сұлбасымен қосылғанда және қозғалтқыштың якорь тізбегінде қосымша кедергілер Rқос болмаған кезде алынады.
Тежеу режимдерінде тұрақты ток машинасы генератор ретінде жұмыс істейді, ал әртүрлі тежеудің түрлері бір-бірінен тек тұрақты ток желісі кернеуі мен якорь кернеуі бағытына қатысты болады. Үш тежеу түрі бар: рекуперативті, динамикалық және қарсы қосумен тежеу.
(2.13) және (2.14) теңдеулерінен анықталғандай, қозғалтқыштың айналу жылдамдығын басқару келесі тәсілдер арқылы мүмкін болады:
1) қозғалтқыштың якорь тізбегіне қосылған кернеуді U өзгерту;
2) қозғалтқыштың якорь тізбегіне кедергі Rқос енгізу;
3) қозғалтқыштың ағынын әл мәніне дейін азайту.
2.6
– сурет.
Механикалық
сипаттамалары
1 аймақта (2.7 - сурет) қозғалтқыштың якорь тізбегіне қосылған кернеуді U өзгерту және 2 аймақта (2.7 - сурет) қозғалтқыш ағынын әл (ағынды әлсірету) мәніне дейін азайту арқылы қозғалтқыштың айналу жылдамдығын басқару екі аймақты реттеу деп аталады. Мұнда қалыпты ағын н тұрақты кезінде якорьдегі кернеуді басқару қозғалтқыштың иін күші тұрақты кезінде айналу жылдамдығын реттеуге сәйкес келеді. Қозғалтқыштың якоріндегі кернеу U тұрақты кезінде қозғалтқыш ағынын басқару қозғалтқыштың қуаты тұрақты кезіндегі айналу жылдамдығын реттеуге сәйкес келеді.
Якорге тұрақты кернеу U берілген тәуелсіз қоздырылатын ТТҚ – ның М принциптік сұлбасы 2.8 - суретте көрсетілген. Қоздыру орамасы LM арқылы машинаның М ағыны Ф пайда болады. Машинаның якоріндегі кернеу U полюстерін өзгертумен (айналу бағытын өзгерту) қозғалтқышты кері айналдыру іс жүзінде қолданыс тапты. Кері айналдыру кезінде қозғалтқыштың электр механикалық теңдеуі төмендегідей болады:
![]() .
(2.15)
.
(2.15)
2.9 - суретте қозғалтқышты кері айналдыру сұлбасы көрсетілген. S1-S2 кілттері ретінде түйіспелі, сонымен бірге түйіспесіз элементтерді қолдануға болады. S1 кілті түйіскен кезде IЯ якорь тогы +, S1, М, S1, - тізбегі бойынша ағады, сол кезде якорге +, - таңбаларымен белгіленген кернеу U қосылады. S2 кілті түйіскен кезде Iя якорь тогы +, S2, M, S2, - тізбегі бойымен ағады, бұл кезде якорге шеңбермен белгіленген + және – таңбалы кернеу U қосылады.
Рекуперативті тежеу режимінде қозғалтқыштың қарсы э.қ.к – сі тұрақты ток желісі кернеуінен U үлкен болады және рекуперативті тежеу режиміндегі электр механикалық сипаттамасының теңдеуі төмендегідей болады
![]() .
(2.1.16)
.
(2.1.16)
Қарсы қосу режимінде қозғалтқыштың қарсы э.қ.к – сі желі кернеуімен U бірге қозғалтқыштың якорь тізбегін қоректендіреді. Тұрақты ток желісімен U тізбектеле қозғалтқыш генератор ретінде жұмыс істейді және барлық энергия жылу түрінде қозғалтқыштың якорь тізбегінде бөлінеді. Бұл режимде қозғалтқыш өзінің иін күшіне қарама-қарсы бағытта айналады. Қарсы қосу режиміндегі қозғалтқыштың электр механикалық сипаттамасының теңдеуін аламыз
![]() .
(2.1.17)
.
(2.1.17)
Динамикалық режимде қозғалтқыш якорі желіден ажыратылған (U=0) және тежеу кедергісіне тұйықталған. Динамикалық тежеу режиміндегі электр механикалық сипаттаманың теңдеуі
![]() .
(2.1.18)
.
(2.1.18)
2.10 - суретте қозғалтқышты динамикалық тежеу сұлбасы көрсетілген.
Қозғалтқыштың электр механикалық және механикалық сипаттамасының еңістігі қателік шамасымен бағаланады
![]() ,
(2.19)
,
(2.19)
мұнда с - (2.13) - (2.14) теңдеулерінен анықталатын қозғалтқыш М жылдамдығының статикалық төмендеуі
 (2.20)
(2.20)
Қозғалтқыштың
іске қосу тогының секіруін шектеу
қозғалтқыштың якорь тізбегіндегі
шамасын якорь тогы, қозғалтқыш жылдамдығы
немесе уақыт функцияларының бірімен
реттеп өзгерту жолымен іске асырылады.
Машинаны іске қосу диаграммасы дұрыс
тұрғызылған кезде кедергілерді қосу
максималды және минималды мүмкін якорь
токтарының шамаларында орындалады.
Максималды мүмкін якорь тогы шамасы
IIн
мәніне, ал минималды мүмкін шама
(1,051,1)Iн
мәніне сәйкес болады, мұнда: Iн
– қозғалтқыш якорь тогының нақты мәні;
![]() 1
– қозғалтқыштың ток бойынша аса жүктеу
коэффициенті.
1
– қозғалтқыштың ток бойынша аса жүктеу
коэффициенті.
Қозғалтқыштың басқару Wб(p) және әсер ету әрекеті Wә(p) бойынша беріліс функцияларын (2.11 - 2.12) теңдеулері арқылы талдау сипаттамалық теңдеу түбірлерінің түріне байланысты қозғалтқыш тербелмелі, екі апериодты, апериодты бөліктердің бірі болып берілуі мүмкін. Бұл кезде басқару бойынша өтпелі процестер =f(t) әртүрлі сипат алады:
а) комплексті түбірлер кезінде – тербелмелі өтпелі процесс;
б) жай түбірлер кезінде – иілу нүктесі анық көрінген екі экспонента түріндегі өтпелі процесс;
в) қозғалтқыштардың уақыт тұрақтыларының арасындағы айырмашылығы Tэм>>Tя кезінде – экспонентті өтпелі процесс.
Тәуелсіз қоздырылатын ТТҚ – ның жақсы реттеу қасиеттері бар. Соңғы уақытта пайда болған микропроцессорлық басқаруы бар жиіліктік электр жетектері көмегімен асинхронды қысқа тұйықталған машинаны ТТҚ – ның орнына қолдануға мүмкіндік алды.