

4.6. Типтік тұрақталған динамикалық режимдегі электржетегінің энергетикалық көрсеткіштері
Динамикалық режимдегі электржетектің энергетикалық көрсеткіштеріне анализін екі кезеңде жүргіземіз. Басында статикалық жақын режимді қараймыз, болмаған кезде айнымалының орташа мәні (момент және жылдамдық) тұрақты (мұндай режимді тұрақталмаған динамикалық деп атайды, ал одан кейін өтпелі режимдерге анализ жүргіземіз.
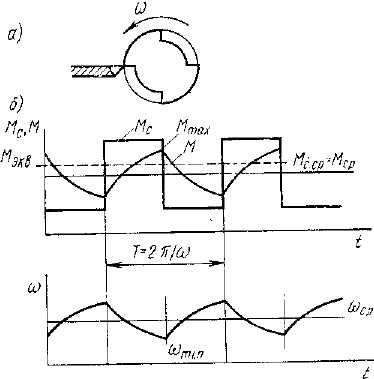
Тұрақталған динамикалық режимнің пайда болуының мысалы 2.13,а-суретте көрсетілген. Электр жетегінің басты қозғалысы токорлық станок деп аталады, өңдеу режимінде жұмыс органы (кескіш) детальмен периодтық контактта жұмыс істемейді. Ол кезде периодтық жүктеме мен бұрыштық жылдамдықтың периодтық тербеліс пайда болады. Бұл режимдегі айнымалының өзгерісі 2.13,б-суретте сапалы көрсетілген. Болашақта анализді жеңілдету үшін айнымалы тұрақталған динамикалық процесін гармоникалық функция түрінде келтіреміз.
Мұндай режимге анализді жай жағдайдан бастайды. Жұмыс органға периодтық жүктеме тұрақты және синусоидалы құраушылардан құралсын. Бұл кезде жұмыс органының бұрыштық жылдамдығына гармоникалық тербеліс пайда болады. Егер жүктеменің орташа құраушысы қозғалтқыштың электромагнитті моментінің орташа құраушысына теңестірілсе, {Мсср=Мср) онда жалпы көрініс (2.25)
мұнда
![]() –бұрыштық жылдамдықтың орташа мәні;
–бұрыштық жылдамдықтың орташа мәні;
![]() (
(![]() -
механикалық сипаттаманың қатаңдығы);
-
механикалық сипаттаманың қатаңдығы);
![]() – бұрыштық жылдамдықтың амплитуда
синусоидалы құраушысы;
– бұрыштық жылдамдықтың амплитуда
синусоидалы құраушысы;
![]() -жиілік
; Т
-тербеліс периоды.
-жиілік
; Т
-тербеліс периоды.
4.24-сурет шартының мысалы, электржетгінің жұмыс кезінде Л1С, М(б) айнымалылардың өзгерісін сапалы көрсетеді.
Сондықтан қосымша шығындарды азайту тәсілін таңдау үшін, р және /2 параметрлерінің өзгеру салдарын мұқият анализін жасау қажет.
Алынған аналитикалық қортындыны механизмдер мысалында, периодтық жүктеме кезіндегі процесстердің анализімен толықтырамыз. Оларға Мс(т) процессі тез ауыспалы, бірақ периодтық сипаттамада (штамптар, престер). 4.24(а)-суретте мұндай механизмдердің схемасы, ал 4.24 (б)-суретте жүктеменің статикалық моментінің жобалы графиктері көрсетілген.
Статикалық жүктеме графигі тез біріңғай емес – Ммах Мх ползунының бос орын ауыстыру моментінен өте ерекшеленеді. Моментердің мұндай біріңғай еместігінен балама момент Аfc,3кв /Иср орташа моментіненбіраз ауытқиды. Бұл өз орнына шығындардың көбейуіне, энергияның шығындалуына және машинаның қызуына алып келеді. Одан басқа, Аfмахқозғалтқыш моментің болуы қолайсыз. Мұндай жағдайларда /₤ ұлғайту арқылы М(t) (жылдамдықтың) моментінің диаграммасын «түзету» дұрыс болады, бұл өз орнына механизмнің жұмысына қажетті шығындар мен энергия шығындарын азайтып, орташа О)cр және орташа өнімділікті сақтап қалады. Маховик арқылы Jх –ті ұлғайтып, қойылған мақсатты орындауға мүмкіндік береді.
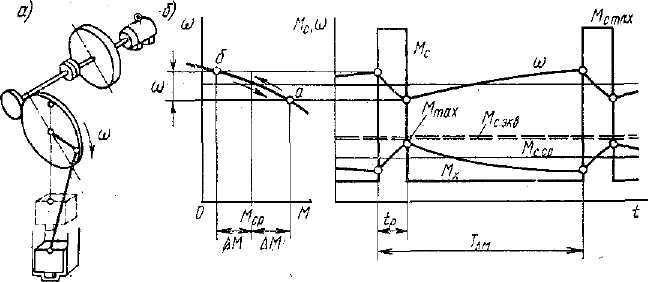
4.25 -сурет. Жүктемесінің тез ауыспалы сипаттамасы бар механизмдер – престер, штамптар(а), олардың электрожетектегі ауысымдарының жобалы диаграммаларының өзгеруі(б)
Бос жүріс учаскісінде Мс=Мх , яғни жылдамдық басында (соққыдан кейін)орташа мәннен аз болған кезде (а-нүктесі), жылдамдықтың ұлғаю мен механикалық бөлігіндегі кинетикалық энергияның жиналуы болады (әсіресе маховикта), өйткені динамикалық момент (Мср-ЛГс) >0. жүктеменің тез өсу кезінде маховик «разрядталады», бұл кезде оның жұмысы күшті өтеуге кетеді. Сондықтан қозғалтқыш бұл бөлікте Мс-ке қарағанда кішкене момент туғызады.
Содан кейін жоғалтылған кинетикалық энергияны қайта жинау бөлігі басталады. Осындай түрмен қосымша маховигі бар электрожетегінде уақыт бойынша қозғалтқышпен механикалық энергияның аккумуляторы – маховиктің жұмысы алмастырылып, жылдамдық пен момент түзетіледі.
Дәл осындай тербелмелі режимдегі, механикалық бөліктегі күштік каналдағы энергия шығындарын бағалаймыз.
![]() (4.31)
(4.31)
(4.31) өрнегі электржетектегідей жүктемеден пайда болатын механикалық бөліктегі шығындар өрнегіне ұқсас екендігін білеміз.
Мысалы, (4.31) келтірілген мәндердің қатынасын көрсетсе, яғни барлық механикалық бөлікті көрсетеді. Барлық элементтердің үйкеліс моментері қозғалтқыштың білігіне келтіріледі. Сондықтан бұл энергетикалық канал бөлігіндегі, тербелмелі қозғалыс сипаттама кезіндегі шығындарды мына түрде көрсетуге болады:
(4.32)
Орнықтырылған динамикалық режимдегі пайдалы моментті жоғарғыдай екендігін біліп, мына қосынды түрінде беруге болады:
![]() (4.33)
(4.33)
Қарастырылған
шарт бойынша, егер электржетегінің
механикалық сипаттамасы қатты немесе
жақсы регулятордың болуы кезінде
![]() және
Мс
=var, болуы мүмкінбұл жағдайдағы орташа
шығындарды бағалау үшін жылдамдық
орташа мәнімен жүктеме моментін білу
жеткілікті. Ал егер де жүктеменің
периодтық момнеті кезінде жылдамдық
тербелісі байқалса, онда механикалық
бөліктегі орташа шығындар орташаландыру
тәсілі арқылы мына түрде
көрсетіледі:AP=Q(t)M(t):
және
Мс
=var, болуы мүмкінбұл жағдайдағы орташа
шығындарды бағалау үшін жылдамдық
орташа мәнімен жүктеме моментін білу
жеткілікті. Ал егер де жүктеменің
периодтық момнеті кезінде жылдамдық
тербелісі байқалса, онда механикалық
бөліктегі орташа шығындар орташаландыру
тәсілі арқылы мына түрде
көрсетіледі:AP=Q(t)M(t):
![]()