

3.4 Асинхронды қозғалтқышты кернеуін өзгертумен басқару
Статор кернеуінің өзгеруі асинхронды қозғалтқыштың критикалық иін күшінің Мкр өзгеруіне әкеледі, оның мәнін орын басу сұлбасы негізінде анықтауға болады:
Мк = 3k2sU2s/2Wsxs , (3.28)
мұнда Ws - өрістің бұрыштық айналу жылдамдығы.
Бұл жағдайды қозғалтқыштың айналу жиілігін басқару үшін қолдануға болады, егер де критикалық сырғу мәні
Sk = R1/xs (3.29)
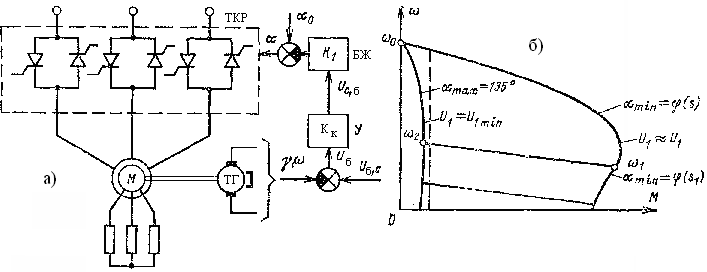
салыстырмалы түрде үлкен немесе фазалы роторы бар қозғалтқышты қолданған жағдайда ротор тізбегіндегі қосымша кедергілердің көмегімен жеткілікті үлкен болып жасалынған. 3.31-суретте осы басқарудың принциптік сұлбасы және Sк=1 кезінде ωS/ω0=f(M/MH) сипаттамасы көрсетілген. Айналу жиілігін басқару өрісті әлсіретуге негізделгендіктен, қозғалтқыш тек азайтылған иін күшімен төменгі айналу жиілігінде ғана жұмыс істейді.
Айналу жиілігін реттеу кезінде ротор тізбегінде, басым бөлігі қосымша кедергілерде шығындар орын алады, мұның өзі электр жетегінің көптеген қолданылуы үшін жайсыз болады. Осыдан қорытқанда, статор кернеуін басқару бірқатар жағдайларда жүк көтеруші электр жетегі үшін қолданылады, мұнда үзікті ток режимі жұмысы салдарынан шығындар салыстырмалы түрде көп емес, немесе желдеткіш жетектері үшін, мұнда кедергі иін күші төменгі айналу жиіліктері кезінде тіпті аз болады. Қарастырылған басқаруды қолдану саласы осы уақытта аз ғана қуаттармен (P<50 кВт) шектеледі. Күштік түрлендіргіштер ретінде айнымалы токтың толық және жартылай басқарылатын вентильді коммутаторлары қолданылады.
Статор кернеуі тиристорлар көмегімен желі кернеуінің бір бөлігін „кесіп тастау” жолымен басқарылады. Осының салдарынан жоғарыланған жылу және магниттік шығындарды тудыратын статор кернеуі мен тогының жоғары гармоникасы, сонымен бірге иін күш гармоникалары пайда болады. Мұндай басқарудың орнына статорды желіге периодты қосу жолымен айналу жиілігін реттеуді қамтамасыз ететін релелі ажыратып-қосқыш ретінде қызмет ететін тиристорлы құрылғыны қолдану мүмкін (екі позициялық реттеу). Соңғы тәсілді жүзеге асырудың келесі қиндықтары бар:
- қозғалтқышты периодты ажыратып-қосу машина мен редукторда үлкен әрі жиі рұқсат етілмейтін механикалық жүктемелерді пайда қылады;
- есептеулер көрсеткендей, критикалық иін күшінің үш - төрт есе мәні орын алады;
- қозғалтқышты келесі қосу уақытында рұқсат етілмеген электрлік жүктемелер болмас үшін, алдындағы ажыратудан пайда болған өтпелі процестер толығымен бітуі керек;
- қосу және ажырату арасындағы үзіліс үш ротордың электр магниттік уақыт тұрақтысына жуық мәні, кәдімгі механикалық инерциялығы мен жүктемесі бар қозғалтқыштың айналу жиілігін шектен тыс үлкен тербелістерге әкеледі.
3.31-сурет.
Аталған қиындықтарға байланысты асинхронды қозғалтқыштың айналу жиілігін релелік реттеу қолданылмайды. Бірақ, ротордың кедергісі үлкен қозғалтқыштар үшін, мысалы қозғалтқыштың электр магниттік және механикалық инерциялылығының арасындағы арақатынасты жақсартуға мүмкін болатын түйіспелі сақиналары мен қосымша кедергілері бар қозғалтқыштар үшін аталған басқару принципін жүзеге асыру мүмкін болады. Релелік басқару сызықтық қозғалтқыштар үшін қолданылады, өйткені олар механизммен қатаң, редукторсыз жалғанған және электр магниттік және механикалық уақыт тұрақтылары арасындағы арақатынасты шарттайтын жұмсақ сипаттамасы болады. Қозғалтқышты таңдау кезінде ажыратып қосу кезінде пайда болатын күштер есепке алыну керек.
Қозғалтқыш пен түрлендіргіштің шамаларын таңдау. Статор кернеуін басқару кезінде қозғалтқыштың қызуын есептеу көптеген әсер етуші факторларға байланысты біршама қиындықтар тудырады. Есепке келесі факторлар алынады:
а) өзін желдететін қозғалтқыштардың жылу берілісі айналу жиілігіне (сырғуға) тәуелді. Сырғу өскен сайын рұқсат етілген шығын қуаты төмендейді. Қуаты P<50 кВт асинхронды қозғалтқыштар үшін шамалап жазуға болады:
PVz /PVн = 0,6(1+Sн – S) +0,4 , (3.30)
мұнда: PVн –Sн сырғуы кезіндегі нақты шығын қуаты
PVz - S сырғуы кезіндегі рұқсат етілген шығын қуаты
б) кедергі иін күшінің айналу жиілігіне тәуелділігі көптеген іс жүзіндегі жағдайларды қамтиды.
Mw = CW n, n = 0; 1;2 (3.31)
в) статор кернеуінің синусоидалығын қамтамасыз ететін реттегіш трансформатордың көмегімен кернеуді басқару кезінде қозғалтқыштағы жылулық және магниттік шығындар сырғуға және жүктемеге тәуелді. Сырғу функциясындағы максималды рұқсат етілген иін күшін анықтауға ыңғайлы қалыпты шектік М-S сипаттамасын есептеуге болады (0 сипаттамасы, 1.32 б-суреті).
г) тиристорлы коммутатормен басқару кезінде жоғарылаған қызу шығындарына әкелетін кернеу мен токтың біршама гармоникалары байқалады. Бұл шығындарды есептеу қиын. Тәжірибелік есептеулер кезінде қозғалтқыштың қуатын алдын-ала анықтау априорлы берілгендері негізінде жүзеге асырылады, яғни максималды қуат шығынын шамалап бағалау жолымен орындалады. Бұдан кейін қалыпты жүктемелік сипаттама тұрғызылады. Егер тұрғызылған сипаттама шектік сипаттаманың сол жағында жатса, қозғалтқыш қызуы бойынша дұрыс таңдап алынады. Кейбір механизмдердің жылдамдығын реттеу қажеттілігі кезінде электр жетегінің түрі реттеудің жұмсақтығы мен ауқымына қойылатын талабымен анықталады. Салыстырмалы аз қуатты электр жетектері үшін (40-60 кВт), жылдамдықты сатылап реттеуді талап ететін, мысалы, пластиналы қоректендіргіштер үшін, жылдамдығын статор орамасының полюстер жұбының санын өзгертумен реттейтін асинхронды қысқа тұйықталған көп жылдамдықты қозғалтқыштарды қолдануға болады. Жылдамдықты жұмсақ реттеу үшін каскадты реттеуі бар асинхронды электр жетегін қолдануға болады.
Асинхронды қысқа тұйықталған қозғалтқыштары мен аралық муфталары бар электр жетектерінде жүктемелерді теңестіру муфтаның сырғуын өзгертумен, гидравликалық муфтада - муфтаның көлемін толтырумен өзгерту, электр магниттік сырғу муфтасында индуктордың қоздыру тогын өзгертумен мүмкін болады.