

8.3. Метод описывающей функции. Асимптотические методы
План лекции
Метод описывающей функции
Асимптотические методы
Метод описывающей функции
Метод по существу является модификацией метода гармонического баланса для случая, когда систему можно разбить на линейную и нелинейную части, причем нелинейная часть такова, что ее свойства с удовлетворяющей нас точностью можно охарактеризовать, учитывая только одну гармонику.
При подаче на вход нелинейного элемента гармонического колебания на выходе будет несколько гармоник, причем амплитуда и сдвиг фазы основной гармоники выходного сигнала зависят только от амплитуды входной гармоники и не зависят от частоты.
Так, если acosrj)—входной сигнал, то амплитуда и фаза первой гармоники выходного сигнала могут быть выражены как функции амплитуды входного сигнала Ь(а)cos 6(a)].
Функции Ь (а) и 0 (а) называются описывающими функциями, учитывающими в своем описании нелинейного элемента только первую гармонику выходного сигнала.
При таком рассмотрении нелинейный элемент может быть описан передаточной функцией
![]()
Если остальные элементы системы линейны и их комплексный коэффициент Передачи (ККП), (зависящий от частоты и не зависящий от амплитуды) /Сл(/(о), то систему можно разбить на две части: линейную и нелинейную. Блок-схема такой системы изображена на рис. 10.6.
Автоколебания. В линейных системах при отсутствии внешних воздействий существует единственный стационарный режим — статический, при котором все описывающие поведение системы величины постоянны.
В Нелинейных системах помимо статического может существовать автоколебательный стационарный
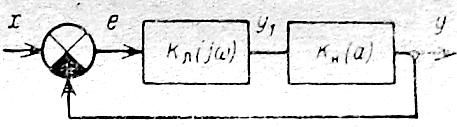
Рис. 8.5. Блок-схема системы с безреактивным нелинейным элементом.
режим, при котором все описывающие поведение системы величины — периодические функции вре- м е ни.
При существовании в системе автоколебаний их амплитуда и фаза находятся при х=0. Учитывая только первую гармонику автоколебаний, получим:
 8.11
8.11
Так
как в общем случае
![]() —комплексные
величины, уравнение (10.10) распадается
на два (действительная часть произведения
—комплексные
величины, уравнение (10.10) распадается
на два (действительная часть произведения
![]() приравнивается
к —1, а мнимая—к нулю), из которых в
принципе можно определить амплитуду и
частоту первой гармоники автоколебаний.
приравнивается
к —1, а мнимая—к нулю), из которых в
принципе можно определить амплитуду и
частоту первой гармоники автоколебаний.
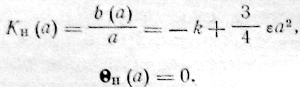
Пример.RC-генератор синусоидальных колебаний (рис. 10.6). В шервом приближении нелинейную характеристику лампы можно аппроксимировать полиномом третьей степени ца——kug+gu3d-Еслиug=acosψто первая гармоника выходного напряжения определяется следующим соотношением.

Из атого выражения следует, что передаточная функция нелинейного элемента равна
ККП линейной части трех /?С-цепочек, каждая с постоянной времениT—RC. определяется обычным методом и равна

Для
рассматриваемой схемы условие
гармонического баланса соответствует
уравнению![]() .
Знак плюс перед единицей в правой
части этого уравнения является результатом
отсутствия в схеме вычитающего
элемента.Подставив в это уравнение
значенияКв[а)
и Дл (/со), получим равенство
.
Знак плюс перед единицей в правой
части этого уравнения является результатом
отсутствия в схеме вычитающего
элемента.Подставив в это уравнение
значенияКв[а)
и Дл (/со), получим равенство

из которого определим частоту и амплитуду первой гармоники автоколебаний:
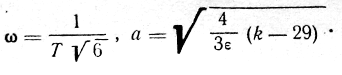
Последнее выражение позволяет определить условие возбуждения автоколебаний: k>29.
Асимптотические методы
Разработанные советскими учеными Крыловым Н. М., Боголюбовым Н. Н., Митропольским Ю. А. асимптотические методы являются комбинацией, дальнейшим углубленном н развитием методов возмущений и вариации параметров.
Решение в этих методах ищем в виде

где
![]() —
частота, равная резонансной частоте
контура или мало отличающаяся от нее;
а, -0-—амплитуда
и фаза колебаний — медленные функции
времени.
—
частота, равная резонансной частоте
контура или мало отличающаяся от нее;
а, -0-—амплитуда
и фаза колебаний — медленные функции
времени.
Законы изменения амплитуды и фазы колебаний определяются уравнениями

Функции
![]() учитывают
высшие гармоники и не должны содержать
основной частоты ω.
учитывают
высшие гармоники и не должны содержать
основной частоты ω.
Зависимости
![]() определяются
подстановкой
определяются
подстановкой![]() в исходное дифференциальное уравнение
системы и приравниванием коэффициентов
при одинаковых степенях в, как и в методе
возмущений. Более подробно с
асимптотическими методами можно
познакомиться в специальной литературе.
в исходное дифференциальное уравнение
системы и приравниванием коэффициентов
при одинаковых степенях в, как и в методе
возмущений. Более подробно с
асимптотическими методами можно
познакомиться в специальной литературе.
ЛЕКЦИЯ 26