

Вопрос 42. Ад с улучшенными пусковыми свойствами
Стремление улучшить пусковые свойства АД с КЗР привела к созданию АД с улучшенными пусковыми свойствами:
С повышенным скольжением – обмотки ротора обладают большим активным сопротивлением, следовательно, пусковой момент увеличивается, пусковой ток уменьшается.
Глубокопазных – пазы сердечника ротора выполнены глубокими. В них укладывается обмотка. Принцип действия основан на эффекте вытеснения тока: при пуске двигателя ток ротора проходит по слоям стержней, обращенных к воздушному зазору, где индуктивное сопротивление обмотки мало, а активное велико. Следовательно, пусковой ток уменьшается. По мере раскручивания ротора эффект вытеснения тока ослабевает, ток в стержне распределяется равномерно, активное сопротивление ротора уменьшается.
С двойной беличьей клеткой - сопротивление пусковой обмотки в 2-4 раза больше сопротивления рабочей обмотки, вследствие этого развивается большой пусковой момент. По мере разгона (сопротивление рабочей обмотки уменьшается) – Д работает с хорошим КПД.
Вопрос 43. Рабочие характеристики ад
Работу двигателя в устойчивой области определяют механические характеристики. Нагрузкой двигателя является внешний тормозной момент, приложенный к валу двигателя. При увеличении этого момента возрастает электромагнитный момент двигателя, в то же время от момента зависит выходная мощность Р2. В зависимости n2, M2, I1, Р1, , кпд от Р2 называются рабочими характеристиками двигателя.
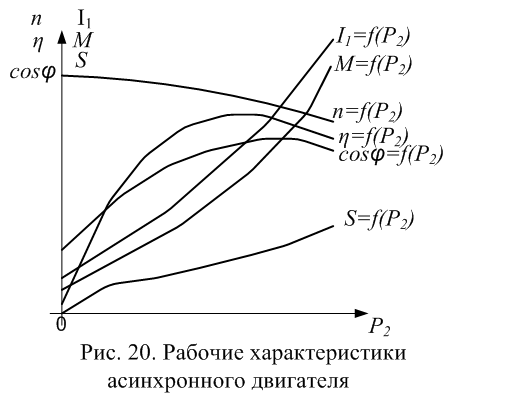
Механические характеристики показывают свойства двигателя как части электропривода, а свойства самой машины – рабочими характеристиками.
N2=f(P2) это часть механической характеристики, т. к. Р2 Рмех , а Рмех =Мр – Это жесткая характеристика, т.е. в большом диапазоне Р2 n2 изменяется незначительно.
М=f(P2) Вращающий момент М=Мх +М2 , где М2 – полезный момент, Мх – тратится на покрытие механических потерь; Мх=const. М2=Р2/р, т.к. есть некоторые изменения р, то данная зависимость несколько отлична от линейной.
cos =f(P2) cos =Ia/I при х.х. cos довольно низок – 0,2. С увеличением нагрузки Iр уменьшается, а Ia пропорционален механической нагрузке. Т.о. cos увеличивается и при помощи нагрузки достигает максимального значения 0,70,9. Следовательно, у полностью загруженного Д Ip составляет 70-40%.
=f(P2) = P2 /P1; max(75-95%) Д достигает, когда Рм= Р. У большинства Д это соответствует 75%Рн, т.к. Д проектируются с учетом того, что они не всегда полностью загружены.
Вопрос 44. Регулирование частоты вращения ад
АД обладают ценными преимуществами: надежностью, дешевизной, простотой конструкции, высоким кпд(0,7-0,95), относительно малой массой. Поэтому разработаны ряд мероприятий, для решения основных проблем АД в зависимости от его вида.
Для АД с фазным ротором используется метод реостатного регулирования –плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток от номинального значения до полной остановки. Недостаток такого регулирования является изменение жесткости характеристики: следовательно, снижается стабильность работы. РР отличается от пускового реостата тем, что РР рассчитан на продолжительный режим работы. Для АД с КЗР существуют другие методы регулирования.

Регулируя
 ,
мы можем влиять на
,
мы можем влиять на
 .
.
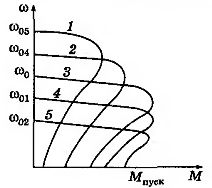
Метод частотного регулирования. Частотное регулирование обеспечивает плавное регулирование скорости путем изменения частоты тока в обмотках статора в пределах возможного частотного преобразования. В этом случае необходимо соблюдать определенные условия: закон частотного регулирования: при регулировании частоты тока нужно одновременно регулировать и напряжение, чтобы вращающийся момент оставался без изменения.

Изменение числа пар полюсов – дискретное изменение в широких пределах возможно благодаря усложнению и удорожанию конструкции АД.
