

1.2 Разработка схемы алгоритма управления роботом-манипулятором
В данном разделе представлена схема алгоритма диалогового интерфейса программы управления роботом-манипулятором.

Рисунок 6 – Схема алгоритма диалогового интерфейса программы управления роботом-манипулятором.
Подробное описание условных графических обозначений приведенных на рисунке 6:
1 – объявление переменных и массивов, используемых программой в процессе работы;
2, 3 – обработка нажатия кнопки “Connect”, производится настройка и открытие порта передачи данных между персональным компьютером и микропроцессорным устройством, предназначенным для управления роботом-манипулятором, настройка порта осуществляется в соответствии со стандартом “RS-232”;
4, 5 – обработка нажатия кнопки “Set”, производится считывание данных, введенных пользователем о положениях звеньев робота-манипулятора, формирование пакета данных, отправка пакета данных по каналу связи;
6, 7 – обработка нажатия кнопки “Refresh”, производится прием данных по каналу связи переданных микропроцессорным устройством о текущем положении звеньев робота-манипулятора;
8, 9 – обработка нажатия кнопки “Calculate”, производится расчет положений звеньев робота-манипулятора относительно конечной точки указанной пользователем, формирование пакета данных о рассчитанных положениях звеньев, отправка пакета данных по каналу связи;
10, 11 – обработка нажатия кнопки “Disconnect”, производится закрытие порта передачи данных “RS-232” между персональным компьютером и микропроцессорным устройством;
12 – обработка нажатия кнопки “Exit”, производится закрытие диалогового интерфейса программы.
2 Разработка программы управления роботом-манипулятором
В соответствии с техническим заданием и схемами алгоритмов была разработана программа управления роботом-манипулятором с помощью персонального компьютера. Программа имеет следующий функционал:
- настройка канала передачи данных по стандарту “RS232” между персональным компьютером и микропроцессорным устройством, непосредственно управляющим роботом-манипулятором;
- формирование пакетов команд для управления трехзвенным роботом-манипулятором;
- расчет обратной задачи кинематики;
- графическое построение положения робота-манипулятора.
На рисунке 7 представлено диалоговое окно программы управления роботом-манипулятором.
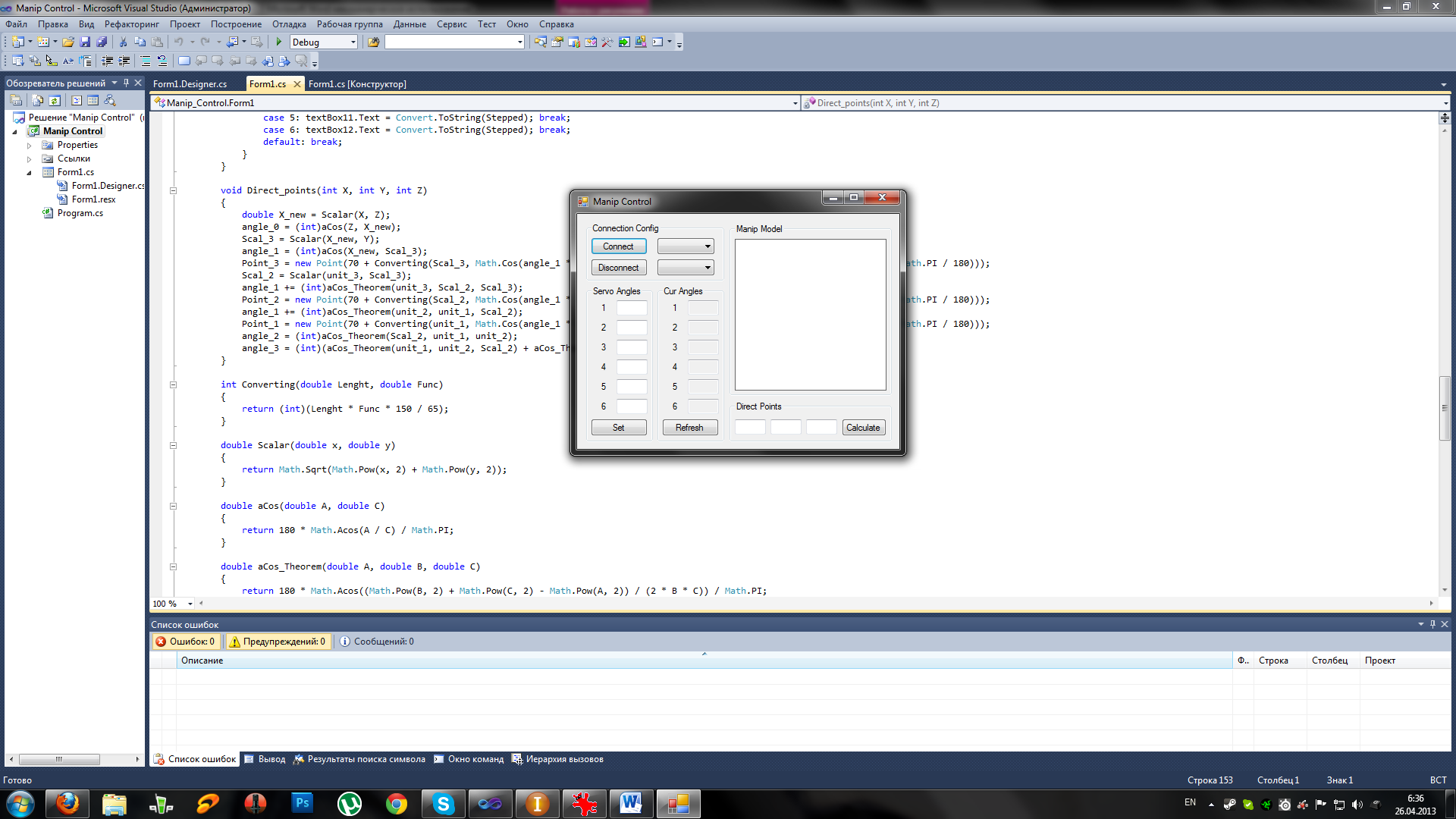
Рисунок 7 – Диалоговое окно программы
управления роботом-манипулятором
По каналу связи между персональным компьютером и микропроцессорным устройством передаются пакеты данных обеспечивающие управление роботом-манипулятором. Пакеты данных, переданные с персонального компьютера, содержат от 2 до 7 байт данных и имеют следующую структуру:
[0][angle_1][angle_2][angle_3][angle_4][angle_5][angle_6] – установка всех звеньев робота-манипулятора в заданное положение, где “0” – индекс команды установки положения, “angle_1”-“angle_6” – угол поворота соответствующего звена от 0° до 180°;
[unit][angle] – установка указанного звена в заданное положение, где “unit” – номер звена от 1 до 6, angle – угол поворота звена от 0° до 180°;
[7][0] – запрос положения всех звеньев, где “7” и “0” индекс команды запроса положения всех звеньев;
[7][unit] – запрос положения конкретного звена, где “7” индекс команды запроса положения, “unit” – номер звена от 1 до 6.
Пакеты данных, полученные персональным компьютером, содержат от 1 до 6 байт данных и имеют следующую структуру:
[angle_1][ angle_2][ angle_3][ angle_4][ angle_5][ angle_6] – ответ микропроцессорного устройства на запрос положения всех звеньев, где “angle_1”-“angle_6” – угол поворота соответствующего звена от 0° до 180°;
[angle_X] – ответ микропроцессорного устройства на запрос положения конкретного звена, “angle_X” – угол поворота конкретного звена от 0° до 180°;
Текст разработанной программы представлен в приложении А.