

Лабораторная работа № 5 Проектирование дискретных фильтров по аналоговому эквиваленту
Цель работы
1. Изучение и проверка эффективности методик расчета дискретных фильтров по аналоговым эквивалентам, частотные характеристики которых определяют требования к дискретным фильтрам.
2. Получение навыков в расчете дискретных фильтров на основе аппроксимации Эйлера.
3. Получение навыков в расчете дискретных фильтров на основе инвариантного преобразования импульсной переходной функции.
4. Получение навыков в расчете дискретных фильтров на основе билинейного преобразователя.
Теоретическое обоснование
Существует несколько подходов к проектированию цифровых фильтров. Один из распространенных подходов состоит в следующем.
1. Определяют передаточную функцию аналогового фильтра H(s), которая удовлетворяет требованиям частотной обработки сигналов, то есть в которой заданы интервалы частот пропускания и задерживания, допустимые величины амплитудных искажений сигналов в полосах пропускания и задерживания.
2. По заданной передаточной функции H(s) определяют дискретную передаточную функцию фильтра H(z), которая удовлетворяет требованиям, предъявляемым к фильтру H(s).
Переход от H(s) к H(z) можно осуществить тремя путями:
– аппроксимацией Эйлера;
– инвариантным преобразованием импульсной переходной функции;
– с помощью билинейного преобразования.
Аппроксимация Эйлера
При аппроксимации Эйлера исходные данные аналогового фильтра могут быть заданы в двух модификациях: через дифференциальные уравнения или через передаточные функции. Переход от дифференциального уравнения к разностному осуществляется путем замены производных соответствующими разностями:
![]() , (5.1)
, (5.1)

 .
.
Переход от H(s) к H(z) можно осуществить, заменив непрерывный оператор s на его дискретный аналог:
![]() . (5.2)
. (5.2)
Как следует из выражения (5.1) и (5.2) ошибка перехода от непрерыв-ного представления к дискретному зависит от интервала дискретности ТП. Поэтому частотные характеристики дискретного фильтра в полосе пропускания будет приближаться к частотным характеристикам аналогового фильтра только при условии, что интервал дискретизации ТП достаточно мал.
Инвариантное преобразование импульсной переходной функции
Построение цифровых фильтров по их аналоговому прототипу заключается в преобразовании параметров аналогового фильтра в параметры дискретного фильтра, при котором импульсные характеристики фильтров (аналогового и дискретного) совпадают в дискретные моменты времени при t = nТП.
Математически условие совпадения импульсных характеристик фильтров (аналоговых и дискретных) записывается как
![]() , (5.3)
, (5.3)
где h(t), hd(t) – импульсные характеристики аналоговых и дискретных фильтров соответственно.
Передаточная функция аналогового фильтра
![]() , (5.4)
, (5.4)
где, si –полюса (корни) передаточной функции аналогового фильтра; Ai – коэффициенты, определенные любым из известных методов; m – степень характеристического уравнения знаменателя.
Аналогично (5.4) может быть получена z-передаточная функция дискретного фильтра, представленная в виде суммы дробей:
 . (5.5)
. (5.5)
При сравнении (5.4) и (5.5) получают выражение для перехода от анало-говых фильтров к цифровым фильтрам по методу инвариантного преобразования импульсной переходной характеристики
 . (5.6)
. (5.6)
![]() .
.
Метод преобразования импульсной переходной функции базируется на связи точек плоскости S с точками плоскости Z, определяемой отношением
![]() , (5.7)
, (5.7)
где θ – угол между действительной осью плоскости Z и векторами, определяющими точки на окружности единичного радиуса плоскости Z.
Билинейное преобразование
Из (5.7) следует, что связь между точками плоскости S и Z неоднозначна, то есть цифровой фильтр не будет адекватен его аналоговому прототипу. Например, частоты ω = 0; ω = 2π/ТП и ω = 4π/ТП на плоскости Z отображаются в одну точку z = 1.
Для исключения нежелательного эффекта вводят билинейное преобразование, которое однозначно преобразует точки мнимой оси плоскости S в точки мнимой оси плоскости Z с помощью выражений (5.7) и (5.8). Выражение (5.7) преобразует мнимую ось плоскости S в окружность единичного радиуса плоскости Z, а выражение (5.8) преобразует мнимую ось плоскости S в мнимую ось плоскости Z. Выражение (5.8) известно как W-преобразование и плоскость Z при таком преобразовании обозначается как плоскость W:
![]() . (5.8)
. (5.8)
Решая уравнение (5.8) относительно z получают выражение, определяющее переход из плоскости W в плоскость S:
 . (5.9)
. (5.9)
Методика расчета цифровых фильтров базируется на выражениях (5.8), (5.9) и состоит из следующих шагов:
1) определение передаточной функции аналогового фильтра H(s);
2) применение к H(s) билинейного преобразования и получение z-пере-даточной функции цифрового фильтра:
 . (5.10)
. (5.10)
При преобразовании (5.10) у цифрового фильтра будут сохраняться форма частотных характеристик и свойства устойчивости аналогового фильтра. Связь между ω и θ будет нелинейной:
![]() , (5.11)
, (5.11)
θ = ωТП. (5.12)
Из выражений (5.11) и (5.12) можно сделать вывод, что по заданной круговой частоте ω можно определить цифровую частоту θ, а по заданной цифровой частоте θ можно определить круговую частоту ω. Изменением интервала дискретности можно менять коэффициент пропорциональности между θ и ω (5.11), что позволяет изменять АЧХ цифровых фильтров.
Описание работы
Пусть задана передаточная функция фильтра низких частот
![]() .
.
Необходимо найти соответствующий цифровой фильтр. Учитывая соотношение (5.2), получим дискретную передаточную функцию фильтра H(z):
 (5.13)
(5.13)

При ТП = 0,1 и ТП = 0,01 выражение (5.13) будет представлено в следующем виде:
![]() , (5.14)
, (5.14)
![]() . (5.15)
. (5.15)
Переход от непрерывного описания процессов к их дискретному представлению можно упростить, воспользовавшись пакетом Matlab.
h=tf([2],[1,7,10]) %Передаточная функция непрерывного фильтра
Tp=0.1; %Интервал дискретности
hd=c2d(h,Tp) %Передаточная функция дискретного фильтра
syms z s %Ввод символьных переменных
k=2; %Ввод коэффициента усиления
s=(1-z^-1)/Tp %Переход от непрерывного оператора к дискретному
hs=k/(s^2+7*s+10) %Исходное уравнение
hs1=simplify(hs) %Компактное представление исходных данных
dd=filt([0.2,0,0],[18,-27,10],Tp) %Дискретная передаточная функция
%(аппроксимация Эйлера)
figure(1)
bode(h,dd,hd),grid on %Логарифмические характеристики
Tp=0.01; %Интервал дискретности 0,01
hd=c2d(h,Tp) %Передаточная функция дискретного фильтра
syms z s %Ввод символьных переменных
k=2; %Ввод коэффициента усиления
s=(1-z^-1)/Tp %Ввод символьных переменных
hs=k/(s^2+7*s+10) %Исходное уравнение
hs2=simplify(hs) %Компактное представление исходных данных
dd2=filt([0.2,0,0],[1071,-2070,1000],Tp)
%Передаточная функция фильтра
figure(2) %Логарифмические характеристики
bode(h,hd,dd2),grid on %1-непрерывный фильтр
%2-дискретный (команда c2d), 3-аппроксимация Эйлера.
На рис. 5.1 и 5.2 представлены фильтры при разных методах аппроксимации: 1 ‑ дискретный (команда c2d); 2 ‑ дискретный (аппроксимация Эйлера); 3 ‑ аналоговый. Из рис. 5.1 и 5.2 следует, что при изменении периода дискретизации ТП наблюдается различие частотных характеристик в области рабочих частот, на которых ослабление сигнала не превышает –40 дБ. При ТП = 0,1 с дискретный фильтр, сформированный командой c2d, более устойчив в области рабочих частот, при ТП = 0,01 с дискретный фильтр, сформированный командой c2d, менее устойчив, чем дискретный фильтр, полученный с помощью аппроксимации Эйлера.
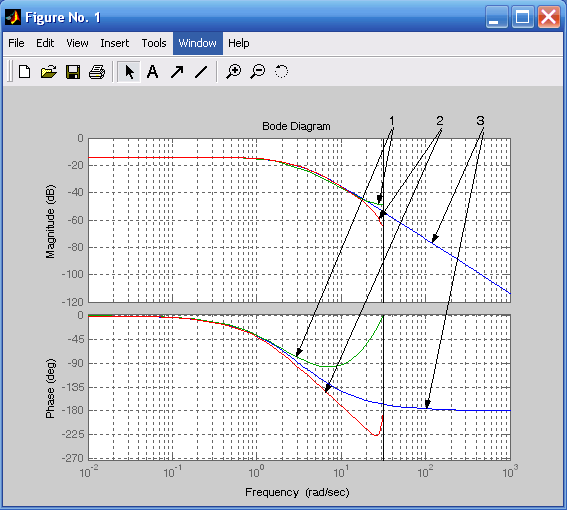
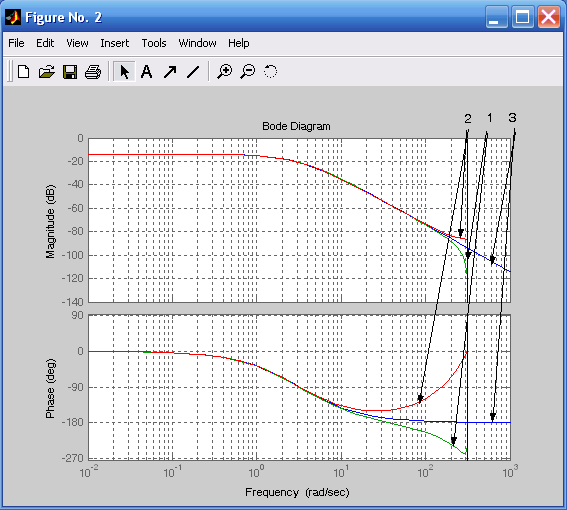
Рис. 5.1. Логарифмические характеристики Рис. 5.2. Логарифмические характеристики
фильтров при ТП = 0,1с фильтров при ТП = 0,01 с
Рассмотрим применение второго способа. Пусть задана передаточная функция аналогового фильтра
![]() .
.
Необходимо построить цифровой фильтр методом инвариантного преобразования импульсной переходной функции.
Представим передаточную функцию H(s) в виде простых дробей
![]() . (5.16)
. (5.16)
Определим A1 и A2 методом Хевисайда:
![]() ,
,
![]() .
.
Используя соотношения (5.6) и (5.16) запишем z-передаточную функцию цифрового фильтра как
 . (5.17)
. (5.17)
Упрощая выражение (5.17), получим
 . (5.18)
. (5.18)
При ТП = 0,1 с, получим
![]() . (5.19)
. (5.19)
Трудоемкие вычисления, связанные с переходом от непрерывных передаточных функций к дискретным, можно исключить с помощью процедуры:
[bd,ad]=impinvar(b,a,Fs),
где b, a – заданные векторы коэффициентов числителя и знаменателя передаточной функции аналогового прототипа; Fs – частота дискретизации сигнала; bd, ad – вычисленные коэффициенты числителя и знаменателя дискретной передаточной функции дискретного фильтра.
Процедура определения параметров дискретного фильтра по его аналоговому прототипу базируется на совпадении импульсных характеристик обоих фильтров в точках квантования сигналов:
h=tf([2],[1,7,10]) %Передаточная функция непрерывного фильтра
Tp=0.1; %Интервал дискретности
hd=c2d(h,Tp) %Передаточная функция дискретного фильтра
[n,d,t]=tfdata(h,'v') %Определение коэффициентов передаточной
%функции непрерывного фильтра
[nd,dd]=impinvar(n,d,1/Tp) %Определение коэффициентов передаточной
%функции дискретного фильтра
f=Tp*filt([0,0.0141,0],[1,-1.4253,0.4966],Tp)*10 %Передаточная
%функция нормированного дискретного фильтра
bode(h,hd,f),grid on %Логарифмические характеристики
%проектируемых фильтров.
Результаты моделирования изображены на рис. 5.3. Усиление цифрового фильтра на нулевой частоте равно 1/ТП, а усиление аналогового фильтра при ω = 0 составляет 1. Если сравнить выражение (5.19) с аналогичным выражением, полученным ранее, то наблюдается расхождение, определяемое множителем ТП. Чтобы привести в соответствие результаты расчетов, полученные аналитическим путем (5.16) – (5.19), с результатами расчетов, полученными ранее в пакете Matlab, следует пронормировать выражение (5.19), умножив его на величину, обратную частоте дискретизации.
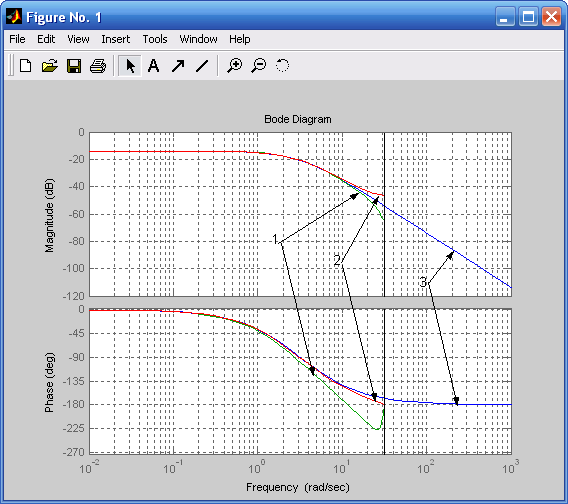
Рис. 5.3. Логарифмические характеристики фильтров: