

Ориентирование фотоснимков


Ориентирование фотоснимков может быть выполнено по координатным меткам (КМ) 1(1′) и 2(2′) или по 3(3′) и 4(4′).
В первом случае для ориентирования, т.е. для устранения несовмещений измерительных марок с КМ используют рабочие движения (штурвалы Шx (Шp)) и κл (κл).
Во втором случае для устранения несовмещений измерительных марок с КМ используют рабочие движения (штурвалы Шy (Шq)) и κл (κл).
В результате ориентирования фотоснимков должны занимать такое положение чтобы при перемещении измерительных марок по прямой 1-2 (1′-2′) измерительные марки точно проходили через соответствующие КМ.
Определение и мо шкал ск
МО шкал СК - это отсчёты по шкалам, когда измерительные марки наведены на начала систем координат фотоснимков.
Определяются МО по измерениям координатных меток:

где Vx, Vy, Vp,Vq – отсчёты по шкалам СК; 1,2,3,4 – номера координатных меток.
Собственно измерение координат точек фотоснимков заключается в стереоскопическом наведении измерительных марок на измеряемую точку и записи отсчётов по шкалам стереокомпаратора.
![]()
![]()
![]()
![]()
где х, у, р, q – координаты параллаксы одноимённых точек; Vx,Vy, Vp,Vq – отсчёты по шкалам СК при наведении измерительных марок на точку фотоснимка.
Координаты точки на правом фотоснимке вычисляют по формулам (6.7).
17.Цифровой стереокомпоратор и измерение цифровых снимков.
Цифровой СК - аппаратные и программные средства, позволяющие решать следующие задачи:
визуализировать на экране стереопару цифровых снимков;
стереоскопически наблюдать визуализированные снимки;
стереоскопически наводить марки на измеряемые точки;
зафиксировать положение марок и вычислить измеренные координаты.
Стереоскопическое визирование реализуется способами:
вывод на экран обоих фотоснимков и рассматривание их
через стереоскоп;
чересстрочная развёртка и специальные очки (эклипсный способ);
анаглифический способ.
Элементами матрицы (цифрового снимка), которая имеет М строк и N столбцов являются оптические плотности пикселов. После наведения марки-курсора на измеряемую точку, фиксируется номер строки и номер столбца, а затем вычисляются пиксельные координаты:

Пиксельные координаты (в пикселах исходного изображения) элемента d′ij увеличенного
и зображения
определяются по формуле:
зображения
определяются по формуле:

где i, j – номера строки и столбца элемента dij матрицы;
i′, j′– номера строки и столбца элемента d′ij подматрицы n×n;
n - коэффициент увеличения изображения.
Преобразования координат выполняются по формулам

В формулах:
а0 – абсцисса начала СК фотоснимка в системе координат цифрового снимка ;
b0 – ордината начала СК фотоснимка в системе координат цифрового снимка ;
φ – угол поворота системы координат фотоснимка относительно системы координат цифрового снимка.
18. Назначение и классификация фгм сетей и способов их построения.
Сущность (геометрическая) фототриангуляции состоит в следующем:
по фотоснимкам строят модель местности (рис. 1):
модель состоит из одиночных звеньев (моделей);
одиночное звено строится по стереопаре.
одиночные звенья (модели) объединяют в модель маршрута по связующим точкам. Результат – свободная сеть.
свободная сеть ориентируется относительно геодезической СК по координатам опорных точек.
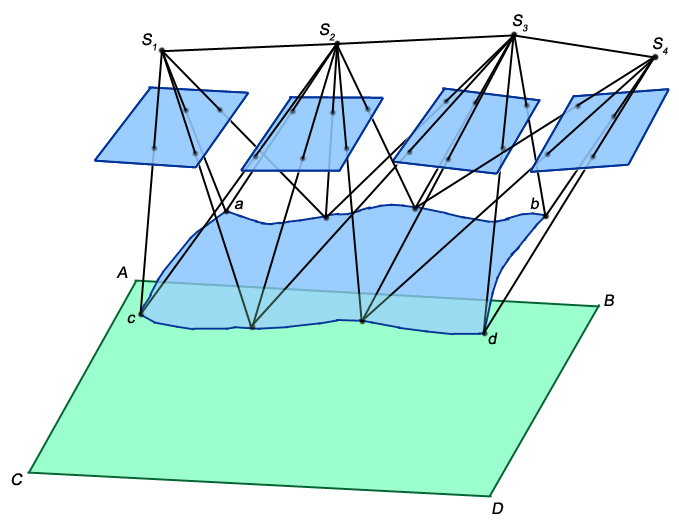
Пространственная фототриангуляция – это метод определения пространственного положения точек местности по перекрывающимся фотоснимкам, в основе которого лежит построение системы пространственных треугольников
Классификация фотограмметрических сетей



1
Рис.6. Каркасная и заполняющая фотограмметрические сети.
Рис. 5. Вариант обеспечения блочной сети опорными точками:
 9.
Теоретические основы фототриангуляции
9.
Теоретические основы фототриангуляции
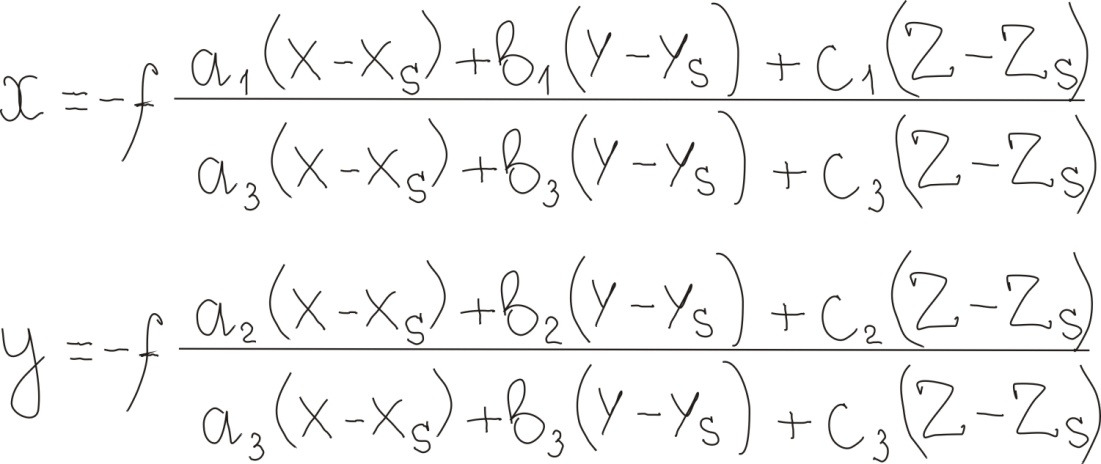
Теоретическую основу аналитической ФТ составляют зависимости, определяющие, определяющие зависимости, определяющие вид связи координат точек ФС с координатами точек местности. К ним относятся три вида зависимостей: формулы прямой фотограмметрической засечки, условие компланарности векторов и уравнения коллинеарности. Соответственно:
X = NX1
Y = NY1
Z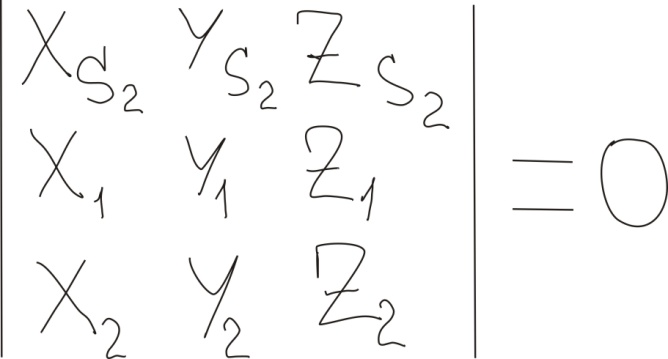 = NZ1
= NZ1
В общем виде аналитическая ФТ может быть представлена как ряд последовательных преобразований координат:
xi yi – плоские прямоугольные координаты точек ФС
Xi Yi Zi – пространственные координаты точек ФС
X Y Z – координаты точек модели
Xг Yг Zг – геодезические координаты точек местности
Геометрическая интерпретация аналитической ФТ сводится к тому, чтобы добиться прохождения каждого проектирующего луча через три точки: свой центр проекции S (Хрущ непременно спросит, как еще называется эта точка – она называется точка фотографирования), точку местности и изображение этой точки местности на соответствующем ФС. В этом случае все одноименные проектирующие лучи пересекутся в соответствующих точках местности (модели). Аналитически это означает, что если составить уравнения для всех проектирующих лучей, которые проходят через одноименные точки фотоснимков, то решение полученной системы уравнений даст координаты точки пересечения даст координаты точек пересечения этих лучей (точек на местности). Для получения системы уравнений используют уравнения, приведенные выше. Если составить такие уравнения для всех точек фотограмметрической сети и совместно решить полученную систему, то сеть будет построена.