

9 Двигатель постоянного тока последовательного возбуждения. Схема, пуск, характеристики, регулирование скорости.
Двигатель
последовательного возбуждения
– обмотки якоря и возбуждения включены
последовательно (Iд=I2=I1).
Нагрузка имеет механический характер
и механизм, который приводится в действие
создает момент сопротивления Мс.
С увеличением Мс
I2
будет
возрастать.
 .
.

П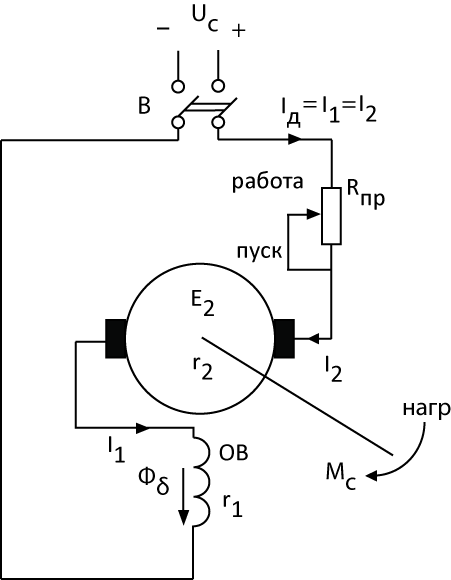 уск.
уск.
 ;
;
 ;
;
 ;
;
 – пусковой ток (безреостатный
пуск). При пуске ДПВ как и при пуске ДПрВ,
в якорную цепь включается Rпр
последовательно, тогда
– пусковой ток (безреостатный
пуск). При пуске ДПВ как и при пуске ДПрВ,
в якорную цепь включается Rпр
последовательно, тогда
 ;
; ;
;
 ,
поэтому, перед подключением двигателя
последовательного возб.
К сети
,
поэтому, перед подключением двигателя
последовательного возб.
К сети
 в максимум, В замкнут. После замыкания
В
– якорь
начинает вращаться и появляется ЭДС
в максимум, В замкнут. После замыкания
В
– якорь
начинает вращаться и появляется ЭДС
 .
. ;
;
 .
Т.е. ток
начнет уменьшаться относительно
.
Т.е. ток
начнет уменьшаться относительно
 .
По мере разгона двигателя, ток
и поэтому сопротивление можно плавно
выводить. Поэтому
условия пуска ДПС: 1) Наличие пускового
реостата
2) Наличие нагрузки на валу.
.
По мере разгона двигателя, ток
и поэтому сопротивление можно плавно
выводить. Поэтому
условия пуска ДПС: 1) Наличие пускового
реостата
2) Наличие нагрузки на валу.
Х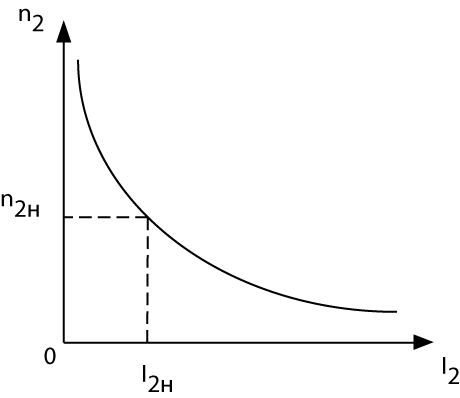 арактеристики.
Электромеханическая характеристика.
арактеристики.
Электромеханическая характеристика.
 ;
;
 – общая
э/м характеристика. n2=f(I2)
при Uc=const.
I2=I1.
Предположим, что магнитная система
двигателя ненасыщенна, т.е.
– общая
э/м характеристика. n2=f(I2)
при Uc=const.
I2=I1.
Предположим, что магнитная система
двигателя ненасыщенна, т.е.
 тогда
тогда
 – видно, что скорость обратнопропорциональна
току якоря.
– видно, что скорость обратнопропорциональна
току якоря.
С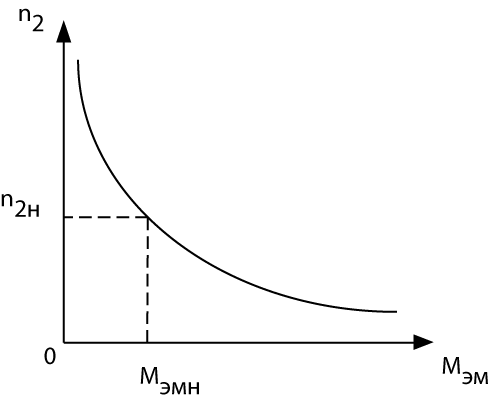 уменьшением нагрузки на валу
уменьшением нагрузки на валу
 ,
ток
,
ток
 уменьшается и скорость вращения
возрастает. При ХХ двигателя, когда
уменьшается и скорость вращения
возрастает. При ХХ двигателя, когда
 скорость
вращения двигателя
скорость
вращения двигателя
 .
М0-
момент, обусловленный
собственными потерями в двигателе. т.к.
.
М0-
момент, обусловленный
собственными потерями в двигателе. т.к.
 ,
то скорость вращения при ХХ
,
то скорость вращения при ХХ
 ,
т.е. режим аварийный, по механическим
соображениям.
Это значит, что работа двигателя без
нагрузки на валу недопустима. На практике
ДПВ используются в тех случаях, когда
режим ХХ принципиально невозможен.
(подъемно-транспортные установки). Э/м
характеристика является мягкой, скорость
вращения существенно зависит от нагрузки
на валу.
,
т.е. режим аварийный, по механическим
соображениям.
Это значит, что работа двигателя без
нагрузки на валу недопустима. На практике
ДПВ используются в тех случаях, когда
режим ХХ принципиально невозможен.
(подъемно-транспортные установки). Э/м
характеристика является мягкой, скорость
вращения существенно зависит от нагрузки
на валу.
Механическая
характеристика. n2=f(Mэм),
при Uc=U2=const. .
.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
видно, что механич. хар-ка как и эл/мех
имеет вид гиперболы.
;
видно, что механич. хар-ка как и эл/мех
имеет вид гиперболы.
Вид механической характеристики ДПВ и определяет их область применения: транспорт и подъемно-транспортные установки. Там необходимо обеспечивать плавный разгон, что достигается за счет такой характеристики.
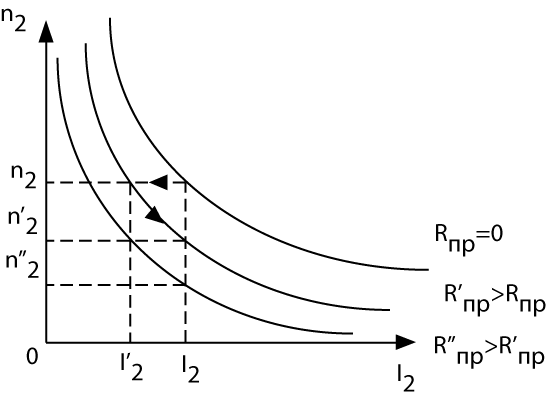
Регулирование скорости вращения.

 4
способа
регулирования скорости: 1) изменением
Uc
2) Rпр
3)
4) шунтирование ОЯ.
4
способа
регулирования скорости: 1) изменением
Uc
2) Rпр
3)
4) шунтирование ОЯ.
С помощью Rпр. . При введении Rпр, n2=const, уменьшается до (см.двигатель параллельного возбуждения). С увеличением сопротивления Rпр наклон характеристик возрастает, скорость можно регулировать только вниз от номинальной дискретно. Способ неэкономичный из-за больших эл. потерь.
Изменение
Uc
;
ток ,
уменьшается
 .
Это приводит к уменьшению Мэм.(см
двигатель параллельного возб.)
.
Это приводит к уменьшению Мэм.(см
двигатель параллельного возб.)
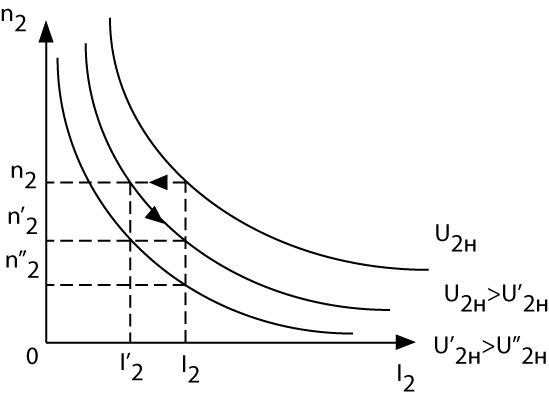
С уменьшением напряжения скорость вращения снижается. При этом способе скорость вращения можно регулировать плавно вниз относительно номинальной. Для реализации способа необходимо иметь источник регулируемого напряжения. Регулировать таким способом скорость вверх относительно n 2н практически невозможно, из-за возможного увеличения напряжения между соседними коллекторными пластинами. Наклон мех. и электромех. характеристик сохраняется.
Изменение
тока возбуждения. Uc=const,
Rпр=0,
ВШ2 – разомкнут, ВШ1 – замкнут, т.е.
параллельно ОВ включен регулирующий
реостат Rш1.
В частности при его замыкании ток ОВ
уменьшается
 ,
при этом
уменьшается и скорость вращения, как и
в ДПрВ возрастает.
,
при этом
уменьшается и скорость вращения, как и
в ДПрВ возрастает.
П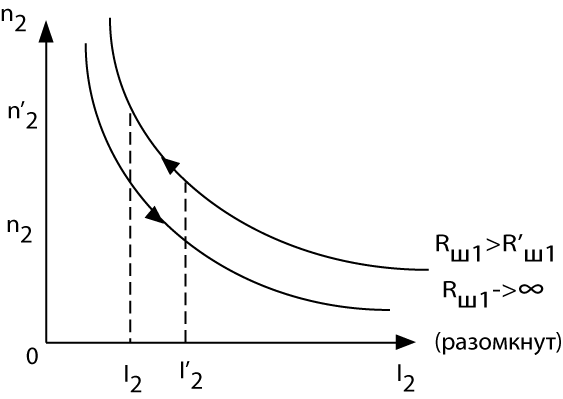 ри
шунтировании ОВ, ток возбуждения
уменьшается, поток возбуждения
уменьшается, E2
уменьшается и ток ОВ увеличивается до
как и в ДПрВ. При чем
относительно
возрастает в большее
число раз по сравнению с потоком
возбуждения. Электромагнитный момент
ри
шунтировании ОВ, ток возбуждения
уменьшается, поток возбуждения
уменьшается, E2
уменьшается и ток ОВ увеличивается до
как и в ДПрВ. При чем
относительно
возрастает в большее
число раз по сравнению с потоком
возбуждения. Электромагнитный момент
 возрастает относительно
возрастает относительно
 и скорость возрастает, как и в ДПрВ до
значения
и скорость возрастает, как и в ДПрВ до
значения
 .
.
Шунтирование
ОЯ. Rпр=0,
Uc=const,
ВШ1 – разомкнут, ВШ2 – замкнут. При
замыкания ВШ2 п оявляется
ток
оявляется
ток
 ,
но при этом ток через ОЯ останется
неизменным, т.к. этот ток определяется
нагрузкой на валу
.
Поэтому при замыкании ВШ2 возрастает
ток потребляемый
из сети.
,
но при этом ток через ОЯ останется
неизменным, т.к. этот ток определяется
нагрузкой на валу
.
Поэтому при замыкании ВШ2 возрастает
ток потребляемый
из сети.
 этот ток пойдет через ОВ, т.е. этот ток
будет
равен
этот ток пойдет через ОВ, т.е. этот ток
будет
равен
 - ток через ОВ возрастет при шунтировании
ОЯ, поток возрастет, скорость уменьшится.
- ток через ОВ возрастет при шунтировании
ОЯ, поток возрастет, скорость уменьшится.