

Двигатель постоянного тока параллельного возбуждения. Схема, пуск, способы регулирования скорости.
Д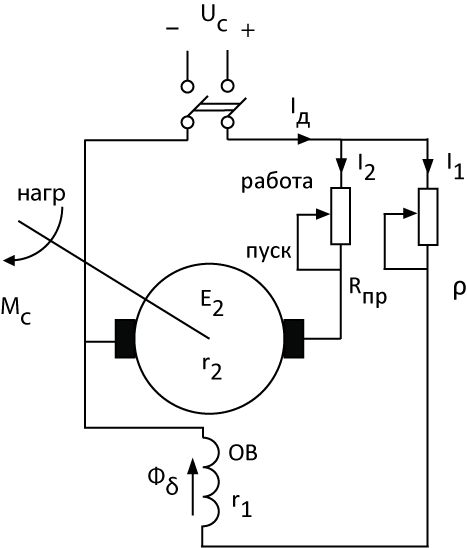 вигатель
параллельного возбуждения – двигатель
постоянного тока, у которого цепь обмоток
якоря(ОЯ) и возбуждения(ОВ) включена
параллельно относительно сети. Нагрузкой
является механизм или устройство,
которое этим двигателем приводится в
действие. Эта нагрузка создает тормозной
момент Mc.
I2-ток
ОЯ,I1-ток
ОВ, Мс-торм.момент,
Iд-ток
из сети, Е2-ЭДС
индуктированная в ОЯ, r2
– сопр-е ОЯ,r1-сопр-е
ОВ,𝜌
– регулировочный реостат цепи возбуждения,
Фδ
– поток ОВ, Rпр
–
пускорегулировочный реостат.
вигатель
параллельного возбуждения – двигатель
постоянного тока, у которого цепь обмоток
якоря(ОЯ) и возбуждения(ОВ) включена
параллельно относительно сети. Нагрузкой
является механизм или устройство,
которое этим двигателем приводится в
действие. Эта нагрузка создает тормозной
момент Mc.
I2-ток
ОЯ,I1-ток
ОВ, Мс-торм.момент,
Iд-ток
из сети, Е2-ЭДС
индуктированная в ОЯ, r2
– сопр-е ОЯ,r1-сопр-е
ОВ,𝜌
– регулировочный реостат цепи возбуждения,
Фδ
– поток ОВ, Rпр
–
пускорегулировочный реостат.
Пуск.
Уравнение напряжения якорной цепи при
 .
К якорю подводится напряжение сети Uc.
.
К якорю подводится напряжение сети Uc.
 .
Пример: U2н=220
В; r2=1
Ом; I’2н=20
А.
.
Пример: U2н=220
В; r2=1
Ом; I’2н=20
А.
 (Rпр=0).
Прямой пуск аварийный режим, поэтому
для ограничения пускового тока, на
период пука последовательно вкл реостат
Rпр.
В момент пуска он полностью введен
(max).
Тогда:
(Rпр=0).
Прямой пуск аварийный режим, поэтому
для ограничения пускового тока, на
период пука последовательно вкл реостат
Rпр.
В момент пуска он полностью введен
(max).
Тогда:
 т.к.
т.к.
 ,
то
,
то
 .
Сопротивление пускового реостата
соизмеримо с сопротивлением ОЯ. После
того, как выставили максимальный Rпр
n2
.
Сопротивление пускового реостата
соизмеримо с сопротивлением ОЯ. После
того, как выставили максимальный Rпр
n2 0:
0:
 ,
,
 ,
после того, как Я начнет вращаться, ток
начнет уменьшаться относительно
,
потому что появилась ЭДС в ОЯ.
,
после того, как Я начнет вращаться, ток
начнет уменьшаться относительно
,
потому что появилась ЭДС в ОЯ.
Регулировочный реостат 𝜌 в цепи возбуждения перед пуском двигателя ставится в min, чтобы обеспечить максимальный поток возбуждения.
Характеристики. Электромеханическая характеристика.
n2=f(I2)
при
Uc=const;
r1+𝜌=const.
Воспользуемся
уравнением напряжения для якорной цепи
для вывода зависимости. U2=E2+I2r2+∆Uщ;
E2=
kEn2Фδ.
 ;
;
 ;
;
 т.к. n2
определяется величиной Мс=>
ток I2
определяется нагрузкой на валу.
т.к. n2
определяется величиной Мс=>
ток I2
определяется нагрузкой на валу.
и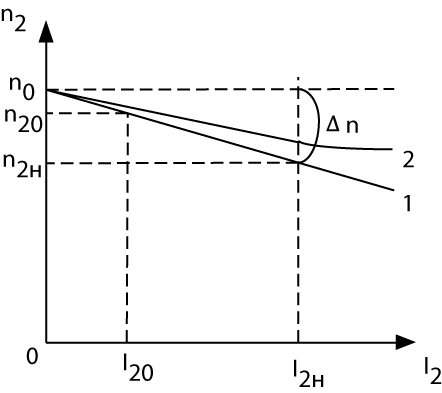 з
(*) следует, что с увеличением тока якоря,
т.е. с увеличением нагрузки на валу,
скорость вращения уменьшается, из-за
падения напряжения на сопротивлении
ОЯ. ∆n
– уменьшение скорости вращения от
перехода ХХ к нагрузке. ∆n=(5
з
(*) следует, что с увеличением тока якоря,
т.е. с увеличением нагрузки на валу,
скорость вращения уменьшается, из-за
падения напряжения на сопротивлении
ОЯ. ∆n
– уменьшение скорости вращения от
перехода ХХ к нагрузке. ∆n=(5 10%)n2н.
Жесткая электромеханическая характеристика.
10%)n2н.
Жесткая электромеханическая характеристика.
 .
Первое слагаемое – n0
– скорость вращения при идеальном ХХ,
второе - ∆n.
.
Первое слагаемое – n0
– скорость вращения при идеальном ХХ,
второе - ∆n.
 - ток потребляемый из сети при ХХ.
- ток потребляемый из сети при ХХ.
 – скорость ХХ двигателя(незначительно
меньше n0).
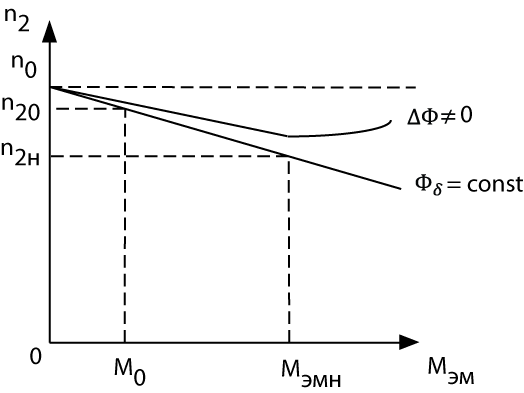
При нагрузке двигателя, появляется МДС
ОЯ и в частности если щетки расположены
на линии геометрической нейтрали, то
поперечная составляющая МДС ОЯ Fq
обуставливает уменьшение магнитного
потока через якорь, т.е. при работе
двигателя под нагрузкой Фδ-∆Ф.
∆Ф – уменьшение магнитного потока
из-за реакции якоря.
– скорость ХХ двигателя(незначительно
меньше n0).
При нагрузке двигателя, появляется МДС
ОЯ и в частности если щетки расположены
на линии геометрической нейтрали, то
поперечная составляющая МДС ОЯ Fq
обуставливает уменьшение магнитного
потока через якорь, т.е. при работе
двигателя под нагрузкой Фδ-∆Ф.
∆Ф – уменьшение магнитного потока
из-за реакции якоря. .
2 – реальная э/м хар-ка.
.
2 – реальная э/м хар-ка.
Механическая
характеристика. n2=f(Mэм)
U2=const
r1+𝜌=const
 ;
.
;
.
 ;
;
 .
Мс=0
.
Мс=0

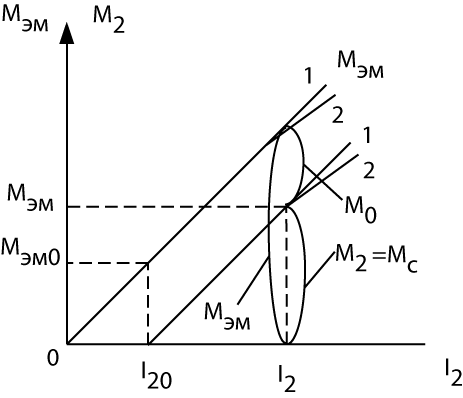
Вращающий
момент двигателя.
Мэм=Mc+M0;
Mc=M2
– полезный момент на валу двигателя.
М2=Мэм-М0; .
Зависимость: Мэм,
М2
= f(I2)
при U2=const
I1=const
.
Зависимость: Мэм,
М2
= f(I2)
при U2=const
I1=const
М0 (момент ХХ) от тока I2 не зависит => М0= const. М0 зависит от скорости вращения и возрастает с увеличением n2 Mэм0=М0. Характеристики 1 нарисованы без учета размагничивающего действия МДС ОЯ. Если двигатель без компенсационной обмотки, то с увеличением нагрузки двигателя, т.е. I2 поток уменьшается, обуславливая соответствующее уменьшение моментов (хар-ки 2).
Регулирование
скорости.
 =>
видно, что скорость вращения ДПрВ можно
регулировать следующими способами: 1)
помощью сопротивления вкл. последовательно
с ОЯ (реостатное регулирование, с пом-ю
реост. Rпр)
2) Изменением напряжения на зажимах ОЯ
3) Изменением потока возбуждения
(изм. тока возбуждения)
=>
видно, что скорость вращения ДПрВ можно
регулировать следующими способами: 1)
помощью сопротивления вкл. последовательно
с ОЯ (реостатное регулирование, с пом-ю
реост. Rпр)
2) Изменением напряжения на зажимах ОЯ
3) Изменением потока возбуждения
(изм. тока возбуждения)
Реостатное
регулирование:
U2=const;
Фδ=const;
Rпр=var.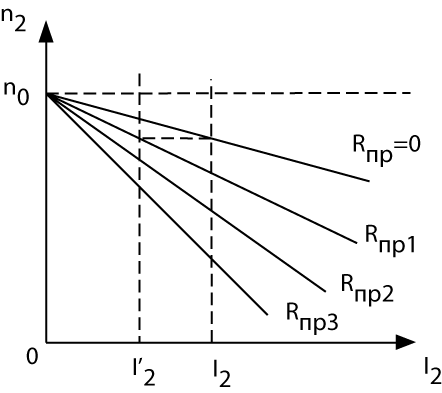
С
увеличением Rпр
возрастает наклон характеристики, но
все они выходят из одной точки. Rпр3
>Rпр2
>Rпр1
>Rпр.
 ;
;
 ,
т.е. наклон зависит от второго слагаемого.
,
т.е. наклон зависит от второго слагаемого.
 ;
;
Уменьшаем
;
;
Уменьшаем
 .
.
 .
;
Mc=const(нагрузка
на валу постоянная) .
.
;
Mc=const(нагрузка
на валу постоянная) . ,
т.е. скорость вращения уменьшается.
,
т.е. скорость вращения уменьшается. ;
;
 .
Снижение скорости вращения приводит к
снижению ЭДС
.
При этом ток
начнет увеличиваться, обуславливая
увеличение электромагнитного момента.
И процесс снижения скорости вращения
будет идти до тех пор, пока ток
,
увеличиваясь не достигнет значения,
обеспечивающего величину
.
Таким образом можно регулировать
скорость вращения вниз от номинальной.
Ступенчатое регулирование сопровождается
увеличением наклона.
.
Снижение скорости вращения приводит к
снижению ЭДС
.
При этом ток
начнет увеличиваться, обуславливая
увеличение электромагнитного момента.
И процесс снижения скорости вращения
будет идти до тех пор, пока ток
,
увеличиваясь не достигнет значения,
обеспечивающего величину
.
Таким образом можно регулировать
скорость вращения вниз от номинальной.
Ступенчатое регулирование сопровождается
увеличением наклона.
Изменение
напряжения: U2=var;
I1=const;
Rпр=0.

При
работающем двигателе
 ;Mc=const;
видно, что при уменьшении
;Mc=const;
видно, что при уменьшении ,
ток якоря уменьшается до значения
.
- скорость вращения будет уменьшаться.
Уменьшение n2
=>уменьшение Е2
=> увеличение
.
n2
будет уменьшаться до тех пор, пока
возрастая не достигнет прежнего значения
.
При регулировании скорости вращения
изменением напряжения, скорость
изменяется плавно вниз, практически до
0. Жесткость механических и э/м характеристик
сохраняется. Для реализации способа
необходимо иметь источник регулируемого
напряжения. Регулировать таким образом
скорость вверх практически невозможно,
из-за возможного увеличения напряжения
между соседними коллекторными пластинами.
,
ток якоря уменьшается до значения
.
- скорость вращения будет уменьшаться.
Уменьшение n2
=>уменьшение Е2
=> увеличение
.
n2
будет уменьшаться до тех пор, пока
возрастая не достигнет прежнего значения
.
При регулировании скорости вращения
изменением напряжения, скорость
изменяется плавно вниз, практически до
0. Жесткость механических и э/м характеристик
сохраняется. Для реализации способа
необходимо иметь источник регулируемого
напряжения. Регулировать таким образом
скорость вверх практически невозможно,
из-за возможного увеличения напряжения
между соседними коллекторными пластинами.
И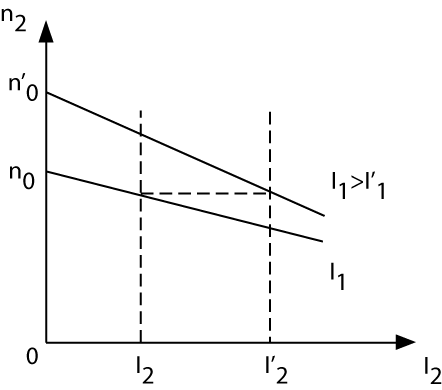 зменение
тока возбуждения: U2=const;
I1=var;
Rпр=0.
зменение
тока возбуждения: U2=const;
I1=var;
Rпр=0.
 .
. - меняются обратно-пропорционально
магнитному потоку.
- меняются обратно-пропорционально
магнитному потоку. – пограничная скорость,
– пограничная скорость,
Уменьшение
тока возбуждения сопровождается
увеличением наклона характеристики и
увеличением
,
т.е. электромеханическая характеристика
располагается выше и с большим наклоном,
т.е. при уменьшении
,
при фиксированной нагрузке, скорость
возрастает.
и
увеличением
,
т.е. электромеханическая характеристика
располагается выше и с большим наклоном,
т.е. при уменьшении
,
при фиксированной нагрузке, скорость
возрастает.
В
установившемся режиме работы
;
Mc=const.
(*),
т.е. скорость двигателя начнет увеличиваться
если
 .(*)=>
уменьшение
сопровождается уменьшением потока
и следовательно
должен бы уменьшаться.
.(*)=>
уменьшение
сопровождается уменьшением потока
и следовательно
должен бы уменьшаться.
Пример:
Дано: U2=220
В; I2н=20
А; r2=1
Ом;
Фδ=095
Фδн.
 .
В установившемся режиме практически
все напряжение подведенное к ОЯ
уравновешивается ЭДС, индуктир. в этой
обмотке. При уменьшении потока возб. На
5%, в таком же отношении уменьшится э/м
момент.
.
В установившемся режиме практически
все напряжение подведенное к ОЯ
уравновешивается ЭДС, индуктир. в этой
обмотке. При уменьшении потока возб. На
5%, в таком же отношении уменьшится э/м
момент.
 .
.
 .
Составим соотношение:
.
Составим соотношение:
 .
Т.о. при уменьшении потока возбуждения
в несколько раз, ток ОЯ возрастает в
большее число раз => поэтому э/м момент
развиваемый двигателем, при уменьшении
тока возбуждения возрастает за счет
увеличения тока ОЯ. По мере увеличения
скорости вращения, ЭДС ОЯ возрастает,
ток ОЯ
снижается обуславливая снижение Mэм.
Увеличение скорости будет происходить
до тех пор, пока не обеспечит прежнее
значение э/м момента
.
Т.о. при уменьшении потока возбуждения
в несколько раз, ток ОЯ возрастает в
большее число раз => поэтому э/м момент
развиваемый двигателем, при уменьшении
тока возбуждения возрастает за счет
увеличения тока ОЯ. По мере увеличения
скорости вращения, ЭДС ОЯ возрастает,
ток ОЯ
снижается обуславливая снижение Mэм.
Увеличение скорости будет происходить
до тех пор, пока не обеспечит прежнее
значение э/м момента
 .
Таким способом можно регулировать
скорость плавно вверх от номинальной,
но возрастает наклон э/механической и
механической характеристик.
Как
правило в регулировании скорости
двигателя параллельного возб. Используется
двухзонное регулирование: вверх от
номинальной – изменением тока возб,
вниз от номинальной – изменением
напряжения U2.
.
Таким способом можно регулировать
скорость плавно вверх от номинальной,
но возрастает наклон э/механической и
механической характеристик.
Как
правило в регулировании скорости
двигателя параллельного возб. Используется
двухзонное регулирование: вверх от
номинальной – изменением тока возб,
вниз от номинальной – изменением
напряжения U2.